
Fターム[3D246HC01]の内容
ブレーキシステム(制動力調整) (55,256) | 推定ロジック (525) | マップによるもの (251)
Fターム[3D246HC01]に分類される特許
81 - 100 / 251
制動制御システム
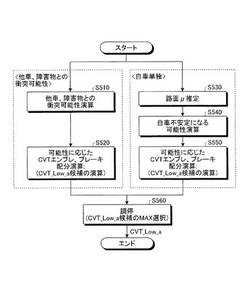
【課題】制動制御を行うときの車両の安定性を向上させることができる制動制御システムを提供すること。
【解決手段】車両の全車輪にそれぞれ配置された制動装置が車両に作用させる制動力である第一制動力、あるいは車両の動力源を車両の駆動輪に対する負荷とすることで車両に作用させる制動力である第二制動力の少なくともいずれか一方により車両を制動する制動制御システムであって、車両に要求される減速度である要求減速度を実現するときに車両に作用させる制動力における第一制動力と第二制動力との割合が、車両の挙動安定性に影響する走行環境(S510,S530,S540)に応じて変化する(S520,S550)。
(もっと読む)
電動ブレーキ装置

【課題】ブレーキペダルの操作量に応じた制動力を確保することができる電動ブレーキ装置を提供する。
【解決手段】 制動動作開始時にRAM31が記憶している剛性テーブルT0と制動間隔や制動時間等の制動状況などに伴い変化する電動キャリパ4の実際の剛性特性(位置対応の押付力特性)とが一致しない場合においても、1回の制動中に推力推定値が算出されるごとに、押付力指令値・回転位置対応特性(剛性テーブル)の更新を行うため、押付力指令値と発生押付力との偏差を低減することができ、換言すれば、電動キャリパ4の実際の剛性特性の状態に応じて押付力指令に対する追従性を確保することができる。
(もっと読む)
車両の路外逸脱防止制御装置
【課題】特に新たな機構等を設けることなく、不要な減速感による走行フィーリングの悪化を招くことがなく、路外逸脱防止のためのヨーモーメントを適切に発生する。
【解決手段】白線位置情報に基づいて第1の逸脱量yLを算出し、障害物位置情報に基づいて第2の逸脱量ySを算出し、車両1にヨーモーメントや減速度を発生させて障害物や白線に対する車両の逸脱を防止する制動力Bfi、Bfo、Bri、Broを障害物や白線に対する逸脱量yL、ySを基に算出してブレーキ制御装置10に出力する一方、交差角αと第1の逸脱量yLと第2の逸脱量ySに応じて障害物や白線に対する車両の逸脱を防止するのに必要な必要モーメントMを算出し、この必要モーメントMに応じてトルクアップ基準値Tsを設定し、車速V0に応じて設定するトルクアップ補正ゲインGtで補正してトルクアップ量ΔTを求め、エンジン制御装置11に出力する。
(もっと読む)
車両の制御装置
【課題】車両の走行環境や運転指向をより的確に反映した走行特性とすることによりドライバビリティを向上させる。
【解決手段】車両の加速度に基づいて該車両の走行状態を示す指標が求められ、該指標に応じて該車両の走行特性を設定する車両の制御装置において、運転者の運転操作に起因して変動する加速度の変動成分のうち予め定めた特定のノイズ成分を減衰させるノイズ成分除去手段(ブロックB31〜B39)と、そのノイズ成分除去手段によりノイズ成分を減衰させた加速度に基づいて指標を求める走行指標設定手段(ブロックB40)とを設けた。
(もっと読む)
車両の制御装置
【課題】操舵輪から伝達される操舵反力を迅速且つ正確に推定する。
【解決手段】
前輪及び後輪のうち少なくとも一方の舵角を変化させることが可能な舵角可変手段(200)と、前輪及び後輪のうち少なくとも一方における左右輪の制駆動力差を変化させることが可能な制駆動力可変手段(600)とを備えた車両(10)を制御する装置(100)は、車両の目標運動状態に対応する複数の目標状態量を設定する設定手段と、車両の運動状態が目標運動状態となるように、設定される複数の目標状態量に応じて舵角可変手段及び制駆動力可変手段を制御する運動制御手段と、設定される複数の目標状態量の各々、設定された複数の目標状態量に応じた上記少なくとも一方の舵角及び設定された複数の目標状態量に応じた上記少なくとも一方における左右輪の制駆動力差のうち複数の要素に基づいて、操舵反力を推定する推定手段とを具備する。
(もっと読む)
車両運動制御装置及びプログラム
【課題】車体合成力の最大値が楕円で制限される場合において、簡単な構成のマップを用いて所望の縦移動距離に対する横移動距離を最大にする軌道及び車体合成力を導出する。
【解決手段】車体合成力の最大値が縦横比γ0の楕円で制限される場合において、車体合成力の最大値及び所望の縦移動距離Xeを設定して、車体合成加速度の最大値の車体前後方向の成分F1/m、縦横比γ0、縦移動距離Xe、自車両の速度の車体前後方向の成分vx0、及び車体横方向の成分vy0により演算される第1及び第2のパラメータと、横移動距離Yeを最大にする軌道を導出するために導入された第1の導入パラメータμ1に関する値、第2の導入パラメータμ2に関する値、及び特定の条件の下、XsとYeとで示される位置に到達する時間との関係を定めたマップを用いて、所望の縦移動距離に対して横移動距離が最大となる軌道及び車体合成力を導出する。
(もっと読む)
車両運動制御装置
【課題】不必要に横転抑制制御が為されることを抑制しつつ、車両状態に対応した横転抑制制御を行うことが可能な車両運動制御装置を提供する。
【解決手段】車両への積載重量に応じて横転抑制制御を許可する基準値となるしきい速度Vtを変化させる。このため、積載重量が大きく、横転し易い車両状態のときには、車速がより低速となっても横転抑制制御が実行されるようにすることができる。これにより、車速が横転傾向情報に応じた速度となるまで横転抑制制御を行うことが可能となる。また、車両への積載が行われていない非積載状態のときにはしきい速度Vtが大きな値となるため、車両が横転する可能性がないような場合にまで不必要に横転抑制制御が実行されてしまうことを抑制することができる。よって、不必要に横転抑制制御が為されることを抑制しつつ、車両状態に対応した横転抑制制御を行うことが可能となる。
(もっと読む)
ブレーキ装置
【課題】ブレーキ装置の電源電圧が低下した際に、そのフェールセーフ制御を効果的かつ低コストに実現する。
【解決手段】ブレーキECU200は、通常の制動制御状態においては開閉弁28,30を閉弁させつつモータ40,42を駆動し、調整弁46〜54の開度を調整することで、ポンプ32,36からマスタシリンダ14への作動液の供給を遮断しつつ、ポンプ32〜38から吐出された作動液のホイールシリンダ20への供給量を調整する。一方、ブレーキECU200は、電源電圧が開閉弁28,30の最低作動電圧よりも低い低電圧状態となった場合にもモータ40,42を駆動し、ポンプ32,36から吐出された作動液の一部がマスタシリンダ14へ供給されることを許容する。
(もっと読む)
電気自動車および制動プログラム
【課題】車輪のロックを検出して制動力の制御を行う場合に比較して、制動距離を短くすることができる電気自動車および制動プログラムを提供する。
【解決手段】
前輪側の左右輪2fr,2flと後輪側の左右輪2rr,2rlとを独立に駆動する2つの電気モータ3を有する電気自動車1において、各車輪2のそれぞれに摩擦力による制動力を付与可能な摩擦ブレーキ機構と、運転者のブレーキ操作量に応じて摩擦ブレーキ機構による制動力および電気モータ3による制動力を共に発揮させ、各車輪2の少なくとも何れかのスリップ率が路面の摩擦係数に応じて設定された第1の所定値を超えたとき、ブレーキ操作量に関わらず電気モータ3による制動力を低減し、その後スリップ率が前記第1の所定値よりも低い第2の所定値以下となったとき、電気モータ3による制動力を増加する制御を行う制御装置10とを備える。
(もっと読む)
車両の旋回制御装置
【課題】通常旋回時の回頭性を向上する。
【解決手段】車両の走行状態に基づいて左右車輪に制動力を付与することにより車体にヨーモーメントを発生可能な車両の旋回制御装置1であって、横Gセンサ5と車速センサ4の検知信号に基づいて横G規範ヨーレートを算出する横G規範ヨーレート演算部14と、操舵角センサ3と車速センサ4の検知信号に基づいて定常規範ヨーレートを決定する定常規範ヨーレート演算部12と、定常規範ヨーレートに基づいて横G規範ヨーレートを増加方向に補正して限界規範ヨーレートを算出する補正部15と、限界規範ヨーレートとヨーレートセンサ6により検知された実ヨーレートとのヨーレート偏差を算出し、ヨーレート偏差を打ち消す方向へ制動力制御量を決定するFB制御量演算部19と、FB制御量演算部19により決定された制動力制御量に基づいて制動力を制御するブレーキ装置10と、を備える。
(もっと読む)
車線逸脱防止装置
【課題】ブレーキ冷間時のブレーキ制動力低下の影響を抑制して、車線逸脱防止制御として所望のヨーモーメントを自車両に付与する。
【解決手段】車線逸脱防止装置は、エンジンの始動状態(ステップS31、ステップS32)、ブレーキの作動状態(ステップS34)、ワイパーの作動状態(ステップS37)、外気温及び自車速の状態(ステップS39)に基づいて、制動力発生手段の温度を評価するブレーキエネルギ評価指標値Ecbrを算出し(ステップS41)、そのブレーキエネルギ評価指標値Ecbrに基づいて、車線逸脱防止制御の制御量としての目標ヨーモーメントを補正する(ステップS41、ステップS42)。
(もっと読む)
走行制御装置
【課題】車線変更の際に、自車両の横移動を抑制しようとする不適当な制御介入を防ぐ。
【解決手段】側方車両を検出している状態で(ステップS7の判定が“No”)、自車両の後刻横位置Xfが作動閾値Xaを超えたら(ステップS19の判定が“No”)、左右輪の制動力差によって側方車両の側とは逆方向へのヨーモーメントを発生させる(ステップS21)。但し、側方物体を検出していない状態で(ステップS7の判定が“Yes”)、自車両が車線変更のために隣接車線への進入を開始していれば(ステップS11又はS14の判定が“Yes”)、作動抑制フラグをFc=1にセットすることで(ステップS12)、その後に側方物体が現れても(ステップS7の判定が“No”)、接近防止制御の作動を抑制する(ステップS17の判定が“Yes”)。
(もっと読む)
唯一の圧力センサを備える多系統の圧力制御モジュール
本発明は、圧力媒体により操作される車両のブレーキ装置のための電空式の圧力制御モジュール(1)であって、少なくとも2つの通路(3a,3b)を備え、障害のない運転中は電気式に制御され、電気系統に障害があるときは空気圧式に制御される電空式の圧力制御モジュール(1)に関する。本発明では、唯一の圧力センサ(38)が、通路(3a,3b)の1つに設けられており、他の通路(3b,3a)内の実際作業圧は、特性マップに基づいて算出される。 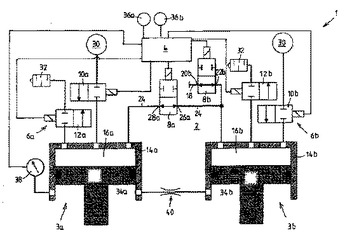 (もっと読む)
(もっと読む)
ブレーキ制御装置
【課題】大きな車両挙動に際し、その挙動抑制を図ることができるブレーキ制御装置を提供する。
【解決手段】車体の前部が上がるピッチ挙動が大きくなり、変形ピッチ角速度α・dθ/dtが所定値j01以下になって、挙動制御用制動信号算出回路14が出力する挙動制御用制動信号Fが目標制動力信号Kとしてアクチュエータ17に入力されると、前輪用のブレーキ手段が挙動制御用制動信号Fに応じた制動力を発生する。これにより、車体には前方方向の荷重移動が生じ、前記ピッチ挙動を抑制する。ピッチ運動の抑制を、ショックアブソーバの作動により行なうのではなく、車輪を制動することにより行なうので、仮にショックアブソーバがフルストロークし、ショックアブソーバによってはピッチ運動の抑制が困難な状況となる大きなピッチ挙動にも対応して、その大きなピッチ挙動の抑制を果たすことができる。
(もっと読む)
車両運動制御装置
【課題】車体合成力の最大値が楕円で制限される場合において、簡単な構成のマップを用いて目標位置及び目標位置における速度方向に到達させるため最適な軌道及び車体合成力を導出する。
【解決手段】車体合成力の最大値が縦横比γ0の楕円で制限される場合において、車体合成力の最大値を設定して、車体合成加速度の最大値の車体前後方向の成分F1/m、縦横比γ0、目標位置の車体横方向の成分Ye、自車両の速度の車体前後方向の成分vx0、及び車体横方向の成分vy0により演算される第1及び第2のパラメータと、最短回避軌道を導出するために導入された第1の導入パラメータμ1に関する値、第2の導入パラメータμ2に関する値、及び特定の条件の下、最短距離XsとYeとで示される位置に到達する時間との関係を定めたマップを用いて、目標位置及び目標位置における速度方向に到達させるために回避距離が最短となる軌道及び車体合成力を導出する。
(もっと読む)
路面状態判定装置及び車両の制御方法
【課題】路面状態を好適に判定可能にする。
【解決手段】路面状態判定装置33が、駆動輪3の空転の程度を表すスリップ値Sを測定するスリップ値測定手段41と、スリップ値測定手段41により測定されたスリップ値Sの変化率ΔSを演算する変化率演算手段42と、変化率演算手段42により演算されたスリップ値の変化率ΔSに応じて路面状態rを判定する判定手段43と、を備える。
(もっと読む)
ブレーキ装置
【課題】バキュームブースタを備えたブレーキ装置において、センサ異常時に、助勢限界後アシスト制御が適切に行われるようにする。
【解決手段】ブースタ負圧センサ、大気圧センサ、マスタシリンダ液圧センサのうちの少なくとも1つが異常である場合には、助勢限界時液圧を正確に取得できなかったり、マスタシリンダ液圧を正確に取得できなかったりするため、助勢限界後アシスト制御を適切な時期に開始することが困難であり、アシスト量を適切な大きさに制御することが困難である。そこで、減速度センサの検出値が設定減速度GB以上になった場合に助勢限界後アシスト制御が開始され、助勢限界後アシスト制御において、アシスト量を一定の固定値とする。それにより、センサが異常であっても、助勢限界後アシスト制御を適切に行うことができる。
(もっと読む)
電動式ブレーキ装置
【課題】軸力センサにより安定したブレーキ力の検出を可能にするとともに、減速度検出値による制御と組み合わせてあらゆる速度域で高い精度にてブレーキ制御を行う。
【解決手段】ブレーキロータ23の回転面に直交させて電気アクチュエータ4によりブレーキパッド22を押し付けて制動を行う電動式ブレーキにおいて、前記ブレーキパッド22の押付け力を検出する軸力センサ10から得られた検出値と、車輪速度センサ30から演算されて得られた減速度とから、運転者の操作目標とする減速度制御を行うことにより、温度変化の影響を受けにくく指向性を保持し易い直動変換部13、14に配設した軸力センサ10と、制動中のブレーキパッド22の摩擦係数の変化の影響を受けにくい減速度検出とを組み合わせて、操作者のブレーキ要求に基づく電気的ブレーキ制御をあらゆる速度域にて高い精度にて行うことが可能となった。
(もっと読む)
自動車で自動的制動を実行するための方法およびその制御装置
【課題】圧力上昇の高いダイナミクスと共に閾圧力の調節の際に高い精度も達成することが可能な、自動車における自動的制動を実行するための方法および制御装置を提供する。
【解決手段】ブレーキ回路内で支配的なブレーキ圧力が、調節可能な圧力閾値に到達したときに溢れ且つそれによってブレーキ圧力を制限する弁(USV)を用いて制限される、ブレーキ回路内でブレーキ圧力を生成するポンプによって、自動車における自動的制動を実行するための方法において、ブレーキ圧力が生成される段階の間に、弁(USV)で、予め定められている目標ブレーキ圧力よりも大きい圧力閾値が調節される。弁がより高い圧力になってから初めて開弁されるようにすれば、油圧ポンプから送られる大きな割合の流量が車輪ブレーキへ導かれて、閾圧力到達前にUSVを通して溢れてしまうことが無くなり、圧力上昇のダイナミクスが改善される。
(もっと読む)
車両運動制御装置
【課題】加減速が不要なシーンで、横運動に連係した前後加速度制御の介入を抑制し、走行シーンに対するロバスト性を向上させることができる車両運動制御装置を得ること。
【解決手段】自車両情報取得手段1により検出したドライバ入力情報等に基づいて車輪制駆動トルクアクチュエータ3やブレーキランプ4を制御する車両運動制御演算手段2は、車両に横運動を発生させる操舵操作情報、もしくは車両に発生した横運動情報の少なくとも一つに基づいて車両に発生させる前後加速度指令値を演算する前後加速度指令値演算部7と、前記操舵操作情報および前記横運動情報に基づいて前記前後加速度指令値を補正する前後加速度指令値補正演算部8を備える。
(もっと読む)
81 - 100 / 251
[ Back to top ]