
ブレーキ装置

【課題】 ブレーキ装置において、バキュームブースタの負圧−助勢限界マスタシリンダ圧特性にバラツキがあっても、その特性に相当する負圧−助勢限界マスタシリンダ圧マップを適正に補正することで、特性バラツキの影響をできるだけ抑制して、ブレーキ装置に所望のブレーキ性能を十分に発揮させる。
【解決手段】ブレーキ装置のブレーキECU26は、負圧−助勢限界圧マップと、ブレーキ操作部材の踏込時にてバキュームブースタの実際の助勢限界を超えていたか否かに判別された、ブレーキ操作部材の踏込解除時に取得した負圧とマスタシリンダ圧からなるデータと、を取得した負圧において比較し、該比較結果に基づいて負圧−助勢限界圧マップを補正する補正手段を備えている。
【解決手段】ブレーキ装置のブレーキECU26は、負圧−助勢限界圧マップと、ブレーキ操作部材の踏込時にてバキュームブースタの実際の助勢限界を超えていたか否かに判別された、ブレーキ操作部材の踏込解除時に取得した負圧とマスタシリンダ圧からなるデータと、を取得した負圧において比較し、該比較結果に基づいて負圧−助勢限界圧マップを補正する補正手段を備えている。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、ブレーキ装置に関するものである。
【背景技術】
【0002】
ブレーキ装置の一形式として、特許文献1に示されているものが知られている。特許文献1の図4に示されているように、ブレーキ装置においては、ステップS12では負圧センサで検出されたブースタ(バキュームブースタ)の負圧Pを読み込み、次にステップS14で検出された負圧Pからブースタの助勢限界である死点液圧(助勢限界マスタシリンダ液圧)の推定演算を行う。ステップS14では、特許文献1の図6に示すマップをブースタの検出負圧Pで参照し、検出負圧Pに応じた死点液圧(助勢限界マスタシリンダ液圧)を推定している。このマップは、ブースタの負圧に応じた死点液圧をプロットして作成したものである。次に、ステップS16で液圧センサで検出したマスタシリンダのブレーキ液圧(マスタシリンダ液圧)を読み込む。次に、ステップS18でこの検出したマスタシリンダ液圧が推定死点液圧を超えるか否かを判別する。ここで、マスタシリンダ液圧>推定死点液圧であればステップS22に進み、ポンプを駆動することにより、ホイールシリンダのブレーキ液圧のポンプによる加圧を行う。マスタシリンダ液圧≦推定死点液圧であればステップS20で通常のブースタ助勢動作を行って、この処理サイクルを終了する。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2000−127949号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
上述したブレーキ装置においては、特許文献1の図6に示すマップを使用して、ブースタ12の検出負圧Pに応じた死点液圧(助勢限界マスタシリンダ液圧)を推定している。このブレーキ装置においては、ブースタ12がメカ的なバラツキよる特性バラツキを有している。すなわち、このバラツキにより、同一負圧値でもブースタ12の実際の死点液圧がブースタ12ごとに異なるというおそれがあった。そうすると、前記マップを1種類だけを使用して、そのマップを多数のブレーキ装置に適用する場合には、そのマップを使用して推定された死点液圧がブースタ12の実際の死点液圧と乖離するおそれがあった。
【0005】
また、同一のブースタ12でも経時変化によりブースタ12の実際の死点液圧が変化するおそれがあった。そうすると、ブレーキ装置の使用当初は、マップを使用して推定された死点液圧がブースタ12の実際の死点液圧と一致していたが、使用期間が長期化すると乖離するおそれがあった。
【0006】
いずれの場合においても、推定された死点液圧がブースタ12の実際の死点液圧と乖離すると、実際にはブースタ12が助勢限界に到達していないのにポンプ48を作動させたり、逆に助勢限界に到達しているのにポンプ48を作動させていなかったりすることで(助勢制御の開始点がずれることで)ブレーキ装置に所望のブレーキ性能を十分に発揮させることができないおそれがあった。
【0007】
そこで、本発明は、ブレーキ装置において、バキュームブースタの負圧−助勢限界マスタシリンダ圧特性にバラツキがあっても、その特性に相当する基準値を適正に補正することで、特性バラツキの影響をできるだけ抑制して、ブレーキ装置に所望のブレーキ性能を十分に発揮させることを目的とする。
【課題を解決するための手段】
【0008】
上記の課題を解決するため、請求項1に係る発明の構成上の特徴は、ブレーキ操作部材の操作に応じたブレーキ液圧を形成するマスタシリンダと、負圧が供給されその負圧を利用することでブレーキ操作部材の操作力を助勢してマスタシリンダに出力するバキュームブースタと、マスタシリンダから供給されるブレーキ液圧の供給を受けて車両の各車輪に制動力を付与するホイールシリンダと、マスタシリンダとホイールシリンダを繋ぐ油圧経路に接続され、電動モータの出力により駆動されてブレーキ液圧を形成してマスタシリンダと独立してホイールシリンダに供給する油圧ポンプと、バキュームブースタの負圧室の負圧を取得する負圧取得手段と、マスタシリンダの圧力を取得するマスタシリンダ圧取得手段と、ブレーキ操作部材の踏込解除時点以降における負圧室の負圧の変化から、ブレーキ操作部材の踏込時にてバキュームブースタの実際の助勢限界を超えていたか否かを判別する判別手段と、バキュームブースタの助勢限界に対応したマスタシリンダの圧力限界である助勢限界圧に応じた基準値を判別手段の判別結果に基づいて補正する補正手段と、マスタシリンダ圧取得手段で取得されたマスタシリンダ圧が基準値以上である場合、油圧ポンプを駆動させる駆動手段と、を備えたことである。
【0009】
また、請求項2に係る発明の構成上の特徴は、請求項1において、補正手段は、助勢限界圧の基準値として、負圧室の任意の負圧と、その負圧における該バキュームブースタの助勢限界に対応したマスタシリンダの圧力である助勢限界圧との関係を示す負圧−助勢限界圧マップが記憶されている記憶手段を備え、負圧−助勢限界圧マップと、ブレーキ操作部材の踏込解除時に取得した負圧とマスタシリンダ圧からなるデータと、ブレーキ操作部材の踏込時におけるバキュームブースタの実際の助勢限界を超えていたか否かの判別結果に基づいて負圧−助勢限界圧マップを補正し、補正手段により補正された新しい負圧−助勢限界圧マップを記憶手段に記憶させる更新手段によって更新することである。
【0010】
また、請求項3に係る発明の構成上の特徴は、請求項2において、補正手段は、ブレーキ操作部材の踏込解除時のデータが、ブレーキ操作部材の踏込時にてバキュームブースタの実際の助勢限界を超えていたと判別されたものであって、負圧−助勢限界圧マップより下方に位置する場合、負圧−助勢限界圧マップから導出される、ブレーキ操作部材の踏込解除時の負圧室の負圧に対応した助勢限界圧と、踏込解除時のマスタシリンダ圧との偏差を補正量として導出し、負圧−助勢限界圧マップを補正量だけ下方に移動させることで補正することである。
【0011】
また、請求項4に係る発明の構成上の特徴は、請求項1乃至請求項3の何れか一項において、補正手段は、ブレーキ操作部材の踏込解除時点以降において、負圧室の負圧が一旦増大して元に戻れば、バキュームブースタの実際の助勢限界を超えてブレーキ操作部材が踏込まれた後に該踏込みが解除されたと判定することで、ブレーキ操作部材の踏込解除時のデータが、ブレーキ操作部材の踏込時にてバキュームブースタの実際の助勢限界を超えていたものであると判別されることである。
【0012】
また、請求項5に係る発明の構成上の特徴は、請求項2乃至請求項4の何れか一項において、補正手段は、ブレーキ操作部材の踏込解除時のデータが、ブレーキ操作部材の踏込時にてバキュームブースタの実際の助勢限界を超えていなかったと判別されたものであって、負圧−助勢限界圧マップより上方に位置する場合、負圧−助勢限界圧マップから導出される、ブレーキ操作部材の踏込解除時の負圧室の負圧に対応した助勢限界圧と、踏込解除時のマスタシリンダ圧との偏差を補正量として導出し、負圧−助勢限界圧マップを補正量だけ上方に移動させることで補正することである。
【0013】
また、請求項6に係る発明の構成上の特徴は、請求項1乃至請求項5の何れか一項において、補正手段は、ブレーキ操作部材の踏込解除時点以降において、負圧室の負圧が減少すれば、バキュームブースタの実際の助勢限界を超えないでブレーキ操作部材が踏込まれた後に該踏込みが解除されたと判定することで、ブレーキ操作部材の踏込解除時のデータが、ブレーキ操作部材の踏込時にてバキュームブースタの実際の助勢限界を超えていなかったものであると判別されることである。
【0014】
また、請求項7に係る発明の構成上の特徴は請求項3乃至請求項6の何れか一項において、補正手段は、導出した補正量を複数記憶し、それら複数の補正量に基づいて補正量を導出し、その導出した補正量に基づいて負圧−助勢限界圧マップを補正することである。
【0015】
また、請求項8に係る発明の構成上の特徴は、請求項2乃至請求項7の何れか一項において、ブレーキ操作部材の解除時に取得した負圧およびマスタシリンダ圧からなるデータが負圧−助勢限界圧マップを基準とした所定範囲外に位置すれば、補正手段は補正量の導出を禁止し補正を行わないことである。
【0016】
また、請求項9に係る発明の構成上の特徴は、請求項1乃至請求項8の何れか一項において、負圧源の負圧供給状態の正常・異常を検出する負圧供給状態検出手段をさらに備え、負圧供給状態検出手段が負圧供給状態が異常である旨を検出すれば、補正手段は補正量の導出を禁止し補正を行わないことである。
【発明の効果】
【0017】
上記のように構成した請求項1に係る発明においては、負圧−助勢限界圧特性の基準値は、ブレーキ操作部材の踏込み解除時の負圧変化からブレーキ操作部材の踏込時にてバキュームブースタの実際の助勢限界を超えていたか否かを判別し、ブレーキ操作部材の踏込解除時に取得した負圧とマスタシリンダ圧からなるデータを使用して補正される。したがって、制御の開始(油圧ポンプの駆動開始)を判定する判定用助勢限界圧を、実際の負圧助勢限界の結果によって適正に補正された負圧−助勢限界圧の基準値に基づいて適切に導出することができ、ひいては、適切なタイミングで助勢制御を開始させることができる。つまり、バキュームブースタの特性バラツキの影響をできるだけ抑制して、ブレーキ装置に所望のブレーキ性能を十分に発揮させることができる。
【0018】
上記のように構成した請求項2に係る発明においては、請求項1において、補正手段は、助勢限界圧の基準値として、負圧室の任意の負圧と、その負圧における該バキュームブースタの助勢限界に対応したマスタシリンダの圧力である助勢限界圧との関係を示す負圧−助勢限界圧マップが記憶されている記憶手段を備え、補正手段が、負圧−助勢限界圧マップと、ブレーキ操作部材の踏込解除時に取得した負圧とマスタシリンダ圧からなるデータと、ブレーキ操作部材の踏込時におけるバキュームブースタの実際の助勢限界を超えていたか否かの判別結果とに基づいて負圧−助勢限界圧マップを補正する。そして、補正手段により補正された新しい負圧−助勢限界圧マップを記憶手段に記憶させる。
これにより、負圧−助勢限界圧マップは、ブレーキ操作部材の踏込時にてバキュームブースタの実際の助勢限界を超えていたか否かに判別された、ブレーキ操作部材の踏込解除時に取得した負圧とマスタシリンダ圧からなるデータを使用して補正される。したがって、負圧−助勢限界圧マップを1種類だけを使用して、そのマップを多数のブレーキ装置に適用する場合、当初、そのマップがそのバキュームブースタの実際の負圧−助勢限界圧特性と異なっていても、本発明に係る補正により当初マップが実際の負圧−助勢限界圧特性となるように補正することができる。また、当初、負圧−助勢限界圧マップがバキュームブースタの実際の負圧−助勢限界圧関係と一致していたが、経時変化により実際の負圧−助勢限界圧特性が変化した場合でも、本発明に係る補正により当初マップが実際の負圧−助勢限界圧特性となるように補正することができる。このように、バキュームブースタの負圧−助勢限界圧特性にバラツキがあってもあるいは事後的に発生しても、その特性に相当する負圧−助勢限界圧マップを適正に補正することで、負圧−助勢限界圧マップが実際の負圧−助勢限界圧関係と乖離するのを抑制することができる。したがって、判定用助勢限界圧を、導出時に演算することなしに適正に補正された負圧−助勢限界圧マップに基づいて適切に導出することができる。
【0019】
上記のように構成した請求項3に係る発明においては、請求項2において、補正手段は、ブレーキ操作部材の踏込解除時のデータが、ブレーキ操作部材の踏込時にてバキュームブースタの実際の助勢限界を超えていたと判別されたものであって、負圧−助勢限界圧マップより下方に位置する場合、負圧−助勢限界圧マップから導出される、ブレーキ操作部材の踏込解除時の負圧室の負圧に対応した助勢限界圧と、踏込解除時のマスタシリンダ圧との偏差を補正量として導出し、負圧−助勢限界圧マップを補正量だけ下方に移動させることで補正する。これにより、実際の負圧−助勢限界圧特性が、記憶手段に記憶されている負圧−助勢限界圧マップより下方にずれているか或いは事後的にずれた場合であっても、負圧−助勢限界圧マップを適切に補正することができる。
【0020】
上記のように構成した請求項4に係る発明においては、請求項1乃至請求項3の何れか一項において、補正手段は、ブレーキ操作部材の踏込解除時点以降において、負圧室の負圧が一旦増大して元に戻れば、バキュームブースタの実際の助勢限界を超えてブレーキ操作部材が踏込まれた後に該踏込みが解除されたと判定することで、ブレーキ操作部材の踏込解除時のデータが、ブレーキ操作部材の踏込時にてバキュームブースタの実際の助勢限界を超えていたものであると判別される。これにより、従来から検出していた負圧に基づいて、ブレーキ操作部材の踏込解除時のデータが、ブレーキ操作部材の踏込時にてバキュームブースタの実際の助勢限界を超えていたものであると判別することができる。したがって、別の検出手段を設けなくてすむので、コスト上昇、構造複雑化、大型化を招くことなく、かつ確実に前記判別を行うことができる。
【0021】
上記のように構成した請求項5に係る発明においては、請求項2乃至請求項4の何れか一項において、補正手段は、ブレーキ操作部材の踏込解除時のデータが、ブレーキ操作部材の踏込時にてバキュームブースタの実際の助勢限界を超えていなかったと判別されたものであって、負圧−助勢限界圧マップより上方に位置する場合、負圧−助勢限界圧マップから導出される、ブレーキ操作部材の踏込解除時の負圧室の負圧に対応した助勢限界圧と、踏込解除時のマスタシリンダ圧との偏差を補正量として導出し、負圧−助勢限界圧マップを補正量だけ上方に移動させることで補正する。これにより、実際の負圧−助勢限界圧特性が、記憶手段に記憶されている負圧−助勢限界圧マップより上方にずれているか或いは事後的にずれた場合であっても、負圧−助勢限界圧マップを適切に補正することができる。
【0022】
上記のように構成した請求項6に係る発明においては、請求項1乃至請求項5の何れか一項において、補正手段は、ブレーキ操作部材の踏込解除時点以降において、負圧室の負圧が減少すれば、バキュームブースタの実際の助勢限界を超えないでブレーキ操作部材が踏込まれた後に該踏込みが解除されたと判定することで、ブレーキ操作部材の踏込解除時のデータが、ブレーキ操作部材の踏込時にてバキュームブースタの実際の助勢限界を超えていなかったものであると判別される。これにより、従来から検出していた負圧に基づいて、ブレーキ操作部材の踏込解除時のデータが、ブレーキ操作部材の踏込時にてバキュームブースタの実際の助勢限界を超えていなかったものであると判別することができる。したがって、別の検出手段を設けなくてすむので、コスト上昇、構造複雑化、大型化を招くことなく、かつ確実に前記判別を行うことができる。
【0023】
上記のように構成した請求項7に係る発明においては、請求項3乃至請求項6の何れか一項において、補正手段は、導出した補正量を複数記憶し、それら複数の補正量に基づいて補正量を導出し、その導出した補正量に基づいて負圧−助勢限界圧マップを補正する。これにより、精度のよい信頼性のある補正量を導出することができ、ひいては負圧−助勢限界圧マップを精度よく信頼性高い補正することができる。
【0024】
上記のように構成した請求項8に係る発明においては、請求項2乃至請求項7の何れか一項において、ブレーキ操作部材の解除時に取得した負圧およびマスタシリンダ圧からなるデータが負圧−助勢限界圧マップを基準とした所定範囲外に位置すれば、補正手段は補正量の導出を禁止し補正を行わない。これにより、信頼性の高い前記データのみを適切に選択して使用することで、精度のよいマップに補正することができ、ひいては、より正確な制御をおこなうことができる。
【0025】
上記のように構成した請求項9に係る発明においては、請求項1乃至請求項8の何れか一項において、負圧源の負圧供給状態の正常・異常を検出する負圧供給状態検出手段をさらに備え、負圧供給状態検出手段が負圧供給状態が異常である旨を検出すれば、補正手段は補正量の導出を禁止し補正を行わない。これにより、信頼性の低い前記データを予め排除することで、信頼性の低いデータを処理する無駄な制御を行うことなく、精度のよいマップに補正することができ、ひいては、より正確な制御をおこなうことができる。
【図面の簡単な説明】
【0026】
【図1】本発明による液圧ブレーキ装置を適用した車両の一実施の形態を示す概要図である。
【図2】図1に示す液圧ブレーキ装置の構成を示す概要図である。
【図3】図1に示すバキュームブースタの作動を説明するための図である。
【図4】図1に示すバキュームブースタの作動を説明するための図である。
【図5】図1に示すバキュームブースタの作動を説明するための図である。
【図6】図1に示すバキュームブースタの作動を説明するための図である。
【図7】図1に示すバキュームブースタの作動を説明するための図である。
【図8】図1に示すバキュームブースタの作動を説明するための図である。
【図9】図1に示すバキュームブースタの作動を説明するための図であり、上段、中段、下段にそれぞれ負圧、マスタシリンダ圧、ペダル踏力を示しており、左側のブレーキペダル21の踏込は、助勢限界圧(例えば、Pmc(3)であるとする。)を超えない場合を示し、右側のブレーキペダル21の踏込は、助勢限界圧(例えば、Pmc(3)であるとする。)を超えた場合を示している。
【図10】図1、図2に示す制御装置の構成を示す制御ブロック図である。
【図11】負圧−助勢限界圧マップ(初期マップ)を示す図である。
【図12】負圧毎におけるブレーキペダルの操作力とマスタシリンダ圧の関係を示す図である。
【図13】実ブレーキ液圧と目標ブレーキ液圧におけるブレーキペダルの操作力とマスタシリンダ圧の関係を示すとともに実ブレーキ液圧と目標ブレーキ液圧との差である目標差圧ΔPの関係を示す図である。
【図14】負圧毎におけるマスタシリンダ圧と目標差圧ΔPの関係を示す図である。
【図15】図1に示す制御装置にて実行される制御プログラム(助勢制御)のフローチャートである。
【図16】図15に示す終了処理ルーチンのフローチャートである。
【図17】図15に示す増圧制御ルーチンのフローチャートである。
【図18】図1に示す制御装置にて実行される制御プログラム(負圧−助勢限界圧マップ補正)のフローチャートである。
【図19】解除操作開始判定ルーチンのフローチャートである。
【図20】解除操作開始判定ルーチンの変形例のフローチャートである。
【図21】解除操作開始判定ルーチンの変形例のフローチャートである。
【図22】負圧増加判定ルーチンのフローチャートである。
【図23】負圧減少判定ルーチンのフローチャートである。
【図24】領域I判定・補正ルーチンのフローチャートである。
【図25】領域II判定・補正ルーチンのフローチャートである。
【図26】負圧−助勢限界圧マップを下方に補正する場合を説明する図である。
【図27】負圧−助勢限界圧マップを上方に補正する場合を説明する図である。
【図28】図1に示す制御装置にて実行される制御プログラム(負圧−助勢限界圧マップ補正)の変形例のフローチャートである。
【図29】領域I判定・補正ルーチンの変形例のフローチャートである。
【図30】領域I判定・補正ルーチンの変形例の作用を説明するための図である。
【図31】図1に示す制御装置にて実行される制御プログラム(負圧源が異常である場合にマップ補正を禁止する)のフローチャートである。
【発明を実施するための形態】
【0027】
以下、本発明に係るブレーキ装置の制御装置を適用した車両の一実施の形態を図面を参照して説明する。図1はその車両の構成を示す概要図であり、図2はブレーキ装置の構成を示す概要図である。この車両Mは、前輪駆動車であり、車体前部に搭載した駆動源であるエンジン11の駆動力が後輪でなく前輪に伝達される形式のものである。なお車両Mは前輪駆動車でなく、他の駆動方式の車両例えば後輪駆動車、四輪駆動車でもよい。
【0028】
車両Mは、エンジン11、変速機12、ディファレンシャル13および左右駆動軸14a,14bを備えており、エンジン11の駆動力は、変速機12で変速されディファレンシャル13および左右駆動軸14a,14bを経て駆動輪である左右前輪Wfl,Wfrにそれぞれ伝達される。エンジン11は、エンジン11の燃焼室内に空気を流入する吸気管11aを備えており、吸気管11a内には、吸気管11aの開閉量を調整して同吸気管11aを通過する空気量を調整するスロットルバルブ15aが設けられている。
【0029】
スロットルバルブ15aは、アクセルペダル16とスロットルバルブ15aがワイヤによって繋がれたワイヤ式でなく、電子制御式である。すなわち、スロットルバルブ15aは、エンジンECU(電子制御ユニット)17からの指令によるモータ15bの駆動によって開閉され、スロットルバルブ15aの開閉量はスロットル開度センサ15cによって検出されその検出信号がエンジンECU17に送信されており、エンジンECU17からの指令値となるようにフィードバック制御されている。エンジンECU17は、基本的にはアクセル開度センサ16aが検出するアクセルペダル16の踏込み量を受信してその踏込み量に応じたスロットルバルブ15aの開閉量に相当する指令値をモータ15bに送信する。また、エンジンECU17は、検出されたエンジン11の状態を受信してその状態を勘案して決定したスロットルバルブ15aの開閉量に相当する指令値をモータ15bに送信する。
【0030】
変速機12は、エンジン11の駆動力を変速して駆動輪に出力する自動変速機であり、複数段(例えば4速)の前進段と後進一段の変速段を有するものである。変速機12は、運転者により選択されたレンジに応じた変速段の範囲で車両負荷と車速に基づき、変速を行うようになっている。
【0031】
また、車両Mは、車両Mを制動させる液圧ブレーキ装置(ブレーキ装置)Aを備えている。液圧ブレーキ装置Aは、各ホイールシリンダWCfl,WCfr,WCrl,WCrr、ブレーキ操作部材であるブレーキペダル21、バキュームブースタ22、マスタシリンダ23、リザーバタンク24、液圧自動発生装置であるブレーキアクチュエータ25、およびブレーキ装置の制御装置であるブレーキECU26を備えている。
【0032】
各ホイールシリンダWCfl,WCfr,WCrl,WCrrは、各車輪Wfl,Wfr,Wrl,Wrrの回転をそれぞれ規制するものであり、各キャリパCLfl,CLfr,CLrl,CLrrに設けられている。各ホイールシリンダWCfl,WCfr,WCrl,WCrrに第1液圧である基礎液圧、第2液圧である補助液圧または第3液圧である制御液圧が供給されると、各ホイールシリンダWCfl,WCfr,WCrl,WCrrの各ピストン(図示省略)が摩擦部材である一対のブレーキパッド(図示省略)を押圧して各車輪Wfl,Wfr,Wrl,Wrrと一体回転する回転部材であるディスクロータDRfl,DRfr,DRrl,DRrrを両側から挟んでその回転を規制するようになっている。なお、本実施形態においては、ディスク式ブレーキを採用するようにしたが、ドラム式ブレーキを採用するようにしてもよい。
【0033】
バキュームブースタ22は、負圧供給装置(負圧源)であるエンジン11からの圧力である負圧の作用でブレーキペダル21の操作力に応じてブレーキペダル21の操作力を倍力することにより補助液圧(パワーピストンに生じた力により形成される液圧)を形成し、その補助液圧をホイールシリンダWCfl,WCfr,WCrl,WCrrに付与し、その補助液圧によって車輪Wfl,Wfr,Wrl,Wrrに第2摩擦制動力を発生させ得る装置である。
【0034】
具体的には、バキュームブースタ22(60)は、図3から図8に示すように、ハウジング61に、可動隔壁62aとバルブボデー62bを備えるパワーピストン62が組付けられていて、ハウジング61内が可動隔壁62aにより前方の負圧室(定圧室)R1と後方の変圧室R2とに区画されている。
【0035】
ハウジング61には、負圧室R1と負圧源(例えば、エンジン11の吸気管11a)とを連通させるための接続管22fが接続されている。この接続管22fには、バキュームブースタ22から吸気管11aへの気体の流れのみを許容する逆止弁22f1が設けられている。これにより、負圧源からの負圧が負圧室R1に供給され、負圧室R1は基本的に負圧源の負圧に維持されるようになっている。
【0036】
ハウジング61の前面には、マスタシリンダ23の後端が当接して固定されている。後述する出力軸68の先端部がマスタシリンダ23のピストン(図示省略)と連動するように連結されている。パワーピストン62の可動隔壁62aは、金属製で環状のプレート(図示省略)と、ゴム製で環状のダイアフラム(図示省略)とからなり、ハウジング61内にて前後方向(パワーピストン62の軸方向)へ移動可能に設置されている。
【0037】
パワーピストン62のバルブボデー62bは、可動隔壁62aの内周部に連結された樹脂製の中空体であって、円筒状に形成された中間部位にてハウジング61の後部に気密的かつ前後方向へ移動可能に組付けられている。バルブボデー62bは、ハウジング61の前部との間に介装されたリターンスプリング63によって後方に向けて付勢されている。
【0038】
また、バルブボデー62bには、前後方向にて貫通する段付の軸孔62b1が形成されている。この軸孔62b1の中間段部62cには、該中間段部62cを前後方向に貫通して中間段部62cの後方と負圧室R1を連通する連通孔62b2が形成されている。また、軸孔62b1の中間段部62c内壁面には、一対の溝62b3,62b4が前後方向に沿って形成されている。さらに、軸孔62b1の中間段部62cには、径方向に貫通して溝62b4と変圧室R2を連通する連通孔62b5が形成されている。
【0039】
中間段部62cの後端には、弁体66の負圧弁部66aに離座可能に着座する環状の負圧弁座62b6が形成されていて、この負圧弁座62b6と負圧弁部66aによって、負圧室R1と変圧室R2間を連通・遮断する負圧弁が構成されている。
【0040】
上記したバルブボデー62bの軸孔62b1には、入力軸64とプランジャ65と弁体66が同軸的に組付けられている。また、バルブボデー62bの前部には、反動部材67および出力軸(出力部材)68が同軸的に組付けられている。
【0041】
入力軸64は、バルブボデー62bに対して進退可能であり、球状先端部64aにてプランジャ65の受承連結部65aに関節状に連結されている。入力軸64の後端部は、ブレーキペダル21に連結されていて、ブレーキペダル21に作用する踏力を入力Fiとして前方に向けて受けるように構成されている。
【0042】
プランジャ65は、バルブボデー62bの軸孔62b1の中間段部62c内を前後方向に進退可能である。プランジャ65は、キー部材(図示省略)によって、バルブボデー62bに対する前後方向移動範囲を規定されている。プランジャ65には、径方向に貫通してバルブボデー62bに形成された一対の溝62b3,62b4を連通する連通孔65bが形成されている。
【0043】
プランジャ65の先端面は、反動部材67の後面に当接しており(当接可能なものも含む。)、反動部材67から出力Foの反力を部分的に受ける部分である。また、プランジャ65の後端には、環状大気弁部66bに離座可能に着座する環状の大気弁座65cが形成されていて、この大気弁座65cと環状大気弁部66bによって、変圧室R2と大気間を連通・遮断する大気弁が構成されている。
【0044】
反動部材67は、その後面の中央部位が後方に膨出変形可能なリアクションゴムディスクである。反動部材67は、出力軸68とバルブボデー62bとの変形可能な空間に収容されて、前面全体にて出力軸68の後端部後面に係合(当接)した状態にて、バルブボデー62bの前端部に組付けられている。この反動部材67は、その後面にて、プランジャ65の先端前面に常時当接または当接可能であるとともに、バルブボデー62bの円環状前端面に当接している。
【0045】
出力軸68は、反動部材67とともにバルブボデー62bの前部に前後方向へ移動可能に組付けられている。出力軸68の先端部は、マスタシリンダ23のピストンに押動可能に当接しており、制動作動時にはマスタシリンダ23のピストンから受ける反力が出力軸68を介して反動部材67に伝達するようになっている。
【0046】
負圧弁部66aと大気弁部66b(弁体66)は、圧縮スプリング69によって負圧弁座62b6と大気弁座65cに向けて(前方に向けて)付勢されている。
【0047】
このように構成されたバキュームブースタ22の動作について図3から図9を参照して説明する。図9において、左側に示すブレーキペダル21の踏込は、助勢限界圧(例えば、Pmc(3)であるとする。)を超えない場合を示し、右側に示すブレーキペダル21の踏込は、助勢限界圧(例えば、Pmc(3)であるとする。)を超えた場合を示している。
【0048】
まず、左側の場合について説明する。図3に示すように、ブレーキペダル21を踏んでいないとき(開放時;時刻t1に踏込が開始されるまで)は、プランジャ65と弁体66との間の大気弁は閉じて大気の導入が遮断されている。一方、バルブボデー62bと弁体66との間の負圧弁は開いている。このため、変圧室R2と負圧室R1は、連通孔62b5、溝62b4、連通孔65b、溝62b3、連通孔62b2を介して連通しているので、変圧室R2と負圧室R1は共に負圧状態にある。
【0049】
時刻t1に、ブレーキペダル21の踏込が開始されると、バキュームブースタ22は、図4に示すように、ブレーキペダル21の踏込開始により入力軸64が押し込まれると、プランジャ65がバルブボデー62bに先行して出力側(前方)に移動する。プランジャ65の移動にあわせて、まず負圧弁が閉じて、負圧室R1と変圧室R2が遮断される。続いて大気弁が開き、連通孔62b5、溝62b4を通して、負圧状態にあった変圧室R2に大気が導入される。すると、変圧室R2と負圧室R1の間に気圧差が発生し、この差圧によりバルブボデー62bが出力側に移動する。
【0050】
時刻t2から時刻t3までの間に、バキュームブースタ22の助勢限界圧Pmc(3)以下でブレーキペダル21(入力軸64)が保持された場合、バキュームブースタ22においては、図5に示すように、マスタシリンダ23から出力軸68への反力と、ドライバの直接の踏み込み圧力であるプランジャ65の圧力と変圧室R2と負圧室R1の差圧によって生じた圧力との合力とが釣り合う。この釣り合う位置が、ちょうどプランジャ65とバルブボデー62bの両方が弁体66に接触する位置となる。その為、変圧室R2への大気流入が止まり、一定の力をマスタシリンダ23へ加える状態が維持される。
【0051】
その後時刻t3に、図5の状態からブレーキペダル21の踏込が解除されてブレーキペダル21(入力軸64)が戻されると、図6に示すように、バルブボデー62bに先行してプランジャ65が入力側(後方)へ移動するため、大気弁が閉じたまま、負圧弁が開くこととなる。このため、変圧室R2と負圧室R1が連通され、変圧室R2の空気が負圧室R1へ導入される。変圧室R2の負圧は一瞬低下(気圧が上昇)するが、負圧源の負圧より負圧室R1の負圧が低くなる(気圧が高くなる)と、直ちに逆止弁(チェックバルブ)22f1が開かれる為、負圧室R1の負圧は負圧源の圧力に戻される。時刻t3から踏込が終了する(時刻t4)までの間、前述の負圧減増が繰り返される。
【0052】
次に、右側の場合について説明する。ブレーキペダル21の踏込開始時点から助勢限界圧を越えるまでは(時刻t11から時刻t12までは)、上述した時刻t1から時刻t2までと同様である。
【0053】
時刻t12から時刻t13までの間に、図7に示すように、助勢限界を超えて踏み込み保持すると、プランジャ65はバルブボデー62bに先行し大気弁が開いており、大気が変圧室R2に導入されるが、変圧室R2は助勢限界点で大気圧まで上昇してしまい、それ以上負圧室R1との差圧による力が増加しない。従って、バルブボデー62b(弁体66)は大気弁が閉じる位置まで移動できず、プランジャ65がバルブボデー62bに先行し、変圧室R2は大気と連通したままとなる。
【0054】
その後時刻t13に、図7の状態からブレーキペダル21が戻されると、図8に示すように、助勢限界になるまでは、負圧室R1と変圧室R2の間は負圧弁で遮断され、大気弁が開いたままとなる。このため、バルブボデー62bが入力側(後方)へ移動することにより、可動隔壁62aも入力側へ移動するため負圧室R1の容積が大きくなるが、負圧室R1は変圧室R2と遮断されているため、容積の増加によって負圧室R1の圧力が低下し、見かけ上の負圧が上昇する。この際、逆止弁22f1は閉じられるので、負圧源の負圧(可動隔壁62aが入力側へ移動開始する前の負圧)以上に負圧室R1の負圧が上昇することとなる。一方、変圧室R2の容積は小さくなるが、その分の大気は大気弁が開いているため、大気弁を通って大気吸入口62d側へ排出される。
【0055】
その後、ブレーキペダル21が戻され、バキュームブースタ22の助勢限界以下になると(時刻t14)、大気弁が閉じられ、負圧弁が開くために、変圧室R2と負圧室R1が連通し、変圧室R2の大気が負圧室R1に流れ込み、負圧室R1の負圧は一旦低下し、逆止弁22f1の作用によって、負圧源の負圧に直ちに戻される。
【0056】
また、液圧ブレーキ装置Aは、バキュームブースタ22に供給されている負圧すなわちエンジン11の吸気管11a内の負圧(接続管22f内の負圧)を検出する負圧センサ(負圧検出手段)22f2を備えており、この検出信号はブレーキECU26に送信されるようになっている。なお、負圧センサ22f2は、負圧室R1内の負圧を直接検出するように設けてもよい。
【0057】
マスタシリンダ23は、プッシュロッド22gからの入力を液圧(基礎液圧+補助液圧)に変換し、各ホイールシリンダWCfl,WCfr,WCrl,WCrrに供給する。すなわち、マスタシリンダ23は、ドライバによるブレーキペダル21の操作力(踏力)とその操作によりバキュームブースタ22のパワーピストン22bに発生する力との合力(バキュームブースタ22により倍力されたブレーキ操作力)を入力し、基礎液圧と補助液圧からなる液圧に変換して出力している。基礎液圧は、ブレーキペダル21の操作力(踏力)により形成される液圧分であり、補助液圧は、パワーピストン22bに発生する力により形成される液圧分である。なお、基礎液圧によって車輪Wfl,Wfr,Wrl,Wrrに第1摩擦制動力が発生される。
【0058】
リザーバタンク24は、ブレーキ液を貯蔵してマスタシリンダ23にそのブレーキ液を補給するものである。
【0059】
ブレーキアクチュエータ25は、マスタシリンダ23と各ホイールシリンダWCfl,WCfr,WCrl,WCrrとの間に設けられて、ブレーキペダル21の操作の有無に関係なく自動的に形成した制御液圧をホイールシリンダWCfl,WCfr,WCrl,WCrrに付与し、対応する車輪Wfl,Wfr,Wrl,Wrrに第3摩擦制動力を発生させ得る装置である。
【0060】
図2を参照してブレーキアクチュエータ25の構成を詳述する。ブレーキアクチュエータ25は、独立して作動する液圧回路である複数の系統から構成されている。具体的には、ブレーキアクチュエータ25は、X配管である第1系統25aと第2系統25bを有している。第1系統25aは、マスタシリンダ23の第1液圧室23aと左後輪Wrl,右前輪WfrのホイールシリンダWCrl,WCfrとをそれぞれ連通して、左後輪Wrl,右前輪Wfrの制動力制御に係わる系統である。第2系統25bは、マスタシリンダ23の第2液圧室23bと左前輪Wfl,右後輪WrrのホイールシリンダWCfl,WCrrとをそれぞれ連通して、左前輪Wfl,右後輪Wrrの制動力制御に係わる系統である。
【0061】
第1系統25aは、差圧制御弁41、左後輪液圧制御部42、右前輪液圧制御部43、および第1減圧部44を含んで構成されている。
【0062】
差圧制御弁41は、マスタシリンダ23と、左後輪液圧制御部42の上流部および右前輪液圧制御部43の上流部との間に介装されている常開リニア電磁弁である。この差圧制御弁41は、ブレーキECU26により連通状態(非差圧状態)と差圧状態を切り替え制御されるものである。差圧制御弁41は非通電して通常連通状態とされているが、通電して差圧状態(閉じる側)にすることによりホイールシリンダWCrl,WCfr側の液圧をマスタシリンダ23側の液圧よりも所定の制御差圧分高い圧力に保持することができる。この制御差圧はブレーキECU26により制御電流に応じて調圧されるようになっている。これにより、ポンプ44a,54aによる加圧を前提に制御差圧に相当する制御液圧が形成されるようになっている。
【0063】
左後輪液圧制御部42は、ホイールシリンダWCrlに供給する液圧を制御可能なものであり、2ポート2位置切換型の常開電磁開閉弁である増圧弁42aと2ポート2位置切換型の常閉電磁開閉弁である減圧弁42bとから構成されている。増圧弁42aは、差圧制御弁41とホイールシリンダWCrlとの間に介装されており、ブレーキECU26の指令にしたがって差圧制御弁41とホイールシリンダWCrlとを連通または遮断できるようになっている。減圧弁42bは、ホイールシリンダWCrlと調圧リザーバ44cとの間に介装されており、ブレーキECU26の指令にしたがってホイールシリンダWCrlと調圧リザーバ44cとを連通または遮断できるようになっている。これにより、ホイールシリンダWCrl内の液圧が増圧・保持・減圧され得るようになっている。
【0064】
右前輪液圧制御部43は、ホイールシリンダWCfrに供給する液圧を制御可能なものであり、左後輪液圧制御部42と同様に増圧弁43aと減圧弁43bとから構成されている。増圧弁43aおよび減圧弁43bがブレーキECU26の指令により制御されて、ホイールシリンダWCfr内の液圧が増圧・保持・減圧され得るようになっている。
【0065】
第1減圧部44は、ポンプ(油圧ポンプ)44a、ポンプ用モータ(電動モータ)44b、調圧リザーバ44cを含んで構成されている。ポンプ44aは、調圧リザーバ44c内のブレーキ液を汲み上げて、そのブレーキ液を差圧制御弁41と増圧弁42a,43aとの間に供給するようになっている。このポンプ44aは、ブレーキECU26の指令にしたがって駆動されるポンプ用モータ44bによって駆動されるようになっている。
【0066】
調圧リザーバ44cは、ホイールシリンダWCrl、WCfrから減圧弁42b、43bを介して抜いたブレーキ液を一旦溜めておく装置である。また、調圧リザーバ44cは、マスタシリンダ23と連通しており、調圧リザーバ44c内のブレーキ液が所定量以下である場合には、マスタシリンダ23からブレーキ液が供給される一方で、所定量より多い場合には、マスタシリンダ23からのブレーキ液の供給が停止されるようになっている。
【0067】
これにより、差圧制御弁41によって差圧状態が形成されるとともにポンプ44aが駆動されている場合(例えば、横滑り防止制御、トラクションコントロールなどの場合)、マスタシリンダ23から供給されているブレーキ液を調圧リザーバ44c経由で増圧弁42a,43aの上流に供給することができるようになっている。
【0068】
第2系統25bは、差圧制御弁51、左前輪液圧制御部52、右後輪液圧制御部53、および第2減圧部54を含んで構成されている。
【0069】
差圧制御弁51は、マスタシリンダ23と、左前輪液圧制御部52の上流部および右後輪液圧制御部53の上流部との間に介装されている常開リニア電磁弁である。この差圧制御弁51は、差圧制御弁41と同様に、ブレーキECU26によりホイールシリンダWCfl,WCrr側の液圧をマスタシリンダ23側の液圧に対してよりも所定の制御差圧分高い圧力に保持できるようになっている。
【0070】
左前輪液圧制御部52および右後輪液圧制御部53は、ホイールシリンダWCfl,WCrrに供給する液圧をそれぞれ制御可能なものであり、左後輪液圧制御部42と同様に、それぞれ増圧弁52aと減圧弁52b、増圧弁53aと減圧弁53bから構成されている。増圧弁52aと減圧弁52b、増圧弁53aと減圧弁53bがブレーキECU26の指令によりそれぞれ制御されて、ホイールシリンダWCfl内およびホイールシリンダWCrr内の液圧がそれぞれ増圧・保持・減圧され得るようになっている。
【0071】
第2減圧部54は、第1減圧部44と同様に、ポンプ(油圧ポンプ)54a、ポンプ用モータ44b(第1減圧部44と共用)、調圧リザーバ54cを含んで構成されている。ポンプ54aは、調圧リザーバ44cと同様な調圧リザーバ54c内のブレーキ液を汲み上げて、そのブレーキ液を差圧制御弁51と増圧弁52a,53aとの間に供給するようになっている。このポンプ54aは、ブレーキECU26の指令にしたがって駆動されるポンプ用モータ44bによって駆動されるようになっている。
【0072】
このように構成されたブレーキアクチュエータ25は、通常ブレーキの際には全ての電磁弁が非励磁状態にされて、ブレーキペダル21の操作力に応じたブレーキ液圧、すなわち基礎液圧+補助液圧をホイールシリンダWC**にそれぞれ供給できるようになっている。なお、**は、各輪に対応する添え字であって、fl,fr,rl,rrのいずれかであり、左前、右前、左後、右後を示している。以下の説明及び図面において同じである。
【0073】
また、ブレーキアクチュエータ25は、ポンプ用モータ44bすなわちポンプ44a,54aを駆動するとともに差圧制御弁41,51を励磁すると、マスタシリンダ23からの基礎液圧+補助液圧に制御液圧を加えたブレーキ液圧をホイールシリンダWC**にそれぞれ供給できるようになっている。
【0074】
さらに、ブレーキアクチュエータ25は、増圧弁42a,43a,52a,53a、および減圧弁42b,43b,52b,53bを制御することでホイールシリンダWC**の液圧を個別に調整できるようになっている。これにより、ブレーキECU26からの指示により、例えば、周知のアンチスキッド制御、前後制動力配分制御、横滑り防止制御(具体的には、アンダステア抑制制御、オーバステア抑制制御)、トラクションコントロール、車間距離制御等を達成できるようになっている。
【0075】
また、ブレーキアクチュエータ25には、マスタシリンダ23内のブレーキ液圧であるマスタシリンダ圧を検出する圧力センサ(マスタシリンダ圧検出手段)25a1が設けられており、この検出信号はブレーキECU26に送信されるようになっている。本実施の形態では、圧力センサ25a1は、第1系統25aであってマスタシリンダ23と差圧制御弁41との間に設けるようにしたが、第2系統25bの同等の位置に設けるようにしてもよい。
【0076】
また、液圧ブレーキ装置Aは、図1,2に示すように、ブレーキペダル21のストローク量を検出するペダルストロークセンサ21aを備えている。この検出信号はブレーキECU26に送信されるようになっている。ブレーキペダル21のストローク量はブレーキペダル21の操作状態を示すものであり、ペダルストロークセンサ21aはブレーキ操作状態検出手段である。
【0077】
また、液圧ブレーキ装置Aは、図1に示すように、車輪速度センサSfl,Sfr,Srl,Srrを備えている。車輪速度センサSfl,Sfr,Srl,Srrは、各車輪Wfl,Wfr,Wrl,Wrrの付近にそれぞれ設けられており、各車輪Wfl,Wfr,Wrl,Wrrの回転に応じた周波数のパルス信号をブレーキECU26に出力している。
【0078】
ブレーキECU26は、マイクロコンピュータ(図示省略)を有しており、マイクロコンピュータは、バスを介してそれぞれ接続された入出力インターフェース、CPU、RAMおよびROM(いずれも図示省略)を備えている。CPUは、図15〜図25のフローチャートに対応したプログラムを実行して、バキュームブースタ22に供給されている負圧が、所定制動力を発揮させる所定圧力に対して不足している場合、ブレーキアクチュエータ25を制御してその不足分を補ってブレーキペダル21の操作に応じた目標ブレーキ液圧をホイールシリンダWC**に供給する。
【0079】
ブレーキECU26は、液圧ブレーキ装置Aを制御する制御装置である。図10に示すように、ブレーキECU26は、バキュームブースタ22に供給されている負圧を負圧センサ22f2から取得する負圧取得部(負圧取得手段)26aと、マスタシリンダ23の圧力をマスタシリンダ圧センサ25a1から取得するマスタシリンダ圧取得部(マスタシリンダ圧取得手段)26bを有している。ブレーキECU26は、バキュームブースタ22に供給されている任意の負圧と、その負圧における該バキュームブースタ22の助勢限界に対応したマスタシリンダ23の圧力である助勢限界圧との関係を示す負圧−助勢限界圧マップが記憶されている第1記憶部(第1記憶手段)26cを有している。
【0080】
第1記憶部26cに予め記憶されている負圧−助勢限界圧マップは、図11に示すような初期マップである。初期マップは、設計値であり、シミュレーションで求めたり、実際の実験値に基づいて求めたりすることができる。負圧−助勢限界圧マップは、図12に示す負圧毎における操作力F1に対するマスタシリンダ圧の関係により求めることができる。
【0081】
バキュームブースタ22は、ブレーキペダル21の操作力F1がある値まで増加すると、変圧室R2の圧力が大気圧に達してしまい(変圧室R2に外気を導入しても負圧室R1と変圧室R2の圧力差が増加しなくなるため)、パワーピストン22bに生じる力F2のさらなる形成(増加)は行われなくなる。すなわち、変圧室R2の圧力が大気圧に到達するまでは、ブレーキペダル21の操作力F1にパワーピストン22bに生じる力F2を加えた合力が、バキュームブースタ22から出力される。一方、到達時点以降においては、その到達時点の力F2にブレーキペダル21の操作力F1の増加分のみを加算した合力が、バキュームブースタ22から出力される。変圧室R2の圧力が大気圧に到達した時点が、バキュームブースタ22が助勢限界に到達した時点である。換言すると、助勢限界とは、バキュームブースタ22が助勢機能をそれ以上発揮できなくなる限界(限度)のことであり、大気圧と負圧室R1の圧力差である負圧により決定される。
【0082】
このことから、任意の負圧において操作力F1を変化させてバキュームブースタ22の助勢限界に対応したマスタシリンダ圧を取得することで、その負圧における助勢限界圧を演算することができる。例えば、負圧がPnn(本実施の形態のブレーキ装置の目標ブレーキ液圧を得るための負圧)のときの助勢限界圧はPmc(n)であり、負圧がPnnより小さいPn3のときの助勢限界圧はPmc(3)であり、負圧がPn3より小さいPn2のときの助勢限界圧はPmc(2)であり、負圧がPn2より小さいPn1のときの助勢限界圧はPmc(1)である。なお、負圧が0のときには助勢限界は生じないで操作力F1がそのままマスタシリンダ圧となるので助勢限界圧は存在せず、すべての領域で助勢を行うことができない。
【0083】
このように演算された負圧とその負圧における助勢限界圧は一対一に関連付けができるので、関連付けられた複数のデータ(負圧,助勢限界圧)から図11に示す負圧−助勢限界圧マップを得ることができる。なお、助勢限界圧は、任意の負圧において操作力F1を変化させてバキュームブースタ22の助勢限界に対応したマスタシリンダ圧のことである。
【0084】
さらに、ブレーキECU26は、負圧取得部26aで取得された負圧と第1記憶部26cで記憶されている負圧−助勢限界圧マップとから求められる助勢限界圧を判定用助勢限界圧として演算する判定用助勢限界圧演算部(判定用助勢限界圧演算手段)26dを有している。なお、判定用助勢限界圧は、マスタシリンダ圧に基づいて助勢制御を開始するか否かを判定する際に使用する判定値である。
【0085】
さらに、ブレーキECU26は、マスタシリンダ圧取得部26bで取得されたマスタシリンダ圧が判定用助勢限界圧演算部26dで演算された判定用助勢限界圧以上である場合、ポンプ44a,54aを駆動させその駆動により形成されるブレーキ液圧をブレーキペダル21の操作に応じて形成されたマスタシリンダ圧に加圧することで、ブレーキペダル21の操作に応じた目標ブレーキ液圧をホイールシリンダWC**に供給する助勢制御を行う助勢制御部(助勢制御手段)26eを有している。
【0086】
ブレーキペダル21の操作力F1とホイールシリンダ圧(マスタシリンダ圧)との間には、図13に示すような関係がある。バキュームブースタ22に負圧が十分に供給されている場合には、ホイールシリンダWC**の目標ブレーキ液圧は、図13の一点破線で示すようになっている。この目標ブレーキ液圧は、上述したように、助勢限界を有している。この場合の助勢限界は、操作力F1がF1(n)のときに、ホイールシリンダ圧(=マスタシリンダ圧)がPwc(n)である。一方、バキュームブースタ22に負圧が前述した場合と比較して低下し(負圧がPn2のとき)、助勢限界が低くなった場合には、ホイールシリンダWC**に供給される実際のブレーキ液圧(実ブレーキ液圧)は、図13の実線で示すようになっている。この場合の助勢限界は、操作力F1がF1(n)より小さいF1(2)のときに、ホイールシリンダ圧(=マスタシリンダ圧)がPwc(n)より小さいPwc(2)である。ブレーキペダル21が操作されているとき、マスタシリンダ23からは基礎液圧と補助液圧が出力されているが、操作力F1が助勢限界に相当するF1(2)より小さい場合には、補助液圧は所望量(目標ブレーキ液圧に応じた補助液圧)だけを発生され、大きい場合には、補助液圧は前記所望量より小さい値しか発生することができない。そこで、大きい場合には、補助液圧の不足分を目標差圧ΔPとして定義し、補助液圧の不足分を制御液圧で補充するのである。
【0087】
図14に、負圧毎における実際のマスタシリンダ圧と目標差圧ΔPとの関係を示す。前述したことから、目標差圧ΔPは目標ブレーキ液圧と任意の負圧における実際のマスタシリンダ圧との差である。図14に示す関係においては、マスタシリンダ圧(ホイールシリンダ圧)が任意の負圧に対する実ブレーキ液圧の助勢限界に相当する値(負圧がPn2のとき、Pwc(2))に到達するまでは、バキュームブースタ22で助勢できるので目標差圧ΔPは0である。マスタシリンダ圧(ホイールシリンダ圧)が任意の負圧に対する実ブレーキ液圧の助勢限界に相当する値(負圧がPn2のとき、Pwc(2))以降であって目標ブレーキ液圧の助勢限界に相当する値Pwc(n)に到達するまでは、目標差圧ΔPはマスタシリンダ圧に比例して大きくなる値である。そして、マスタシリンダ圧(ホイールシリンダ圧)が目標ブレーキ液圧の助勢限界に相当する値Pwc(n)以降では、目標差圧ΔPは一定値である。
【0088】
また、負圧が小さくなるほど、目標ブレーキ液圧における助勢限界に相当するマスタシリンダ圧Pwc(n)に対するΔPが大きくなる。補助液圧の不足分が大きくなるため、制御液圧で補充する量を大きくする必要があるからである。図14において、負圧がPn2より小さいPn1である場合、そのときの関係(マスタシリンダ圧と目標差圧ΔPとの関係)は負圧がPn2のときの関係より上方に位置する。負圧がPn2より大きいPn3である場合、そのときの関係は負圧がPn2のときの関係より下方に位置する。さらに、マスタシリンダ圧がPwc(n)未満では、それらの傾きは同じである。
【0089】
なお、図14に示す関係は、バキュームブースタ22の助勢限界到達後に、ホイールシリンダ圧が操作力F1に対して助勢限界到達前と同じ勾配でリニアに増加する関係が実現されるように設定されている。また、図14に示す関係は、設計値でありブレーキECU26に予め記憶されているものである。
【0090】
一方、ブレーキECU26は、負圧−助勢限界圧マップと、ブレーキペダル21の踏込時にてバキュームブースタ22の実際の助勢限界を超えていたか否かに判別された、ブレーキペダル21の踏込解除時に取得した負圧とマスタシリンダ圧からなるデータと、を取得した負圧において比較し、該比較結果に基づいて負圧−助勢限界圧マップを補正する。
【0091】
すなわち、ブレーキECU26は、踏込解除時の負圧およびマスタシリンダ圧導出部(以下、導出部という。)26fと、データ判別部26gと、比較部26hと、補正量導出部26iと、マップ導出部26jと、マップ更新部26kとを備えている。
【0092】
導出部26fは、踏込中のブレーキペダル21の踏込が解除された時(踏込解除が開始された時)の負圧室R1の負圧およびマスタシリンダ23のマスタシリンダ圧を導出するものである。この導出部26fは、ブレーキペダル21の踏込が解除されたこと(踏込解除が開始されたこと)を判定する判定部を備えている。判定部は、マスタシリンダ圧取得部26bからマスタシリンダ圧を入力し、そのマスタシリンダ圧が今まで増加あるいはほぼ一定であったものが減少すれば、ブレーキペダル21の踏込が解除された(踏込解除が開始された)と判定する。そして、導出部26fは、判定部がブレーキペダル21の踏込が解除されたと判定した時点における、負圧室R1の負圧およびマスタシリンダ23のマスタシリンダ圧を取得する(記憶する)。この負圧室R1の負圧およびマスタシリンダ23のマスタシリンダ圧を、踏込解除時のデータという。
【0093】
なお、判定部は、マスタシリンダ圧の代わりに、ブレーキペダル21のストローク量をペダルストロークセンサ21aから取得し、そのストローク量が今まで増加あるいはほぼ一定であったものが減少すれば、ブレーキペダル21の踏込が解除されたと判定するようにしてもよい。
【0094】
データ判別部26gは、ブレーキペダル21の踏込解除時に取得した負圧とマスタシリンダ圧からなるデータを、ブレーキペダル21の踏込時にてバキュームブースタ22の実際の助勢限界を超えていたか否かに判別するものである。すなわち、データ判別部26gは、ブレーキペダル21の踏込解除時点以降における負圧室R1の負圧の変動に基づいてブレーキペダル21の踏込時にてバキュームブースタ22の実際の助勢限界を超えていたか否かに判別する。
【0095】
具体的には、データ判別部26gは、ブレーキペダル21の踏込解除時点以降において、負圧室R1の負圧が一旦増大して元に戻れば、バキュームブースタ22の実際の助勢限界を超えてブレーキペダル21が踏込まれた後に該踏込みが解除されたと判定することで、ブレーキペダル21の踏込解除時の前記データが、ブレーキペダル21の踏込時にてバキュームブースタ22の実際の助勢限界を超えていたデータであると判別する。
【0096】
これは、上記バキュームブースタ22の作動から理解できるように、バキュームブースタ22の実際の助勢限界を超えてブレーキペダル21が踏込まれ、その状態で踏み込みが保持された状態から、ブレーキペダル21が戻されると(踏込解除が開始されると)、負圧室R1の負圧が一旦増大し、その後、元の負圧に戻ることを利用するからである。
【0097】
一方、データ判別部26gは、ブレーキペダル21の踏込解除時点以降において、前記負圧室の負圧が減少すれば、バキュームブースタ22の実際の助勢限界を超えないでブレーキペダル21が踏込まれた後に該踏込みが解除されたと判定することで、ブレーキペダル21の踏込解除時の前記データが、ブレーキペダル21の踏込時にてバキュームブースタ22の実際の助勢限界を超えていなかったデータであると判別する。
【0098】
これは、上記バキュームブースタ22の作動から理解できるように、バキュームブースタ22の実際の助勢限界を超えないでブレーキペダル21が踏込まれ、その状態で踏み込みが保持された状態から、ブレーキペダル21が戻されると(踏込解除が開始されると)、負圧室R1の負圧が一旦減少し、その後、元の負圧に戻ることを利用するからである。
【0099】
比較部26hは、第1記憶部26cで記憶されている負圧−助勢限界圧マップと、ブレーキペダル21の踏込時にてバキュームブースタ22の実際の助勢限界を超えていたか否かに判別された、ブレーキペダル21の踏込解除時に取得した負圧とマスタシリンダ圧からなるデータと、を前記取得した負圧において比較するものである。
【0100】
このとき、比較部26hは、下記の場合に、前記比較を実行し、下記場合以外の場合には前記比較を実行しない。第1の場合が、ブレーキペダル21の踏込解除時のデータが、ブレーキペダル21の踏込時にてバキュームブースタ22の実際の助勢限界を超えていたと判別されたものであって、負圧−助勢限界圧マップより下方に位置する場合であり、第2の場合が、ブレーキペダル21の踏込解除時のデータが、ブレーキペダル21の踏込時にてバキュームブースタ22の実際の助勢限界を超えていなかったと判別されたものであって、負圧−助勢限界圧マップより上方に位置する場合である。
【0101】
補正量導出部26iは、比較部26hによる比較結果に基づいて負圧−助勢限界圧マップの補正量を導出するものである。具体的には、上記第1および第2のいずれの場合にも、補正量導出部26iは、負圧−助勢限界圧マップから導出される、ブレーキペダル21の踏込解除時の負圧室R1の負圧に対応した助勢限界圧と、踏込解除時のマスタシリンダ圧との偏差を補正量として導出する。
【0102】
マップ導出部26jは、補正量導出部26iにより導出された補正量、および比較部26hで比較したデータと負圧−助勢限界圧マップとの位置関係に基づいて、比較部26hで比較した負圧−助勢限界圧マップから新しい負圧−助勢限界圧マップを導出するものである。すなわち、比較部26hで比較した負圧−助勢限界圧マップが新しい負圧−助勢限界圧マップに補正される。具体的には、上記第1の場合には、マップ導出部26jは、比較部26hで比較した負圧−助勢限界圧マップを、補正量導出部26iで導出された補正量だけ下方に移動させることで新しい負圧−助勢限界圧マップに補正する。上記第2の場合には、マップ導出部26jは、比較部26hで比較した負圧−助勢限界圧マップを、補正量導出部26iで導出された補正量だけ上方に移動させることで新しい負圧−助勢限界圧マップに補正する。
【0103】
マップ更新部26kは、マップ導出部26jで導出された(補正された)新しい前記負圧−助勢限界圧マップを負圧−助勢限界圧マップとして第1記憶部26cに記憶させるものである。
【0104】
次に、上記のように構成した液圧ブレーキ装置の作動を図15〜図25のフローチャートに沿って説明する。まず、図15〜図17のフローチャートを参照して、ステップ102で取得されたマスタシリンダ圧がステップ106で演算された判定用助勢限界圧以上である場合、ポンプ44a,54aを駆動させその駆動により形成されるブレーキ液圧をブレーキペダル21の操作に応じて形成されたマスタシリンダ圧に加圧することで、ブレーキペダル21の操作に応じた目標ブレーキ液圧をホイールシリンダWC**に供給する助勢制御について説明する。
【0105】
ブレーキECU26は、例えば車両のイグニションスイッチ(図示省略)がオン状態にあるとき、上記フローチャートに対応したプログラムを所定の短時間(例えば10ミリ秒)毎に実行する。ブレーキECU26は、マスタシリンダ圧センサ25a1からマスタシリンダ圧を示すマスタシリンダ圧信号を取得し(ステップ102)、負圧センサ22f2から負圧を示す負圧信号を取得する(ステップ104)。そして、ブレーキECU26は、ステップ104で取得された負圧と第1記憶部26cで記憶されている負圧−助勢限界圧マップとから求められる助勢限界圧を判定用助勢限界圧として演算する(ステップ106)。
【0106】
続いて、ブレーキECU26は、バキュームブースタ22が助勢可能な状態にあるか否かを判定する(ステップ108)。具体的には、ブレーキECU26は、ステップ102で取得されたマスタシリンダ圧がステップ106で演算された判定用助勢限界圧以上であれば、バキュームブースタ22が助勢可能な状態ではないと判定し(「YES」と判定し)、逆に判定用助勢限界圧未満であれば、バキュームブースタ22が助勢可能な状態であると判定する(「NO」と判定する)。ここで、助勢可能な状態とは、バキュームブースタ22に供給されている負圧の作用により助勢が可能な状態のことをいう。
【0107】
バキュームブースタ22が助勢可能な状態である場合には、ブレーキECU26は、ステップ108で「NO」と判定し、終了処理を行う(ステップ110)。具体的には、ブレーキECU26は、図16のフローチャートに示すサブルーチンである終了処理に沿って増圧制御の終了処理を実行する。この終了処理ルーチンにおいては、ステップ202において、差圧制御弁41(または/および51)のソレノイドにそれをオフにする信号が出力されて、差圧制御弁41(または/および51)がオフされ(開状態とされ)、ステップ204において、ポンプ用モータ44bにそれをオフにする信号が出力されてポンプ用モータ44bがオフされポンプ44a(または/および54a)の駆動が停止される。以上でこの終了処理ルーチンの一回の実行が終了し、それにより、図15に示す助勢制御ルーチンの一回の実行も終了する。なお、図16に示す増圧制御の終了処理は、増圧制御を終了させる終了処理という作用だけなく、ブレーキペダル21の踏込開始から助勢限界に到達するまでの通常ブレーキの処理という作用も有する。通常ブレーキの処理とは、マスタシリンダ23からの液圧をホイールシリンダWC**にそのまま供給するため、差圧制御弁41(または/および51)の前後で差圧が生じないように開状態とすることである。
【0108】
一方、バキュームブースタ22が助勢可能な状態ではない場合には、ブレーキECU26は、ステップ108で「YES」と判定し、助勢制御を行う(ステップ112)。助勢制御は、ポンプ44a,54aを駆動させその駆動により形成されるブレーキ液圧をブレーキペダル21の操作に応じて形成されたマスタシリンダ圧に加圧することで、ブレーキペダル21の操作に応じた目標ブレーキ液圧をホイールシリンダWC**に供給する制御である(助勢制御手段)。
【0109】
具体的には、ブレーキECU26は、図17のフローチャートに示すサブルーチンである増圧制御に沿って助勢制御を実行する。ブレーキECU26は、ステップ302において、マスタシリンダ圧および負圧の今回値に基づき、今回のマスタシリンダ圧に増圧すべき液圧、すなわち、ホイールシリンダWC**の目標ブレーキ液圧と実際に発生しているホイールシリンダ圧(=マスタシリンダ圧)との差である目標差圧ΔPを演算する。
【0110】
そして、ブレーキECU26は、決定された目標差圧ΔPに応じ、差圧制御弁41(または/および51)のソレノイドに供給すべき電流値Iを決定する(ステップ306)。目標差圧ΔPとソレノイド電流値Iとの関係がブレーキECU26の記憶部(ROM)に記憶されており、その関係に従って目標差圧ΔPに対応するソレノイド電流値Iが決定されるのである。続いて、ブレーキECU26は、差圧制御弁41(または/および51)のソレノイドに、決定されたソレノイド電流値Iで電流を供給させることにより、差圧制御弁41(または/および51)を制御(差圧制御)する。
【0111】
その後、ブレーキECU26は、ポンプ用モータ44bにそれをONにする信号を出力する(ステップ308)。それにより、ポンプ44a(または/および54a)は、調圧リザーバ44c(または/および54c)から作動液を汲み上げ、作動液を各ホイールシリンダWC**に吐出し、その結果、各ホイールシリンダWC**にマスタシリンダ圧より目標差圧ΔPだけ高い液圧が発生させられる。
以上でこの増圧制御ルーチンの一回の実行が終了し、それにより、図15に示す助勢制御ルーチンの一回の実行も終了する。
【0112】
一方、ブレーキECU26は、上述した助勢制御で使用される負圧−助勢限界圧マップを補正して更新する。この補正更新処理について図18〜図25を参照して説明する。
【0113】
ブレーキECU26は、負圧−助勢限界圧マップと、ブレーキペダル21の踏込時にてバキュームブースタ22の実際の助勢限界を超えていたか否かに判別された、ブレーキペダル21の踏込解除時に取得した負圧とマスタシリンダ圧からなるデータと、を取得した負圧において比較し、該比較結果に基づいて負圧−助勢限界圧マップを補正する(補正手段)。
【0114】
ブレーキECU26は、図18に示すフローチャートにおいて、ブレーキペダル21の今回の操作行程の全行程に渡ってマスタシリンダ圧をマスタシリンダ圧センサ25a1から所定の短時間(例えば、10ミリ秒)毎に取得し、MC1として記憶する(ステップ402)。ブレーキECU26は、今回の操作行程の全行程に渡ってバキュームブースタ22の負圧室R1内の負圧(バキュームブースタ22に供給されている負圧でもよい)を負圧センサ22f2から所定の短時間(例えば、10ミリ秒)毎に取得し、負圧1として記憶する(ステップ404)。このように記憶されたMC1と負圧1は、同時に取得されたものを関連付けて1つのデータとして記憶されている。
【0115】
ブレーキECU26は、今回の操作行程において、踏込中のブレーキペダル21の踏込が解除された時(踏込解除が開始された時)の負圧室R1の負圧およびマスタシリンダ23のマスタシリンダ圧を導出(取得)する。まず、ブレーキECU26は、ブレーキペダル21の踏込が解除されたこと(踏込解除が開始されたこと)を判定する(ステップ406)。
【0116】
このとき、ブレーキECU26は、マスタシリンダ圧取得部26bからマスタシリンダ圧を入力し、そのマスタシリンダ圧が今まで増加あるいはほぼ一定であったものが減少すれば、ブレーキペダル21の踏込が解除された(踏込解除が開始された)と判定する(上記判定部と同様)。具体的には、ブレーキECU26は、図19に示す解除操作開始判定ルーチンを実行する。この解除操作開始判定ルーチンは所定の短時間(例えば10ミリ秒)毎に繰り返し実行される。
【0117】
ブレーキECU26は、今回取得したマスタシリンダ圧(MC圧)が前回取得したマスタシリンダ圧(MC圧)より小さい場合には、ステップ502で「YES」と判定し、解除操作が開始されたと判定する(ステップ504)。一方、ブレーキECU26は、今回取得したマスタシリンダ圧(MC圧)が前回取得したマスタシリンダ圧(MC圧)以上である場合には、ステップ502で「NO」と判定し、解除操作が開始されていないと判定する(ステップ508)。なお、ブレーキECU26は、ステップ506,510にて、今回取得したマスタシリンダ圧を前回取得したマスタシリンダ圧に更新する。また、一旦、解除操作が開始されたと判定した時点以降においては、次回の操作工程が開始されるまで、ブレーキペダル21の踏込が解除されたこと(踏込解除が開始されたこと)の判定(ステップ406)は行われない。
【0118】
そして、ブレーキECU26は、ステップ406でブレーキペダル21の踏込が解除されたと判定した場合、その解除時点における負圧室R1の負圧およびマスタシリンダ23のマスタシリンダ圧を取得し、それぞれ負圧1、MC1として記憶する(ステップ408)。この記憶されている負圧室R1の負圧(負圧1)およびマスタシリンダ23のマスタシリンダ圧(MC1)を、踏込解除時のデータという。なお、ブレーキECU26は、ステップ406でブレーキペダル21の踏込が解除されていないと判定した場合、ステップ402〜406の処理を繰り返し実行する。
【0119】
なお、図19のフローチャートに沿った解除操作開始判定処理の代わりに、図20のフローチャートに沿った解除操作開始判定処理を実行するようにしてもよい。図20に示すフローチャートは、前々回に取得したマスタシリンダ圧と前回取得したマスタシリンダ圧も併せて比較する点で図19に示すフローチャートと異なっている。異なる点についてのみ詳述する。ステップ520において、前々回に取得したマスタシリンダ圧と前回取得したマスタシリンダ圧を比較している。すなわち、ブレーキECU26は、今回取得したマスタシリンダ圧が前回取得したマスタシリンダ圧より小さく、かつ、前回取得したマスタシリンダ圧が前々回取得したマスタシリンダ圧より小さい場合には、ステップ502,520でそれぞれ「YES」と判定し、解除操作が開始されたと判定する(ステップ504)。これ以外の場合には、解除操作が開始されていないと判定する(ステップ508)。このように、今回取得したマスタシリンダ圧だけでなく前回取得したマスタシリンダ圧も使用して(いわゆる2度読みフィルタ処理)解除操作開始を判定することができる。これにより、検出したマスタシリンダ圧からノイズなどに起因する誤ったデータを除去して解除操作開始の誤判定を抑制することができる。なお、ブレーキECU26は、ステップ522,524にて、前回取得したマスタシリンダ圧を前々回取得したマスタシリンダ圧に更新する。
【0120】
さらに、図20のフローチャートに沿った解除操作開始判定処理の代わりに、図21のフローチャートに沿った解除操作開始判定処理を実行するようにしてもよい。図21に示すフローチャートは、前回に取得したマスタシリンダ圧と今回取得したマスタシリンダ圧、および前々回に取得したマスタシリンダ圧と前回取得したマスタシリンダ圧をそれぞれ比較する際に、閾値KMも考慮して比較する点で図20に示すフローチャートと異なっている。異なる点についてのみ詳述する。図20のステップ502の処理に代えて、図21のステップ530の処理を実行する。すなわち、前回に取得したマスタシリンダ圧と、今回取得したマスタシリンダ圧に閾値KMを加えた値とを比較する。図20のステップ520の処理に代えて、図21のステップ532の処理を実行する。すなわち、前々回に取得したマスタシリンダ圧と、前回取得したマスタシリンダ圧に閾値KMを加えた値とを比較する。閾値KMは、マスタシリンダ圧センサ25a1の検出ふらつきを考慮して設定されている。例えば、閾値KMは検出ふらつきより大きい値に設定されている。これにより、上記2度読みフィルタ処理でも対処できないノイズによる解除操作開始の誤判定を抑制することができ、また、マスタシリンダ圧センサ25a1の検出ふらつきによる誤判定を抑制することもできる。
【0121】
次に、ブレーキECU26は、ブレーキペダル21の踏込解除時に取得した負圧とマスタシリンダ圧からなるデータを、ブレーキペダル21の踏込時にてバキュームブースタ22の実際の助勢限界を超えていたか否かに判別する(データ判別部26g)。すなわち、ブレーキECU26は、ブレーキペダル21の踏込解除時点以降における負圧室R1の負圧の変動に基づいて、ブレーキペダル21の踏込解除時に取得した負圧とマスタシリンダ圧からなるデータを、ブレーキペダル21の踏込時にてバキュームブースタ22の実際の助勢限界を超えていたか否かに判別する。
【0122】
具体的には、ブレーキECU26は、ブレーキペダル21の踏込解除時点(踏込解除開始時点)以降において、負圧室R1の負圧が一旦増大して元に戻れば、ステップ410にて「YES」と判定し、バキュームブースタ22の実際の助勢限界を超えてブレーキペダル21が踏込まれた後に該踏込みが解除されたと判定する。そして、ブレーキECU26は、ブレーキペダル21の踏込解除時の前記データが、ブレーキペダル21の踏込時にてバキュームブースタ22の実際の助勢限界を超えていたデータであると判別する(ステップ412)。これは、上記バキュームブースタ22の作動から理解できるように、バキュームブースタ22の実際の助勢限界を超えてブレーキペダル21が踏込まれ、その状態で踏み込みが保持された状態から、ブレーキペダル21が戻されると(踏込解除が開始されると)、負圧室R1の負圧が一旦増大し、その後、元の負圧に戻ることを利用するからである。
【0123】
なお、ステップ410において、ブレーキECU26は、図22に示す負圧増加判定ルーチンを実行する。この負圧増加判定ルーチンは所定の短時間(例えば10ミリ秒)毎に繰り返し実行される。ブレーキECU26は、今回取得した負圧が前回取得した負圧より大きい場合には、ステップ602で「YES」と判定し、負圧が増加(増大)したと判定する(ステップ604)。一方、ブレーキECU26は、今回取得した負圧が前回取得した負圧以下である場合には、ステップ602で「NO」と判定し、負圧が増加(増大)していないと判定する(ステップ608)。なお、ブレーキECU26は、ステップ606,610にて、今回取得した負圧を前回取得した負圧に更新する。
【0124】
一方、ブレーキECU26は、ブレーキペダル21の踏込解除時点以降において、前記負圧室の負圧が減少すれば、ステップ410,418にて「NO」,「YES」と判定し、バキュームブースタ22の実際の助勢限界を超えないでブレーキペダル21が踏込まれた後に該踏込みが解除されたと判定する。そして、ブレーキペダル21の踏込解除時の前記データが、ブレーキペダル21の踏込時にてバキュームブースタ22の実際の助勢限界を超えていなかったデータであると判別する(ステップ420)。これは、上記バキュームブースタ22の作動から理解できるように、バキュームブースタ22の実際の助勢限界を超えないでブレーキペダル21が踏込まれ、その状態で踏み込みが保持された状態から、ブレーキペダル21が戻されると(踏込解除が開始されると)、負圧室R1の負圧が一旦減少し、その後、元の負圧に戻ることを利用するからである。
【0125】
なお、ステップ418において、ブレーキECU26は、図23に示す負圧減少判定ルーチンを実行する。この負圧減少判定ルーチンは所定の短時間(例えば10ミリ秒)毎に繰り返し実行される。ブレーキECU26は、今回取得した負圧が前回取得した負圧より小さい場合には、ステップ612で「YES」と判定し、負圧が減少したと判定する(ステップ614)。一方、ブレーキECU26は、今回取得した負圧が前回取得した負圧以上である場合には、ステップ612で「NO」と判定し、負圧が減少していないと判定する(ステップ618)。なお、ブレーキECU26は、ステップ616,620にて、今回取得した負圧を前回取得した負圧に更新する。
【0126】
次に、ブレーキECU26は、第1記憶部26cで記憶されている負圧−助勢限界圧マップと、ブレーキペダル21の踏込時にてバキュームブースタ22の実際の助勢限界を超えていたか否かに判別された、ブレーキペダル21の踏込解除時に取得した負圧とマスタシリンダ圧からなるデータと、を前記取得した負圧において比較する(比較部26h)。
【0127】
具体的には、ブレーキECU26は、第1記憶部26cで記憶されている負圧−助勢限界圧マップと、ブレーキペダル21の踏込時にてバキュームブースタ22の実際の助勢限界を超えていたと判別された踏込解除時のデータ(負圧1,MC1)と、を比較する(ステップ414)。この際、その踏込解除時のデータが領域Iに属するか否か(すなわち、負圧−助勢限界圧マップより下に位置するか否か)を判定する。
【0128】
すなわち、ブレーキECU26は、図24に示す領域I判定・補正ルーチンを実行する。ブレーキECU26は、ステップ702において、第1記憶部26cで記憶されている負圧−助勢限界圧マップを示す式MCA=A×負圧−αに踏込解除時に取得した負圧1を代入し、負圧1における(踏込解除時の負圧における)マスタシリンダ圧を導出する。前記式が1次関数である場合において、Aは傾きであり、αは切片であるとする(図26および図27の初期マップ(補正前マップ))。そして、ブレーキECU26は、ステップ704において、ステップ702で負圧−助勢限界圧マップから導出した踏込解除時の負圧である負圧1におけるマスタシリンダ圧MCAと、踏込解除時に取得したマスタシリンダ圧MC1と、を比較する。ブレーキECU26は、MC1がMCAより小さい場合には、踏込解除時のデータが領域Iに属すると判定し、MC1がMCAより大きい場合には、踏込解除時のデータが領域I以外である(領域IIに属する)と判定する。
【0129】
ここで、第1記憶部26cに記憶されている負圧−助勢限界圧マップが実際のバキュームブースタ22の特性と一致している場合においては、バキュームブースタ22の実際の助勢限界を超えていた踏込解除時のデータのマスタシリンダ圧は、踏込解除時の負圧において負圧−助勢限界圧マップより上に位置するものであり下に位置することはない。逆に、バキュームブースタ22の実際の助勢限界を超えていない踏込解除時のデータのマスタシリンダ圧は、踏込解除時の負圧において負圧−助勢限界圧マップより下に位置するものであり上に位置することはない。
【0130】
しかし、第1記憶部26cに記憶されている負圧−助勢限界圧マップに対して実際のバキュームブースタ22の特性が下にずれた場合においては、バキュームブースタ22の実際の助勢限界を超えていた踏込解除時のデータのマスタシリンダ圧が、踏込解除時の負圧において記憶されている負圧−助勢限界圧マップより下に位置する場合が発生する。第1記憶部26cに記憶されている負圧−助勢限界圧マップに対して実際のバキュームブースタ22の特性が下にずれているからである。
【0131】
このことを利用して、図26に示すように、第1記憶部26cで記憶されている負圧−助勢限界圧マップ(初期マップ)に対して、ブレーキペダル21の踏込時にてバキュームブースタ22の実際の助勢限界を超えていたと判別された踏込解除時のデータ(負圧1,MC1)が領域Iに属していれば(すなわち、負圧−助勢限界圧マップより下に位置していれば)、第1記憶部26cに記憶されている負圧−助勢限界圧マップが実際のバキュームブースタ22の特性に対して上に位置したままであることがわかる。したがって、第1記憶部26cに記憶されている負圧−助勢限界圧マップを、実際のバキュームブースタ22の特性に対するずれ分だけ補正すればよい。
【0132】
そして、ブレーキECU26は、図18に示すステップ416において、第1記憶部26cに記憶されている負圧−助勢限界圧マップが、踏込解除時のデータ(負圧1,MC1)を通るように補正する。具体的には、ブレーキECU26は、図24に示すステップ706において、前述した比較結果に基づいて負圧−助勢限界圧マップの補正量を導出する。ブレーキECU26は、負圧−助勢限界圧マップから導出される、ブレーキペダル21の踏込解除時の負圧室R1の負圧に対応したマスタシリンダ圧(助勢限界圧)MCAと、踏込解除時のマスタシリンダ圧MC1との偏差(MCA−MC1)を補正量として導出する。
【0133】
さらに、ブレーキECU26は、ステップ706において、導出された補正量、および上記比較した踏込解除時のデータと負圧−助勢限界圧マップとの位置関係に基づいて、上記比較した負圧−助勢限界圧マップから新しい負圧−助勢限界圧マップを導出する。具体的には、補正前のαに偏差(MCA−MC1)を加えた値を新しいαとすることで、負圧−助勢限界圧マップを、導出された補正量だけ下方に移動させることで新しい負圧−助勢限界圧マップ(図26にて一点破線で示す補正後マップ)に補正する。
【0134】
また、ブレーキECU26は、第1記憶部26cで記憶されている負圧−助勢限界圧マップと、ブレーキペダル21の踏込時にてバキュームブースタ22の実際の助勢限界を超えていなかったと判別された踏込解除時のデータ(負圧1,MC1)と、を比較する(ステップ422)。この際、その踏込解除時のデータが領域IIに属するか否か(すなわち、負圧−助勢限界圧マップより上に位置するか否か)を判定する。
【0135】
すなわち、ブレーキECU26は、図25に示す領域II判定・補正ルーチンを実行する。ブレーキECU26は、ステップ712において、上記ステップ702と同様に、第1記憶部26cで記憶されている負圧−助勢限界圧マップを示す式MCA=A×負圧−αに踏込解除時に取得した負圧1を代入し、負圧1におけるマスタシリンダ圧を導出する。そして、ブレーキECU26は、ステップ714において、ステップ712で負圧−助勢限界圧マップから導出した踏込解除時の負圧である負圧1におけるマスタシリンダ圧MCAと、踏込解除時に取得したマスタシリンダ圧MC1と、を比較する。ブレーキECU26は、MC1がMCAより大きい場合には、踏込解除時のデータが領域IIに属すると判定し、MC1がMCAより小さい場合には、踏込解除時のデータが領域II以外である(領域Iに属する)と判定する。
【0136】
ここで、第1記憶部26cに記憶されている負圧−助勢限界圧マップに対して実際のバキュームブースタ22の特性が上にずれた場合においては、バキュームブースタ22の実際の助勢限界を超えていなかった踏込解除時のデータのマスタシリンダ圧が、踏込解除時の負圧において記憶されている負圧−助勢限界圧マップより上に位置する場合が発生する。第1記憶部26cに記憶されている負圧−助勢限界圧マップに対して実際のバキュームブースタ22の特性が上にずれているからである。
【0137】
このことを利用して、図27で示すように、第1記憶部26cで記憶されている負圧−助勢限界圧マップ(補正前マップ)に対して、ブレーキペダル21の踏込時にてバキュームブースタ22の実際の助勢限界を超えていなかったと判別された踏込解除時のデータ(負圧1,MC1)が領域IIに属していれば(すなわち、負圧−助勢限界圧マップより上に位置していれば)、第1記憶部26cに記憶されている負圧−助勢限界圧マップが実際のバキュームブースタ22の特性に対して下に位置したままであることがわかる。したがって、第1記憶部26cに記憶されている負圧−助勢限界圧マップを、実際のバキュームブースタ22の特性に対するずれ分だけ補正すればよい。
【0138】
そして、ブレーキECU26は、図18に示すステップ424において、第1記憶部26cに記憶されている負圧−助勢限界圧マップが、踏込解除時のデータ(負圧1,MC1)を通るように補正する。具体的には、ブレーキECU26は、図25に示すステップ716において、前述した比較結果に基づいて負圧−助勢限界圧マップの補正量を導出する。ブレーキECU26は、負圧−助勢限界圧マップから導出される、ブレーキペダル21の踏込解除時の負圧室R1の負圧に対応したマスタシリンダ圧(助勢限界圧)MCAと、踏込解除時のマスタシリンダ圧MC1との偏差(MC1−MCA)を補正量として導出する。
【0139】
さらに、ブレーキECU26は、ステップ716において、導出された補正量、および上記比較した踏込解除時のデータと負圧−助勢限界圧マップとの位置関係に基づいて、上記比較した負圧−助勢限界圧マップから新しい負圧−助勢限界圧マップを導出する。具体的には、補正前のαに偏差(MC1−MCA)を加えた値を新しいαとすることで、負圧−助勢限界圧マップを、導出された補正量だけ上方に移動させることで新しい負圧−助勢限界圧マップ(図27の補正後マップ)に補正する。
【0140】
なお、判別手段は、ブレーキ操作部材(ブレーキペダル)21の踏込解除時点以降における負圧室R1の負圧の変化から、ブレーキ操作部材21の踏込時にてバキュームブースタ22の実際の助勢限界を超えていたか否かを判別する。本実施の形態では、判別手段は、上述したデータ判別部26gである。すなわち、データ判別部26gは、ブレーキペダル21の踏込解除時点以降において、負圧室R1の負圧が一旦増大して元に戻れば、バキュームブースタ22の実際の助勢限界を超えてブレーキペダル21が踏込まれた後に該踏込みが解除されたと判定することで、ブレーキペダル21の踏込解除時の前記データが、ブレーキペダル21の踏込時にてバキュームブースタ22の実際の助勢限界を超えていたデータであると判別する(ブレーキ操作部材21の踏込時にてバキュームブースタ22の実際の助勢限界を超えていたと判別する)。一方、データ判別部26gは、ブレーキペダル21の踏込解除時点以降において、前記負圧室の負圧が減少すれば、バキュームブースタ22の実際の助勢限界を超えないでブレーキペダル21が踏込まれた後に該踏込みが解除されたと判定することで、ブレーキペダル21の踏込解除時の前記データが、ブレーキペダル21の踏込時にてバキュームブースタ22の実際の助勢限界を超えていなかったデータであると判別する(ブレーキ操作部材21の踏込時にてバキュームブースタ22の実際の助勢限界を超えていなかったと判別する)。
【0141】
また、補正手段は、バキュームブースタ22の助勢限界に対応したマスタシリンダ23の圧力限界である助勢限界圧に応じた基準値を判別手段の判別結果に基づいて補正する。本実施の形態では、補正手段は、上述した比較部26h、補正量導出部26i、マップ導出部26jを有している。本実施の形態では負圧−助勢限界圧マップを前記基準値としている。また、駆動手段は、マスタシリンダ圧取得手段で取得されたマスタシリンダ圧が基準値以上である場合、油圧ポンプ44a,54aを駆動させる。本実施の形態では、駆動手段は、上述した助勢制御部26eである。
【0142】
上述した説明から明らかなように、本実施の形態によれば、記憶手段(26c)には、負圧室R1の任意の負圧と、その負圧における該バキュームブースタ22の助勢限界に対応したマスタシリンダ23の圧力である助勢限界圧との関係を示す負圧−助勢限界圧マップ(図11)が記憶されている。補正手段(26,26f−26j、図18のフローチャート)が、負圧−助勢限界圧マップと、ブレーキ操作部材21の踏込時にてバキュームブースタ22の実際の助勢限界を超えていたか否かに判別された、ブレーキ操作部材21の踏込解除時に取得した負圧とマスタシリンダ圧からなるデータと、を取得した負圧において比較し、該比較結果に基づいて負圧−助勢限界圧マップを補正する。更新手段(26,26k)が、補正手段により補正された新しい負圧−助勢限界圧マップを記憶手段に記憶させる。判定用助勢限界圧演算手段(26d、ステップ106)が、負圧取得手段(26a、ステップ104)で取得された負圧と負圧−助勢限界圧マップとから求められる助勢限界圧を判定用助勢限界圧として演算する。助勢制御手段(26e、ステップ108−112)が、マスタシリンダ圧取得手段(26b、ステップ102)で取得されたマスタシリンダ圧が判定用助勢限界圧演算手段で演算された判定用助勢限界圧以上である場合、油圧ポンプ44a,54aを駆動させその駆動により形成されるブレーキ液圧をブレーキ操作部材21の操作に応じて形成されたマスタシリンダ圧に加圧することで、ブレーキ操作部材の操作に応じた目標ブレーキ液圧をホイールシリンダWC**に供給する助勢制御を行う。
【0143】
なお、補正手段は、助勢限界圧の基準値(負圧−助勢限界マスタシリンダ圧特性に相当する基準値)として、負圧室R1の任意の負圧と、その負圧におけるバキュームブースタ22の助勢限界に対応したマスタシリンダ23の圧力である助勢限界圧との関係を示す負圧−助勢限界圧マップ(図11)が記憶されている記憶手段(26c)を備え、補正手段が、負圧−助勢限界圧マップと、ブレーキ操作部材21の踏込解除時に取得した負圧とマスタシリンダ圧からなるデータと、ブレーキ操作部材21の踏込時におけるバキュームブースタ22の実際の助勢限界を超えていたか否かの判別結果とに基づいて負圧−助勢限界圧マップを補正する。そして、補正手段により補正された新しい負圧−助勢限界圧マップを記憶手段に記憶させる。
【0144】
これによれば、負圧−助勢限界圧マップは、ブレーキ操作部材21の踏込時にてバキュームブースタ22の実際の助勢限界を超えていたか否かに判別された、ブレーキ操作部材21の踏込解除時に取得した負圧とマスタシリンダ圧からなるデータを使用して補正される。したがって、負圧−助勢限界圧マップを1種類だけを使用して、そのマップを多数のブレーキ装置に適用する場合、当初、そのマップがそのバキュームブースタ22の実際の負圧−助勢限界圧特性と異なっていても、本発明に係る補正により当初マップが実際の負圧−助勢限界圧特性となるように補正することができる。また、当初、負圧−助勢限界圧マップがバキュームブースタ22の実際の負圧−助勢限界圧関係と一致していたが、経時変化により実際の負圧−助勢限界圧特性が変化した場合でも、本発明に係る補正により当初マップが実際の負圧−助勢限界圧特性となるように補正することができる。このように、バキュームブースタ22の負圧−助勢限界圧特性にバラツキがあってもあるいは事後的に発生しても、その特性に相当する負圧−助勢限界圧マップを適正に補正することで、負圧−助勢限界圧マップが実際の負圧−助勢限界圧関係と乖離するのを抑制することができる。したがって、助勢制御の開始(油圧ポンプ44a,54aの駆動開始)を判定する判定用助勢限界圧を、適正に補正された負圧−助勢限界圧マップに基づいて適切に導出することができ、ひいては、適切なタイミングで助勢制御を開始させることができる。つまり、バキュームブースタ22の特性バラツキの影響をできるだけ抑制して、ブレーキ装置Aに所望のブレーキ性能を十分に発揮させることができる。また、判定用助勢限界圧を、導出時に演算することなしに適正に補正された負圧−助勢限界圧マップに基づいて適切に導出することができる。
【0145】
また、負圧−助勢限界圧特性の基準値(負圧−助勢限界圧マップ)は、ブレーキ操作部材21の踏込み解除時の負圧変化からブレーキ操作部材21の踏込時にてバキュームブースタ22の実際の助勢限界を超えていたか否かを判別し、ブレーキ操作部材21の踏込解除時に取得した負圧とマスタシリンダ圧からなるデータを使用して補正される。したがって、制御の開始(油圧ポンプ44a,54aの駆動開始)を判定する判定用助勢限界圧を、実際の負圧助勢限界の結果によって適正に補正された負圧−助勢限界圧の基準値に基づいて適切に導出することができ、ひいては、適切なタイミングで助勢制御を開始させることができる。つまり、バキュームブースタ22の特性バラツキの影響をできるだけ抑制して、ブレーキ装置Aに所望のブレーキ性能を十分に発揮させることができる。
【0146】
また、補正手段は、ブレーキ操作部材21の踏込解除時のデータが、ブレーキ操作部材21の踏込時にてバキュームブースタ22の実際の助勢限界を超えていたと判別されたものであって、負圧−助勢限界圧マップより下方に位置する場合、負圧−助勢限界圧マップから導出される、ブレーキ操作部材の踏込解除時の負圧室R1の負圧に対応した助勢限界圧と、踏込解除時のマスタシリンダ圧との偏差を補正量として導出し、負圧−助勢限界圧マップを補正量だけ下方に移動させることで補正する(ステップ414,416)。これにより、実際の負圧−助勢限界圧特性が、記憶手段に記憶されている負圧−助勢限界圧マップより下方にずれているか或いは事後的にずれた場合であっても、負圧−助勢限界圧マップを適切に補正することができる。
【0147】
また、補正手段は、ブレーキ操作部材21の踏込解除時点以降において、負圧室R1の負圧が一旦増大して元に戻れば、バキュームブースタ22の実際の助勢限界を超えてブレーキ操作部材21が踏込まれた後に該踏込みが解除されたと判定することで、ブレーキ操作部材21の踏込解除時のデータが、ブレーキ操作部材21の踏込時にてバキュームブースタ22の実際の助勢限界を超えていたものであると判別される(ステップ410,412)。これにより、従来から検出していた負圧に基づいて、ブレーキ操作部材21の踏込解除時のデータが、ブレーキ操作部材21の踏込時にてバキュームブースタ22の実際の助勢限界を超えていたものであると判別することができる。したがって、別の検出手段を設けなくてすむので、コスト上昇、構造複雑化、大型化を招くことなく、かつ確実に前記判別を行うことができる。
【0148】
また、補正手段は、ブレーキ操作部材21の踏込解除時のデータが、ブレーキ操作部材21の踏込時にてバキュームブースタ22の実際の助勢限界を超えていなかったと判別されたものであって、負圧−助勢限界圧マップより上方に位置する場合、負圧−助勢限界圧マップから導出される、ブレーキ操作部材21の踏込解除時の負圧室R1の負圧に対応した助勢限界圧と、踏込解除時のマスタシリンダ圧との偏差を補正量として導出し、負圧−助勢限界圧マップを補正量だけ上方に移動させることで補正する(ステップ422)。これにより、実際の負圧−助勢限界圧特性が、記憶手段に記憶されている負圧−助勢限界圧マップより上方にずれているか或いは事後的にずれた場合であっても、負圧−助勢限界圧マップを適切に補正することができる。
【0149】
また、補正手段は、ブレーキ操作部材21の踏込解除時点以降において、負圧室R1の負圧が減少すれば、バキュームブースタ22の実際の助勢限界を超えないでブレーキ操作部材21が踏込まれた後に該踏込みが解除されたと判定することで、ブレーキ操作部材21の踏込解除時のデータが、ブレーキ操作部材21の踏込時にてバキュームブースタ22の実際の助勢限界を超えていなかったものであると判別される(ステップ418,420)。これにより、従来から検出していた負圧に基づいて、ブレーキ操作部材21の踏込解除時のデータが、ブレーキ操作部材21の踏込時にてバキュームブースタ22の実際の助勢限界を超えていなかったものであると判別することができる。したがって、別の検出手段を設けなくてすむので、コスト上昇、構造複雑化、大型化を招くことなく、かつ確実に前記判別を行うことができる。
【0150】
また、補正手段は、マスタシリンダ圧が減少すれば、ブレーキ操作部材21の踏込が解除されたと判定する(ステップ406、図19のフローチャート)。これにより、ブレーキ操作部材21の踏込解除判定を正確かつ的確に行うことができる。
【0151】
また、補正手段は、ブレーキ操作部材21のストローク量が減少すれば、ブレーキ操作部材21の踏込が解除されたと判定する。これにより、ブレーキ操作部材21の踏込解除判定を正確かつ的確に行うことができる。
【0152】
なお、上述した実施の形態において、補正手段は、導出した補正量を複数記憶し、それら複数の補正量に基づいて補正量を導出し、その導出した補正量に基づいて負圧−助勢限界圧マップを補正するようにしてもよい。具体的には、図18のフローチャートに代えて図28のフローチャートを実施するようにすればよい。すなわち、ブレーキECU26は、図18のステップ416,418の処理に代えて、ステップ730,732において補正量を算出して記憶する。このとき、ブレーキECU26は、ステップ416,416の処理中の補正量の算出処理を行って、その補正量を記憶する。その後、ブレーキECU26は、補正量を所定の個数だけ記憶すると、ステップ734で「YES」と判定し、ステップ736で記憶されている所定個数の補正量に基づく平均補正量を補正量として算出する。そして、ブレーキECU26は、上記ステップ416(または424)と同様に、ステップ738にてその補正量(平均補正量)を使用して負圧−助勢限界圧マップを補正する。これにより、精度のよい信頼性のある補正量を導出することができ、ひいては負圧−助勢限界圧マップを精度よく信頼性高い補正することができる。
【0153】
また、上述した実施の形態において、ブレーキ操作部材21の解除時に取得した負圧およびマスタシリンダ圧からなるデータが負圧−助勢限界圧マップを基準とした所定範囲外に位置すれば、補正手段は補正量の導出を禁止し補正を行わないようにしてもよい。具体的には、図24のフローチャートに代えて図29のフローチャートを実施するようにすればよい。すなわち、ブレーキEUC26は、ステップ702〜706の処理に加えて、ステップ742〜748の処理を行う。ステップ742において、ブレーキECU26は、第1記憶部26cで記憶されている負圧−助勢限界圧マップの上限範囲を示す式MCE1=A×負圧−(α−β)(図30参照)に踏込解除時に取得した負圧1を代入し、負圧1における(踏込解除時の負圧における)マスタシリンダ圧を導出する。ステップ744において、ブレーキECU26は、第1記憶部26cで記憶されている負圧−助勢限界圧マップの下限範囲を示す式MCE2=A×負圧−(α+β)(図30参照)に踏込解除時に取得した負圧1を代入し、負圧1における(踏込解除時の負圧における)マスタシリンダ圧を導出する。βは上記所定範囲を規定する値である。
【0154】
ステップ746において、ブレーキECU26は、ステップ742で導出した踏込解除時の負圧である負圧1におけるマスタシリンダ圧MCE1と、踏込解除時に取得したマスタシリンダ圧MC1と、を比較する。ステップ748において、ブレーキECU26は、ステップ744で導出した踏込解除時の負圧である負圧1におけるマスタシリンダ圧MCE2と、踏込解除時に取得したマスタシリンダ圧MC1と、を比較する。踏込解除時に取得したマスタシリンダ圧MC1が、マスタシリンダ圧MCE1とマスタシリンダ圧MCE2の間にあれば、さらにマスタシリンダ圧MC1が領域Iにあれば補正量を算出し(ステップ706)、マスタシリンダ圧MCE1とマスタシリンダ圧MCE2の間になければ、補正量の算出を行わず補正を行わない。なお、図25のフローチャートも同様に図24のフローチャートと同様に変更するようにしてもよい。
【0155】
これにより、信頼性の高い前記データのみを適切に選択して使用することで、精度のよいマップに補正することができ、ひいては、より正確な制御をおこなうことができる。
【0156】
また、上述した実施の形態においては、負圧源の負圧供給状態の正常・異常を検出する負圧供給状態検出手段をさらに備え、負圧供給状態検出手段が負圧供給状態が異常である旨を検出すれば、補正手段は補正量の導出を禁止し補正を行わないようにしてもよい。具体的には、ブレーキECU26は、図31に示すフローチャートを実行する。すなわち、ブレーキECU26は、ステップ750において、負圧源の負圧供給状態が正常であるか否かを判定する。例えば、負圧源がエンジン11である場合、エンジンECU17からの情報から正常であるか否かを判定する。負圧源の負圧供給状態が正常である場合には、ブレーキECU26は、ステップ750で「YES」と判定し、負圧−助勢限界圧マップの補正を許可する(ステップ752)。一方、負圧源の負圧供給状態が異常である場合には、ブレーキECU26は、ステップ750で「NO」と判定し、負圧−助勢限界圧マップの補正を禁止する(ステップ754)。これにより、信頼性の低い前記データを予め排除することで、信頼性の低いデータを処理する無駄な制御を行うことなく、精度のよいマップに補正することができ、ひいては、より正確な制御をおこなうことができる。
【0157】
なお、本実施の形態では、負圧−助勢限界圧特性をマップとし、マップの値を補正しているが、例えば、負圧−助勢限界圧特性を、負圧を変数とする演算式で求めるものとし、その係数や偏差を補正し、結果的に演算結果となる基準値を補正するものであってもよい。この場合、本実施の形態と同様に、踏込み解除時の負圧と前記演算式で求めた助勢限界圧と、踏込み解除時のマスタシリンダ圧との偏差を前記演算式の偏差に加算(減算)して補正するようにしてもよいし、補正の度に予め決められた定数を偏差に加算(減算)するようにして補正してもよい。
【符号の説明】
【0158】
11…エンジン、12…変速機、13…ディファレンシャル、15a…スロットルバルブ、15b…モータ、15c…スロットル開度センサ、16…アクセルペダル、16a…アクセル開度センサ、17…エンジンECU、21…ブレーキペダル、22…バキュームブースタ、22f2…負圧センサ(負圧検出手段)、23…マスタシリンダ、23a,23b…第1および第2液圧室、23c,23d…第1および第2出力ポート、24…リザーバタンク、25…ブレーキアクチュエータ、25a1…マスタシリンダ圧センサ(マスタシリンダ圧検出手段)、26…ブレーキECU(制御装置)、26a…負圧取得部(負圧取得手段)、26b…マスタシリンダ圧取得部(マスタシリンダ圧取得手段)、26c…記憶部(記憶手段)、26d…判定用助勢限界圧演算部(判定用助勢限界圧演算手段)、26e…助勢制御部(助勢制御手段)、26f…踏込解除時の負圧、マスタシリンダ圧導出部、26g…データ判別部、26h…比較部、26i…補正量導出部、26j…マップ導出部、26k…マップ更新部(更新手段)、41,51…差圧制御弁、42a,43a,52a,53a…増圧弁、42b,43b,52b,53b…減圧弁、44c,54c…調圧リザーバ、44a,54a…ポンプ(油圧ポンプ)、A…液圧ブレーキ装置、Wfl,Wfr,Wrl,Wrr…車輪、Sfl,Sfr,Srl,Srr…車輪速センサ、WCfl,WCfr,WCrl,WCrr…ホイールシリンダ。
【技術分野】
【0001】
本発明は、ブレーキ装置に関するものである。
【背景技術】
【0002】
ブレーキ装置の一形式として、特許文献1に示されているものが知られている。特許文献1の図4に示されているように、ブレーキ装置においては、ステップS12では負圧センサで検出されたブースタ(バキュームブースタ)の負圧Pを読み込み、次にステップS14で検出された負圧Pからブースタの助勢限界である死点液圧(助勢限界マスタシリンダ液圧)の推定演算を行う。ステップS14では、特許文献1の図6に示すマップをブースタの検出負圧Pで参照し、検出負圧Pに応じた死点液圧(助勢限界マスタシリンダ液圧)を推定している。このマップは、ブースタの負圧に応じた死点液圧をプロットして作成したものである。次に、ステップS16で液圧センサで検出したマスタシリンダのブレーキ液圧(マスタシリンダ液圧)を読み込む。次に、ステップS18でこの検出したマスタシリンダ液圧が推定死点液圧を超えるか否かを判別する。ここで、マスタシリンダ液圧>推定死点液圧であればステップS22に進み、ポンプを駆動することにより、ホイールシリンダのブレーキ液圧のポンプによる加圧を行う。マスタシリンダ液圧≦推定死点液圧であればステップS20で通常のブースタ助勢動作を行って、この処理サイクルを終了する。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2000−127949号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
上述したブレーキ装置においては、特許文献1の図6に示すマップを使用して、ブースタ12の検出負圧Pに応じた死点液圧(助勢限界マスタシリンダ液圧)を推定している。このブレーキ装置においては、ブースタ12がメカ的なバラツキよる特性バラツキを有している。すなわち、このバラツキにより、同一負圧値でもブースタ12の実際の死点液圧がブースタ12ごとに異なるというおそれがあった。そうすると、前記マップを1種類だけを使用して、そのマップを多数のブレーキ装置に適用する場合には、そのマップを使用して推定された死点液圧がブースタ12の実際の死点液圧と乖離するおそれがあった。
【0005】
また、同一のブースタ12でも経時変化によりブースタ12の実際の死点液圧が変化するおそれがあった。そうすると、ブレーキ装置の使用当初は、マップを使用して推定された死点液圧がブースタ12の実際の死点液圧と一致していたが、使用期間が長期化すると乖離するおそれがあった。
【0006】
いずれの場合においても、推定された死点液圧がブースタ12の実際の死点液圧と乖離すると、実際にはブースタ12が助勢限界に到達していないのにポンプ48を作動させたり、逆に助勢限界に到達しているのにポンプ48を作動させていなかったりすることで(助勢制御の開始点がずれることで)ブレーキ装置に所望のブレーキ性能を十分に発揮させることができないおそれがあった。
【0007】
そこで、本発明は、ブレーキ装置において、バキュームブースタの負圧−助勢限界マスタシリンダ圧特性にバラツキがあっても、その特性に相当する基準値を適正に補正することで、特性バラツキの影響をできるだけ抑制して、ブレーキ装置に所望のブレーキ性能を十分に発揮させることを目的とする。
【課題を解決するための手段】
【0008】
上記の課題を解決するため、請求項1に係る発明の構成上の特徴は、ブレーキ操作部材の操作に応じたブレーキ液圧を形成するマスタシリンダと、負圧が供給されその負圧を利用することでブレーキ操作部材の操作力を助勢してマスタシリンダに出力するバキュームブースタと、マスタシリンダから供給されるブレーキ液圧の供給を受けて車両の各車輪に制動力を付与するホイールシリンダと、マスタシリンダとホイールシリンダを繋ぐ油圧経路に接続され、電動モータの出力により駆動されてブレーキ液圧を形成してマスタシリンダと独立してホイールシリンダに供給する油圧ポンプと、バキュームブースタの負圧室の負圧を取得する負圧取得手段と、マスタシリンダの圧力を取得するマスタシリンダ圧取得手段と、ブレーキ操作部材の踏込解除時点以降における負圧室の負圧の変化から、ブレーキ操作部材の踏込時にてバキュームブースタの実際の助勢限界を超えていたか否かを判別する判別手段と、バキュームブースタの助勢限界に対応したマスタシリンダの圧力限界である助勢限界圧に応じた基準値を判別手段の判別結果に基づいて補正する補正手段と、マスタシリンダ圧取得手段で取得されたマスタシリンダ圧が基準値以上である場合、油圧ポンプを駆動させる駆動手段と、を備えたことである。
【0009】
また、請求項2に係る発明の構成上の特徴は、請求項1において、補正手段は、助勢限界圧の基準値として、負圧室の任意の負圧と、その負圧における該バキュームブースタの助勢限界に対応したマスタシリンダの圧力である助勢限界圧との関係を示す負圧−助勢限界圧マップが記憶されている記憶手段を備え、負圧−助勢限界圧マップと、ブレーキ操作部材の踏込解除時に取得した負圧とマスタシリンダ圧からなるデータと、ブレーキ操作部材の踏込時におけるバキュームブースタの実際の助勢限界を超えていたか否かの判別結果に基づいて負圧−助勢限界圧マップを補正し、補正手段により補正された新しい負圧−助勢限界圧マップを記憶手段に記憶させる更新手段によって更新することである。
【0010】
また、請求項3に係る発明の構成上の特徴は、請求項2において、補正手段は、ブレーキ操作部材の踏込解除時のデータが、ブレーキ操作部材の踏込時にてバキュームブースタの実際の助勢限界を超えていたと判別されたものであって、負圧−助勢限界圧マップより下方に位置する場合、負圧−助勢限界圧マップから導出される、ブレーキ操作部材の踏込解除時の負圧室の負圧に対応した助勢限界圧と、踏込解除時のマスタシリンダ圧との偏差を補正量として導出し、負圧−助勢限界圧マップを補正量だけ下方に移動させることで補正することである。
【0011】
また、請求項4に係る発明の構成上の特徴は、請求項1乃至請求項3の何れか一項において、補正手段は、ブレーキ操作部材の踏込解除時点以降において、負圧室の負圧が一旦増大して元に戻れば、バキュームブースタの実際の助勢限界を超えてブレーキ操作部材が踏込まれた後に該踏込みが解除されたと判定することで、ブレーキ操作部材の踏込解除時のデータが、ブレーキ操作部材の踏込時にてバキュームブースタの実際の助勢限界を超えていたものであると判別されることである。
【0012】
また、請求項5に係る発明の構成上の特徴は、請求項2乃至請求項4の何れか一項において、補正手段は、ブレーキ操作部材の踏込解除時のデータが、ブレーキ操作部材の踏込時にてバキュームブースタの実際の助勢限界を超えていなかったと判別されたものであって、負圧−助勢限界圧マップより上方に位置する場合、負圧−助勢限界圧マップから導出される、ブレーキ操作部材の踏込解除時の負圧室の負圧に対応した助勢限界圧と、踏込解除時のマスタシリンダ圧との偏差を補正量として導出し、負圧−助勢限界圧マップを補正量だけ上方に移動させることで補正することである。
【0013】
また、請求項6に係る発明の構成上の特徴は、請求項1乃至請求項5の何れか一項において、補正手段は、ブレーキ操作部材の踏込解除時点以降において、負圧室の負圧が減少すれば、バキュームブースタの実際の助勢限界を超えないでブレーキ操作部材が踏込まれた後に該踏込みが解除されたと判定することで、ブレーキ操作部材の踏込解除時のデータが、ブレーキ操作部材の踏込時にてバキュームブースタの実際の助勢限界を超えていなかったものであると判別されることである。
【0014】
また、請求項7に係る発明の構成上の特徴は請求項3乃至請求項6の何れか一項において、補正手段は、導出した補正量を複数記憶し、それら複数の補正量に基づいて補正量を導出し、その導出した補正量に基づいて負圧−助勢限界圧マップを補正することである。
【0015】
また、請求項8に係る発明の構成上の特徴は、請求項2乃至請求項7の何れか一項において、ブレーキ操作部材の解除時に取得した負圧およびマスタシリンダ圧からなるデータが負圧−助勢限界圧マップを基準とした所定範囲外に位置すれば、補正手段は補正量の導出を禁止し補正を行わないことである。
【0016】
また、請求項9に係る発明の構成上の特徴は、請求項1乃至請求項8の何れか一項において、負圧源の負圧供給状態の正常・異常を検出する負圧供給状態検出手段をさらに備え、負圧供給状態検出手段が負圧供給状態が異常である旨を検出すれば、補正手段は補正量の導出を禁止し補正を行わないことである。
【発明の効果】
【0017】
上記のように構成した請求項1に係る発明においては、負圧−助勢限界圧特性の基準値は、ブレーキ操作部材の踏込み解除時の負圧変化からブレーキ操作部材の踏込時にてバキュームブースタの実際の助勢限界を超えていたか否かを判別し、ブレーキ操作部材の踏込解除時に取得した負圧とマスタシリンダ圧からなるデータを使用して補正される。したがって、制御の開始(油圧ポンプの駆動開始)を判定する判定用助勢限界圧を、実際の負圧助勢限界の結果によって適正に補正された負圧−助勢限界圧の基準値に基づいて適切に導出することができ、ひいては、適切なタイミングで助勢制御を開始させることができる。つまり、バキュームブースタの特性バラツキの影響をできるだけ抑制して、ブレーキ装置に所望のブレーキ性能を十分に発揮させることができる。
【0018】
上記のように構成した請求項2に係る発明においては、請求項1において、補正手段は、助勢限界圧の基準値として、負圧室の任意の負圧と、その負圧における該バキュームブースタの助勢限界に対応したマスタシリンダの圧力である助勢限界圧との関係を示す負圧−助勢限界圧マップが記憶されている記憶手段を備え、補正手段が、負圧−助勢限界圧マップと、ブレーキ操作部材の踏込解除時に取得した負圧とマスタシリンダ圧からなるデータと、ブレーキ操作部材の踏込時におけるバキュームブースタの実際の助勢限界を超えていたか否かの判別結果とに基づいて負圧−助勢限界圧マップを補正する。そして、補正手段により補正された新しい負圧−助勢限界圧マップを記憶手段に記憶させる。
これにより、負圧−助勢限界圧マップは、ブレーキ操作部材の踏込時にてバキュームブースタの実際の助勢限界を超えていたか否かに判別された、ブレーキ操作部材の踏込解除時に取得した負圧とマスタシリンダ圧からなるデータを使用して補正される。したがって、負圧−助勢限界圧マップを1種類だけを使用して、そのマップを多数のブレーキ装置に適用する場合、当初、そのマップがそのバキュームブースタの実際の負圧−助勢限界圧特性と異なっていても、本発明に係る補正により当初マップが実際の負圧−助勢限界圧特性となるように補正することができる。また、当初、負圧−助勢限界圧マップがバキュームブースタの実際の負圧−助勢限界圧関係と一致していたが、経時変化により実際の負圧−助勢限界圧特性が変化した場合でも、本発明に係る補正により当初マップが実際の負圧−助勢限界圧特性となるように補正することができる。このように、バキュームブースタの負圧−助勢限界圧特性にバラツキがあってもあるいは事後的に発生しても、その特性に相当する負圧−助勢限界圧マップを適正に補正することで、負圧−助勢限界圧マップが実際の負圧−助勢限界圧関係と乖離するのを抑制することができる。したがって、判定用助勢限界圧を、導出時に演算することなしに適正に補正された負圧−助勢限界圧マップに基づいて適切に導出することができる。
【0019】
上記のように構成した請求項3に係る発明においては、請求項2において、補正手段は、ブレーキ操作部材の踏込解除時のデータが、ブレーキ操作部材の踏込時にてバキュームブースタの実際の助勢限界を超えていたと判別されたものであって、負圧−助勢限界圧マップより下方に位置する場合、負圧−助勢限界圧マップから導出される、ブレーキ操作部材の踏込解除時の負圧室の負圧に対応した助勢限界圧と、踏込解除時のマスタシリンダ圧との偏差を補正量として導出し、負圧−助勢限界圧マップを補正量だけ下方に移動させることで補正する。これにより、実際の負圧−助勢限界圧特性が、記憶手段に記憶されている負圧−助勢限界圧マップより下方にずれているか或いは事後的にずれた場合であっても、負圧−助勢限界圧マップを適切に補正することができる。
【0020】
上記のように構成した請求項4に係る発明においては、請求項1乃至請求項3の何れか一項において、補正手段は、ブレーキ操作部材の踏込解除時点以降において、負圧室の負圧が一旦増大して元に戻れば、バキュームブースタの実際の助勢限界を超えてブレーキ操作部材が踏込まれた後に該踏込みが解除されたと判定することで、ブレーキ操作部材の踏込解除時のデータが、ブレーキ操作部材の踏込時にてバキュームブースタの実際の助勢限界を超えていたものであると判別される。これにより、従来から検出していた負圧に基づいて、ブレーキ操作部材の踏込解除時のデータが、ブレーキ操作部材の踏込時にてバキュームブースタの実際の助勢限界を超えていたものであると判別することができる。したがって、別の検出手段を設けなくてすむので、コスト上昇、構造複雑化、大型化を招くことなく、かつ確実に前記判別を行うことができる。
【0021】
上記のように構成した請求項5に係る発明においては、請求項2乃至請求項4の何れか一項において、補正手段は、ブレーキ操作部材の踏込解除時のデータが、ブレーキ操作部材の踏込時にてバキュームブースタの実際の助勢限界を超えていなかったと判別されたものであって、負圧−助勢限界圧マップより上方に位置する場合、負圧−助勢限界圧マップから導出される、ブレーキ操作部材の踏込解除時の負圧室の負圧に対応した助勢限界圧と、踏込解除時のマスタシリンダ圧との偏差を補正量として導出し、負圧−助勢限界圧マップを補正量だけ上方に移動させることで補正する。これにより、実際の負圧−助勢限界圧特性が、記憶手段に記憶されている負圧−助勢限界圧マップより上方にずれているか或いは事後的にずれた場合であっても、負圧−助勢限界圧マップを適切に補正することができる。
【0022】
上記のように構成した請求項6に係る発明においては、請求項1乃至請求項5の何れか一項において、補正手段は、ブレーキ操作部材の踏込解除時点以降において、負圧室の負圧が減少すれば、バキュームブースタの実際の助勢限界を超えないでブレーキ操作部材が踏込まれた後に該踏込みが解除されたと判定することで、ブレーキ操作部材の踏込解除時のデータが、ブレーキ操作部材の踏込時にてバキュームブースタの実際の助勢限界を超えていなかったものであると判別される。これにより、従来から検出していた負圧に基づいて、ブレーキ操作部材の踏込解除時のデータが、ブレーキ操作部材の踏込時にてバキュームブースタの実際の助勢限界を超えていなかったものであると判別することができる。したがって、別の検出手段を設けなくてすむので、コスト上昇、構造複雑化、大型化を招くことなく、かつ確実に前記判別を行うことができる。
【0023】
上記のように構成した請求項7に係る発明においては、請求項3乃至請求項6の何れか一項において、補正手段は、導出した補正量を複数記憶し、それら複数の補正量に基づいて補正量を導出し、その導出した補正量に基づいて負圧−助勢限界圧マップを補正する。これにより、精度のよい信頼性のある補正量を導出することができ、ひいては負圧−助勢限界圧マップを精度よく信頼性高い補正することができる。
【0024】
上記のように構成した請求項8に係る発明においては、請求項2乃至請求項7の何れか一項において、ブレーキ操作部材の解除時に取得した負圧およびマスタシリンダ圧からなるデータが負圧−助勢限界圧マップを基準とした所定範囲外に位置すれば、補正手段は補正量の導出を禁止し補正を行わない。これにより、信頼性の高い前記データのみを適切に選択して使用することで、精度のよいマップに補正することができ、ひいては、より正確な制御をおこなうことができる。
【0025】
上記のように構成した請求項9に係る発明においては、請求項1乃至請求項8の何れか一項において、負圧源の負圧供給状態の正常・異常を検出する負圧供給状態検出手段をさらに備え、負圧供給状態検出手段が負圧供給状態が異常である旨を検出すれば、補正手段は補正量の導出を禁止し補正を行わない。これにより、信頼性の低い前記データを予め排除することで、信頼性の低いデータを処理する無駄な制御を行うことなく、精度のよいマップに補正することができ、ひいては、より正確な制御をおこなうことができる。
【図面の簡単な説明】
【0026】
【図1】本発明による液圧ブレーキ装置を適用した車両の一実施の形態を示す概要図である。
【図2】図1に示す液圧ブレーキ装置の構成を示す概要図である。
【図3】図1に示すバキュームブースタの作動を説明するための図である。
【図4】図1に示すバキュームブースタの作動を説明するための図である。
【図5】図1に示すバキュームブースタの作動を説明するための図である。
【図6】図1に示すバキュームブースタの作動を説明するための図である。
【図7】図1に示すバキュームブースタの作動を説明するための図である。
【図8】図1に示すバキュームブースタの作動を説明するための図である。
【図9】図1に示すバキュームブースタの作動を説明するための図であり、上段、中段、下段にそれぞれ負圧、マスタシリンダ圧、ペダル踏力を示しており、左側のブレーキペダル21の踏込は、助勢限界圧(例えば、Pmc(3)であるとする。)を超えない場合を示し、右側のブレーキペダル21の踏込は、助勢限界圧(例えば、Pmc(3)であるとする。)を超えた場合を示している。
【図10】図1、図2に示す制御装置の構成を示す制御ブロック図である。
【図11】負圧−助勢限界圧マップ(初期マップ)を示す図である。
【図12】負圧毎におけるブレーキペダルの操作力とマスタシリンダ圧の関係を示す図である。
【図13】実ブレーキ液圧と目標ブレーキ液圧におけるブレーキペダルの操作力とマスタシリンダ圧の関係を示すとともに実ブレーキ液圧と目標ブレーキ液圧との差である目標差圧ΔPの関係を示す図である。
【図14】負圧毎におけるマスタシリンダ圧と目標差圧ΔPの関係を示す図である。
【図15】図1に示す制御装置にて実行される制御プログラム(助勢制御)のフローチャートである。
【図16】図15に示す終了処理ルーチンのフローチャートである。
【図17】図15に示す増圧制御ルーチンのフローチャートである。
【図18】図1に示す制御装置にて実行される制御プログラム(負圧−助勢限界圧マップ補正)のフローチャートである。
【図19】解除操作開始判定ルーチンのフローチャートである。
【図20】解除操作開始判定ルーチンの変形例のフローチャートである。
【図21】解除操作開始判定ルーチンの変形例のフローチャートである。
【図22】負圧増加判定ルーチンのフローチャートである。
【図23】負圧減少判定ルーチンのフローチャートである。
【図24】領域I判定・補正ルーチンのフローチャートである。
【図25】領域II判定・補正ルーチンのフローチャートである。
【図26】負圧−助勢限界圧マップを下方に補正する場合を説明する図である。
【図27】負圧−助勢限界圧マップを上方に補正する場合を説明する図である。
【図28】図1に示す制御装置にて実行される制御プログラム(負圧−助勢限界圧マップ補正)の変形例のフローチャートである。
【図29】領域I判定・補正ルーチンの変形例のフローチャートである。
【図30】領域I判定・補正ルーチンの変形例の作用を説明するための図である。
【図31】図1に示す制御装置にて実行される制御プログラム(負圧源が異常である場合にマップ補正を禁止する)のフローチャートである。
【発明を実施するための形態】
【0027】
以下、本発明に係るブレーキ装置の制御装置を適用した車両の一実施の形態を図面を参照して説明する。図1はその車両の構成を示す概要図であり、図2はブレーキ装置の構成を示す概要図である。この車両Mは、前輪駆動車であり、車体前部に搭載した駆動源であるエンジン11の駆動力が後輪でなく前輪に伝達される形式のものである。なお車両Mは前輪駆動車でなく、他の駆動方式の車両例えば後輪駆動車、四輪駆動車でもよい。
【0028】
車両Mは、エンジン11、変速機12、ディファレンシャル13および左右駆動軸14a,14bを備えており、エンジン11の駆動力は、変速機12で変速されディファレンシャル13および左右駆動軸14a,14bを経て駆動輪である左右前輪Wfl,Wfrにそれぞれ伝達される。エンジン11は、エンジン11の燃焼室内に空気を流入する吸気管11aを備えており、吸気管11a内には、吸気管11aの開閉量を調整して同吸気管11aを通過する空気量を調整するスロットルバルブ15aが設けられている。
【0029】
スロットルバルブ15aは、アクセルペダル16とスロットルバルブ15aがワイヤによって繋がれたワイヤ式でなく、電子制御式である。すなわち、スロットルバルブ15aは、エンジンECU(電子制御ユニット)17からの指令によるモータ15bの駆動によって開閉され、スロットルバルブ15aの開閉量はスロットル開度センサ15cによって検出されその検出信号がエンジンECU17に送信されており、エンジンECU17からの指令値となるようにフィードバック制御されている。エンジンECU17は、基本的にはアクセル開度センサ16aが検出するアクセルペダル16の踏込み量を受信してその踏込み量に応じたスロットルバルブ15aの開閉量に相当する指令値をモータ15bに送信する。また、エンジンECU17は、検出されたエンジン11の状態を受信してその状態を勘案して決定したスロットルバルブ15aの開閉量に相当する指令値をモータ15bに送信する。
【0030】
変速機12は、エンジン11の駆動力を変速して駆動輪に出力する自動変速機であり、複数段(例えば4速)の前進段と後進一段の変速段を有するものである。変速機12は、運転者により選択されたレンジに応じた変速段の範囲で車両負荷と車速に基づき、変速を行うようになっている。
【0031】
また、車両Mは、車両Mを制動させる液圧ブレーキ装置(ブレーキ装置)Aを備えている。液圧ブレーキ装置Aは、各ホイールシリンダWCfl,WCfr,WCrl,WCrr、ブレーキ操作部材であるブレーキペダル21、バキュームブースタ22、マスタシリンダ23、リザーバタンク24、液圧自動発生装置であるブレーキアクチュエータ25、およびブレーキ装置の制御装置であるブレーキECU26を備えている。
【0032】
各ホイールシリンダWCfl,WCfr,WCrl,WCrrは、各車輪Wfl,Wfr,Wrl,Wrrの回転をそれぞれ規制するものであり、各キャリパCLfl,CLfr,CLrl,CLrrに設けられている。各ホイールシリンダWCfl,WCfr,WCrl,WCrrに第1液圧である基礎液圧、第2液圧である補助液圧または第3液圧である制御液圧が供給されると、各ホイールシリンダWCfl,WCfr,WCrl,WCrrの各ピストン(図示省略)が摩擦部材である一対のブレーキパッド(図示省略)を押圧して各車輪Wfl,Wfr,Wrl,Wrrと一体回転する回転部材であるディスクロータDRfl,DRfr,DRrl,DRrrを両側から挟んでその回転を規制するようになっている。なお、本実施形態においては、ディスク式ブレーキを採用するようにしたが、ドラム式ブレーキを採用するようにしてもよい。
【0033】
バキュームブースタ22は、負圧供給装置(負圧源)であるエンジン11からの圧力である負圧の作用でブレーキペダル21の操作力に応じてブレーキペダル21の操作力を倍力することにより補助液圧(パワーピストンに生じた力により形成される液圧)を形成し、その補助液圧をホイールシリンダWCfl,WCfr,WCrl,WCrrに付与し、その補助液圧によって車輪Wfl,Wfr,Wrl,Wrrに第2摩擦制動力を発生させ得る装置である。
【0034】
具体的には、バキュームブースタ22(60)は、図3から図8に示すように、ハウジング61に、可動隔壁62aとバルブボデー62bを備えるパワーピストン62が組付けられていて、ハウジング61内が可動隔壁62aにより前方の負圧室(定圧室)R1と後方の変圧室R2とに区画されている。
【0035】
ハウジング61には、負圧室R1と負圧源(例えば、エンジン11の吸気管11a)とを連通させるための接続管22fが接続されている。この接続管22fには、バキュームブースタ22から吸気管11aへの気体の流れのみを許容する逆止弁22f1が設けられている。これにより、負圧源からの負圧が負圧室R1に供給され、負圧室R1は基本的に負圧源の負圧に維持されるようになっている。
【0036】
ハウジング61の前面には、マスタシリンダ23の後端が当接して固定されている。後述する出力軸68の先端部がマスタシリンダ23のピストン(図示省略)と連動するように連結されている。パワーピストン62の可動隔壁62aは、金属製で環状のプレート(図示省略)と、ゴム製で環状のダイアフラム(図示省略)とからなり、ハウジング61内にて前後方向(パワーピストン62の軸方向)へ移動可能に設置されている。
【0037】
パワーピストン62のバルブボデー62bは、可動隔壁62aの内周部に連結された樹脂製の中空体であって、円筒状に形成された中間部位にてハウジング61の後部に気密的かつ前後方向へ移動可能に組付けられている。バルブボデー62bは、ハウジング61の前部との間に介装されたリターンスプリング63によって後方に向けて付勢されている。
【0038】
また、バルブボデー62bには、前後方向にて貫通する段付の軸孔62b1が形成されている。この軸孔62b1の中間段部62cには、該中間段部62cを前後方向に貫通して中間段部62cの後方と負圧室R1を連通する連通孔62b2が形成されている。また、軸孔62b1の中間段部62c内壁面には、一対の溝62b3,62b4が前後方向に沿って形成されている。さらに、軸孔62b1の中間段部62cには、径方向に貫通して溝62b4と変圧室R2を連通する連通孔62b5が形成されている。
【0039】
中間段部62cの後端には、弁体66の負圧弁部66aに離座可能に着座する環状の負圧弁座62b6が形成されていて、この負圧弁座62b6と負圧弁部66aによって、負圧室R1と変圧室R2間を連通・遮断する負圧弁が構成されている。
【0040】
上記したバルブボデー62bの軸孔62b1には、入力軸64とプランジャ65と弁体66が同軸的に組付けられている。また、バルブボデー62bの前部には、反動部材67および出力軸(出力部材)68が同軸的に組付けられている。
【0041】
入力軸64は、バルブボデー62bに対して進退可能であり、球状先端部64aにてプランジャ65の受承連結部65aに関節状に連結されている。入力軸64の後端部は、ブレーキペダル21に連結されていて、ブレーキペダル21に作用する踏力を入力Fiとして前方に向けて受けるように構成されている。
【0042】
プランジャ65は、バルブボデー62bの軸孔62b1の中間段部62c内を前後方向に進退可能である。プランジャ65は、キー部材(図示省略)によって、バルブボデー62bに対する前後方向移動範囲を規定されている。プランジャ65には、径方向に貫通してバルブボデー62bに形成された一対の溝62b3,62b4を連通する連通孔65bが形成されている。
【0043】
プランジャ65の先端面は、反動部材67の後面に当接しており(当接可能なものも含む。)、反動部材67から出力Foの反力を部分的に受ける部分である。また、プランジャ65の後端には、環状大気弁部66bに離座可能に着座する環状の大気弁座65cが形成されていて、この大気弁座65cと環状大気弁部66bによって、変圧室R2と大気間を連通・遮断する大気弁が構成されている。
【0044】
反動部材67は、その後面の中央部位が後方に膨出変形可能なリアクションゴムディスクである。反動部材67は、出力軸68とバルブボデー62bとの変形可能な空間に収容されて、前面全体にて出力軸68の後端部後面に係合(当接)した状態にて、バルブボデー62bの前端部に組付けられている。この反動部材67は、その後面にて、プランジャ65の先端前面に常時当接または当接可能であるとともに、バルブボデー62bの円環状前端面に当接している。
【0045】
出力軸68は、反動部材67とともにバルブボデー62bの前部に前後方向へ移動可能に組付けられている。出力軸68の先端部は、マスタシリンダ23のピストンに押動可能に当接しており、制動作動時にはマスタシリンダ23のピストンから受ける反力が出力軸68を介して反動部材67に伝達するようになっている。
【0046】
負圧弁部66aと大気弁部66b(弁体66)は、圧縮スプリング69によって負圧弁座62b6と大気弁座65cに向けて(前方に向けて)付勢されている。
【0047】
このように構成されたバキュームブースタ22の動作について図3から図9を参照して説明する。図9において、左側に示すブレーキペダル21の踏込は、助勢限界圧(例えば、Pmc(3)であるとする。)を超えない場合を示し、右側に示すブレーキペダル21の踏込は、助勢限界圧(例えば、Pmc(3)であるとする。)を超えた場合を示している。
【0048】
まず、左側の場合について説明する。図3に示すように、ブレーキペダル21を踏んでいないとき(開放時;時刻t1に踏込が開始されるまで)は、プランジャ65と弁体66との間の大気弁は閉じて大気の導入が遮断されている。一方、バルブボデー62bと弁体66との間の負圧弁は開いている。このため、変圧室R2と負圧室R1は、連通孔62b5、溝62b4、連通孔65b、溝62b3、連通孔62b2を介して連通しているので、変圧室R2と負圧室R1は共に負圧状態にある。
【0049】
時刻t1に、ブレーキペダル21の踏込が開始されると、バキュームブースタ22は、図4に示すように、ブレーキペダル21の踏込開始により入力軸64が押し込まれると、プランジャ65がバルブボデー62bに先行して出力側(前方)に移動する。プランジャ65の移動にあわせて、まず負圧弁が閉じて、負圧室R1と変圧室R2が遮断される。続いて大気弁が開き、連通孔62b5、溝62b4を通して、負圧状態にあった変圧室R2に大気が導入される。すると、変圧室R2と負圧室R1の間に気圧差が発生し、この差圧によりバルブボデー62bが出力側に移動する。
【0050】
時刻t2から時刻t3までの間に、バキュームブースタ22の助勢限界圧Pmc(3)以下でブレーキペダル21(入力軸64)が保持された場合、バキュームブースタ22においては、図5に示すように、マスタシリンダ23から出力軸68への反力と、ドライバの直接の踏み込み圧力であるプランジャ65の圧力と変圧室R2と負圧室R1の差圧によって生じた圧力との合力とが釣り合う。この釣り合う位置が、ちょうどプランジャ65とバルブボデー62bの両方が弁体66に接触する位置となる。その為、変圧室R2への大気流入が止まり、一定の力をマスタシリンダ23へ加える状態が維持される。
【0051】
その後時刻t3に、図5の状態からブレーキペダル21の踏込が解除されてブレーキペダル21(入力軸64)が戻されると、図6に示すように、バルブボデー62bに先行してプランジャ65が入力側(後方)へ移動するため、大気弁が閉じたまま、負圧弁が開くこととなる。このため、変圧室R2と負圧室R1が連通され、変圧室R2の空気が負圧室R1へ導入される。変圧室R2の負圧は一瞬低下(気圧が上昇)するが、負圧源の負圧より負圧室R1の負圧が低くなる(気圧が高くなる)と、直ちに逆止弁(チェックバルブ)22f1が開かれる為、負圧室R1の負圧は負圧源の圧力に戻される。時刻t3から踏込が終了する(時刻t4)までの間、前述の負圧減増が繰り返される。
【0052】
次に、右側の場合について説明する。ブレーキペダル21の踏込開始時点から助勢限界圧を越えるまでは(時刻t11から時刻t12までは)、上述した時刻t1から時刻t2までと同様である。
【0053】
時刻t12から時刻t13までの間に、図7に示すように、助勢限界を超えて踏み込み保持すると、プランジャ65はバルブボデー62bに先行し大気弁が開いており、大気が変圧室R2に導入されるが、変圧室R2は助勢限界点で大気圧まで上昇してしまい、それ以上負圧室R1との差圧による力が増加しない。従って、バルブボデー62b(弁体66)は大気弁が閉じる位置まで移動できず、プランジャ65がバルブボデー62bに先行し、変圧室R2は大気と連通したままとなる。
【0054】
その後時刻t13に、図7の状態からブレーキペダル21が戻されると、図8に示すように、助勢限界になるまでは、負圧室R1と変圧室R2の間は負圧弁で遮断され、大気弁が開いたままとなる。このため、バルブボデー62bが入力側(後方)へ移動することにより、可動隔壁62aも入力側へ移動するため負圧室R1の容積が大きくなるが、負圧室R1は変圧室R2と遮断されているため、容積の増加によって負圧室R1の圧力が低下し、見かけ上の負圧が上昇する。この際、逆止弁22f1は閉じられるので、負圧源の負圧(可動隔壁62aが入力側へ移動開始する前の負圧)以上に負圧室R1の負圧が上昇することとなる。一方、変圧室R2の容積は小さくなるが、その分の大気は大気弁が開いているため、大気弁を通って大気吸入口62d側へ排出される。
【0055】
その後、ブレーキペダル21が戻され、バキュームブースタ22の助勢限界以下になると(時刻t14)、大気弁が閉じられ、負圧弁が開くために、変圧室R2と負圧室R1が連通し、変圧室R2の大気が負圧室R1に流れ込み、負圧室R1の負圧は一旦低下し、逆止弁22f1の作用によって、負圧源の負圧に直ちに戻される。
【0056】
また、液圧ブレーキ装置Aは、バキュームブースタ22に供給されている負圧すなわちエンジン11の吸気管11a内の負圧(接続管22f内の負圧)を検出する負圧センサ(負圧検出手段)22f2を備えており、この検出信号はブレーキECU26に送信されるようになっている。なお、負圧センサ22f2は、負圧室R1内の負圧を直接検出するように設けてもよい。
【0057】
マスタシリンダ23は、プッシュロッド22gからの入力を液圧(基礎液圧+補助液圧)に変換し、各ホイールシリンダWCfl,WCfr,WCrl,WCrrに供給する。すなわち、マスタシリンダ23は、ドライバによるブレーキペダル21の操作力(踏力)とその操作によりバキュームブースタ22のパワーピストン22bに発生する力との合力(バキュームブースタ22により倍力されたブレーキ操作力)を入力し、基礎液圧と補助液圧からなる液圧に変換して出力している。基礎液圧は、ブレーキペダル21の操作力(踏力)により形成される液圧分であり、補助液圧は、パワーピストン22bに発生する力により形成される液圧分である。なお、基礎液圧によって車輪Wfl,Wfr,Wrl,Wrrに第1摩擦制動力が発生される。
【0058】
リザーバタンク24は、ブレーキ液を貯蔵してマスタシリンダ23にそのブレーキ液を補給するものである。
【0059】
ブレーキアクチュエータ25は、マスタシリンダ23と各ホイールシリンダWCfl,WCfr,WCrl,WCrrとの間に設けられて、ブレーキペダル21の操作の有無に関係なく自動的に形成した制御液圧をホイールシリンダWCfl,WCfr,WCrl,WCrrに付与し、対応する車輪Wfl,Wfr,Wrl,Wrrに第3摩擦制動力を発生させ得る装置である。
【0060】
図2を参照してブレーキアクチュエータ25の構成を詳述する。ブレーキアクチュエータ25は、独立して作動する液圧回路である複数の系統から構成されている。具体的には、ブレーキアクチュエータ25は、X配管である第1系統25aと第2系統25bを有している。第1系統25aは、マスタシリンダ23の第1液圧室23aと左後輪Wrl,右前輪WfrのホイールシリンダWCrl,WCfrとをそれぞれ連通して、左後輪Wrl,右前輪Wfrの制動力制御に係わる系統である。第2系統25bは、マスタシリンダ23の第2液圧室23bと左前輪Wfl,右後輪WrrのホイールシリンダWCfl,WCrrとをそれぞれ連通して、左前輪Wfl,右後輪Wrrの制動力制御に係わる系統である。
【0061】
第1系統25aは、差圧制御弁41、左後輪液圧制御部42、右前輪液圧制御部43、および第1減圧部44を含んで構成されている。
【0062】
差圧制御弁41は、マスタシリンダ23と、左後輪液圧制御部42の上流部および右前輪液圧制御部43の上流部との間に介装されている常開リニア電磁弁である。この差圧制御弁41は、ブレーキECU26により連通状態(非差圧状態)と差圧状態を切り替え制御されるものである。差圧制御弁41は非通電して通常連通状態とされているが、通電して差圧状態(閉じる側)にすることによりホイールシリンダWCrl,WCfr側の液圧をマスタシリンダ23側の液圧よりも所定の制御差圧分高い圧力に保持することができる。この制御差圧はブレーキECU26により制御電流に応じて調圧されるようになっている。これにより、ポンプ44a,54aによる加圧を前提に制御差圧に相当する制御液圧が形成されるようになっている。
【0063】
左後輪液圧制御部42は、ホイールシリンダWCrlに供給する液圧を制御可能なものであり、2ポート2位置切換型の常開電磁開閉弁である増圧弁42aと2ポート2位置切換型の常閉電磁開閉弁である減圧弁42bとから構成されている。増圧弁42aは、差圧制御弁41とホイールシリンダWCrlとの間に介装されており、ブレーキECU26の指令にしたがって差圧制御弁41とホイールシリンダWCrlとを連通または遮断できるようになっている。減圧弁42bは、ホイールシリンダWCrlと調圧リザーバ44cとの間に介装されており、ブレーキECU26の指令にしたがってホイールシリンダWCrlと調圧リザーバ44cとを連通または遮断できるようになっている。これにより、ホイールシリンダWCrl内の液圧が増圧・保持・減圧され得るようになっている。
【0064】
右前輪液圧制御部43は、ホイールシリンダWCfrに供給する液圧を制御可能なものであり、左後輪液圧制御部42と同様に増圧弁43aと減圧弁43bとから構成されている。増圧弁43aおよび減圧弁43bがブレーキECU26の指令により制御されて、ホイールシリンダWCfr内の液圧が増圧・保持・減圧され得るようになっている。
【0065】
第1減圧部44は、ポンプ(油圧ポンプ)44a、ポンプ用モータ(電動モータ)44b、調圧リザーバ44cを含んで構成されている。ポンプ44aは、調圧リザーバ44c内のブレーキ液を汲み上げて、そのブレーキ液を差圧制御弁41と増圧弁42a,43aとの間に供給するようになっている。このポンプ44aは、ブレーキECU26の指令にしたがって駆動されるポンプ用モータ44bによって駆動されるようになっている。
【0066】
調圧リザーバ44cは、ホイールシリンダWCrl、WCfrから減圧弁42b、43bを介して抜いたブレーキ液を一旦溜めておく装置である。また、調圧リザーバ44cは、マスタシリンダ23と連通しており、調圧リザーバ44c内のブレーキ液が所定量以下である場合には、マスタシリンダ23からブレーキ液が供給される一方で、所定量より多い場合には、マスタシリンダ23からのブレーキ液の供給が停止されるようになっている。
【0067】
これにより、差圧制御弁41によって差圧状態が形成されるとともにポンプ44aが駆動されている場合(例えば、横滑り防止制御、トラクションコントロールなどの場合)、マスタシリンダ23から供給されているブレーキ液を調圧リザーバ44c経由で増圧弁42a,43aの上流に供給することができるようになっている。
【0068】
第2系統25bは、差圧制御弁51、左前輪液圧制御部52、右後輪液圧制御部53、および第2減圧部54を含んで構成されている。
【0069】
差圧制御弁51は、マスタシリンダ23と、左前輪液圧制御部52の上流部および右後輪液圧制御部53の上流部との間に介装されている常開リニア電磁弁である。この差圧制御弁51は、差圧制御弁41と同様に、ブレーキECU26によりホイールシリンダWCfl,WCrr側の液圧をマスタシリンダ23側の液圧に対してよりも所定の制御差圧分高い圧力に保持できるようになっている。
【0070】
左前輪液圧制御部52および右後輪液圧制御部53は、ホイールシリンダWCfl,WCrrに供給する液圧をそれぞれ制御可能なものであり、左後輪液圧制御部42と同様に、それぞれ増圧弁52aと減圧弁52b、増圧弁53aと減圧弁53bから構成されている。増圧弁52aと減圧弁52b、増圧弁53aと減圧弁53bがブレーキECU26の指令によりそれぞれ制御されて、ホイールシリンダWCfl内およびホイールシリンダWCrr内の液圧がそれぞれ増圧・保持・減圧され得るようになっている。
【0071】
第2減圧部54は、第1減圧部44と同様に、ポンプ(油圧ポンプ)54a、ポンプ用モータ44b(第1減圧部44と共用)、調圧リザーバ54cを含んで構成されている。ポンプ54aは、調圧リザーバ44cと同様な調圧リザーバ54c内のブレーキ液を汲み上げて、そのブレーキ液を差圧制御弁51と増圧弁52a,53aとの間に供給するようになっている。このポンプ54aは、ブレーキECU26の指令にしたがって駆動されるポンプ用モータ44bによって駆動されるようになっている。
【0072】
このように構成されたブレーキアクチュエータ25は、通常ブレーキの際には全ての電磁弁が非励磁状態にされて、ブレーキペダル21の操作力に応じたブレーキ液圧、すなわち基礎液圧+補助液圧をホイールシリンダWC**にそれぞれ供給できるようになっている。なお、**は、各輪に対応する添え字であって、fl,fr,rl,rrのいずれかであり、左前、右前、左後、右後を示している。以下の説明及び図面において同じである。
【0073】
また、ブレーキアクチュエータ25は、ポンプ用モータ44bすなわちポンプ44a,54aを駆動するとともに差圧制御弁41,51を励磁すると、マスタシリンダ23からの基礎液圧+補助液圧に制御液圧を加えたブレーキ液圧をホイールシリンダWC**にそれぞれ供給できるようになっている。
【0074】
さらに、ブレーキアクチュエータ25は、増圧弁42a,43a,52a,53a、および減圧弁42b,43b,52b,53bを制御することでホイールシリンダWC**の液圧を個別に調整できるようになっている。これにより、ブレーキECU26からの指示により、例えば、周知のアンチスキッド制御、前後制動力配分制御、横滑り防止制御(具体的には、アンダステア抑制制御、オーバステア抑制制御)、トラクションコントロール、車間距離制御等を達成できるようになっている。
【0075】
また、ブレーキアクチュエータ25には、マスタシリンダ23内のブレーキ液圧であるマスタシリンダ圧を検出する圧力センサ(マスタシリンダ圧検出手段)25a1が設けられており、この検出信号はブレーキECU26に送信されるようになっている。本実施の形態では、圧力センサ25a1は、第1系統25aであってマスタシリンダ23と差圧制御弁41との間に設けるようにしたが、第2系統25bの同等の位置に設けるようにしてもよい。
【0076】
また、液圧ブレーキ装置Aは、図1,2に示すように、ブレーキペダル21のストローク量を検出するペダルストロークセンサ21aを備えている。この検出信号はブレーキECU26に送信されるようになっている。ブレーキペダル21のストローク量はブレーキペダル21の操作状態を示すものであり、ペダルストロークセンサ21aはブレーキ操作状態検出手段である。
【0077】
また、液圧ブレーキ装置Aは、図1に示すように、車輪速度センサSfl,Sfr,Srl,Srrを備えている。車輪速度センサSfl,Sfr,Srl,Srrは、各車輪Wfl,Wfr,Wrl,Wrrの付近にそれぞれ設けられており、各車輪Wfl,Wfr,Wrl,Wrrの回転に応じた周波数のパルス信号をブレーキECU26に出力している。
【0078】
ブレーキECU26は、マイクロコンピュータ(図示省略)を有しており、マイクロコンピュータは、バスを介してそれぞれ接続された入出力インターフェース、CPU、RAMおよびROM(いずれも図示省略)を備えている。CPUは、図15〜図25のフローチャートに対応したプログラムを実行して、バキュームブースタ22に供給されている負圧が、所定制動力を発揮させる所定圧力に対して不足している場合、ブレーキアクチュエータ25を制御してその不足分を補ってブレーキペダル21の操作に応じた目標ブレーキ液圧をホイールシリンダWC**に供給する。
【0079】
ブレーキECU26は、液圧ブレーキ装置Aを制御する制御装置である。図10に示すように、ブレーキECU26は、バキュームブースタ22に供給されている負圧を負圧センサ22f2から取得する負圧取得部(負圧取得手段)26aと、マスタシリンダ23の圧力をマスタシリンダ圧センサ25a1から取得するマスタシリンダ圧取得部(マスタシリンダ圧取得手段)26bを有している。ブレーキECU26は、バキュームブースタ22に供給されている任意の負圧と、その負圧における該バキュームブースタ22の助勢限界に対応したマスタシリンダ23の圧力である助勢限界圧との関係を示す負圧−助勢限界圧マップが記憶されている第1記憶部(第1記憶手段)26cを有している。
【0080】
第1記憶部26cに予め記憶されている負圧−助勢限界圧マップは、図11に示すような初期マップである。初期マップは、設計値であり、シミュレーションで求めたり、実際の実験値に基づいて求めたりすることができる。負圧−助勢限界圧マップは、図12に示す負圧毎における操作力F1に対するマスタシリンダ圧の関係により求めることができる。
【0081】
バキュームブースタ22は、ブレーキペダル21の操作力F1がある値まで増加すると、変圧室R2の圧力が大気圧に達してしまい(変圧室R2に外気を導入しても負圧室R1と変圧室R2の圧力差が増加しなくなるため)、パワーピストン22bに生じる力F2のさらなる形成(増加)は行われなくなる。すなわち、変圧室R2の圧力が大気圧に到達するまでは、ブレーキペダル21の操作力F1にパワーピストン22bに生じる力F2を加えた合力が、バキュームブースタ22から出力される。一方、到達時点以降においては、その到達時点の力F2にブレーキペダル21の操作力F1の増加分のみを加算した合力が、バキュームブースタ22から出力される。変圧室R2の圧力が大気圧に到達した時点が、バキュームブースタ22が助勢限界に到達した時点である。換言すると、助勢限界とは、バキュームブースタ22が助勢機能をそれ以上発揮できなくなる限界(限度)のことであり、大気圧と負圧室R1の圧力差である負圧により決定される。
【0082】
このことから、任意の負圧において操作力F1を変化させてバキュームブースタ22の助勢限界に対応したマスタシリンダ圧を取得することで、その負圧における助勢限界圧を演算することができる。例えば、負圧がPnn(本実施の形態のブレーキ装置の目標ブレーキ液圧を得るための負圧)のときの助勢限界圧はPmc(n)であり、負圧がPnnより小さいPn3のときの助勢限界圧はPmc(3)であり、負圧がPn3より小さいPn2のときの助勢限界圧はPmc(2)であり、負圧がPn2より小さいPn1のときの助勢限界圧はPmc(1)である。なお、負圧が0のときには助勢限界は生じないで操作力F1がそのままマスタシリンダ圧となるので助勢限界圧は存在せず、すべての領域で助勢を行うことができない。
【0083】
このように演算された負圧とその負圧における助勢限界圧は一対一に関連付けができるので、関連付けられた複数のデータ(負圧,助勢限界圧)から図11に示す負圧−助勢限界圧マップを得ることができる。なお、助勢限界圧は、任意の負圧において操作力F1を変化させてバキュームブースタ22の助勢限界に対応したマスタシリンダ圧のことである。
【0084】
さらに、ブレーキECU26は、負圧取得部26aで取得された負圧と第1記憶部26cで記憶されている負圧−助勢限界圧マップとから求められる助勢限界圧を判定用助勢限界圧として演算する判定用助勢限界圧演算部(判定用助勢限界圧演算手段)26dを有している。なお、判定用助勢限界圧は、マスタシリンダ圧に基づいて助勢制御を開始するか否かを判定する際に使用する判定値である。
【0085】
さらに、ブレーキECU26は、マスタシリンダ圧取得部26bで取得されたマスタシリンダ圧が判定用助勢限界圧演算部26dで演算された判定用助勢限界圧以上である場合、ポンプ44a,54aを駆動させその駆動により形成されるブレーキ液圧をブレーキペダル21の操作に応じて形成されたマスタシリンダ圧に加圧することで、ブレーキペダル21の操作に応じた目標ブレーキ液圧をホイールシリンダWC**に供給する助勢制御を行う助勢制御部(助勢制御手段)26eを有している。
【0086】
ブレーキペダル21の操作力F1とホイールシリンダ圧(マスタシリンダ圧)との間には、図13に示すような関係がある。バキュームブースタ22に負圧が十分に供給されている場合には、ホイールシリンダWC**の目標ブレーキ液圧は、図13の一点破線で示すようになっている。この目標ブレーキ液圧は、上述したように、助勢限界を有している。この場合の助勢限界は、操作力F1がF1(n)のときに、ホイールシリンダ圧(=マスタシリンダ圧)がPwc(n)である。一方、バキュームブースタ22に負圧が前述した場合と比較して低下し(負圧がPn2のとき)、助勢限界が低くなった場合には、ホイールシリンダWC**に供給される実際のブレーキ液圧(実ブレーキ液圧)は、図13の実線で示すようになっている。この場合の助勢限界は、操作力F1がF1(n)より小さいF1(2)のときに、ホイールシリンダ圧(=マスタシリンダ圧)がPwc(n)より小さいPwc(2)である。ブレーキペダル21が操作されているとき、マスタシリンダ23からは基礎液圧と補助液圧が出力されているが、操作力F1が助勢限界に相当するF1(2)より小さい場合には、補助液圧は所望量(目標ブレーキ液圧に応じた補助液圧)だけを発生され、大きい場合には、補助液圧は前記所望量より小さい値しか発生することができない。そこで、大きい場合には、補助液圧の不足分を目標差圧ΔPとして定義し、補助液圧の不足分を制御液圧で補充するのである。
【0087】
図14に、負圧毎における実際のマスタシリンダ圧と目標差圧ΔPとの関係を示す。前述したことから、目標差圧ΔPは目標ブレーキ液圧と任意の負圧における実際のマスタシリンダ圧との差である。図14に示す関係においては、マスタシリンダ圧(ホイールシリンダ圧)が任意の負圧に対する実ブレーキ液圧の助勢限界に相当する値(負圧がPn2のとき、Pwc(2))に到達するまでは、バキュームブースタ22で助勢できるので目標差圧ΔPは0である。マスタシリンダ圧(ホイールシリンダ圧)が任意の負圧に対する実ブレーキ液圧の助勢限界に相当する値(負圧がPn2のとき、Pwc(2))以降であって目標ブレーキ液圧の助勢限界に相当する値Pwc(n)に到達するまでは、目標差圧ΔPはマスタシリンダ圧に比例して大きくなる値である。そして、マスタシリンダ圧(ホイールシリンダ圧)が目標ブレーキ液圧の助勢限界に相当する値Pwc(n)以降では、目標差圧ΔPは一定値である。
【0088】
また、負圧が小さくなるほど、目標ブレーキ液圧における助勢限界に相当するマスタシリンダ圧Pwc(n)に対するΔPが大きくなる。補助液圧の不足分が大きくなるため、制御液圧で補充する量を大きくする必要があるからである。図14において、負圧がPn2より小さいPn1である場合、そのときの関係(マスタシリンダ圧と目標差圧ΔPとの関係)は負圧がPn2のときの関係より上方に位置する。負圧がPn2より大きいPn3である場合、そのときの関係は負圧がPn2のときの関係より下方に位置する。さらに、マスタシリンダ圧がPwc(n)未満では、それらの傾きは同じである。
【0089】
なお、図14に示す関係は、バキュームブースタ22の助勢限界到達後に、ホイールシリンダ圧が操作力F1に対して助勢限界到達前と同じ勾配でリニアに増加する関係が実現されるように設定されている。また、図14に示す関係は、設計値でありブレーキECU26に予め記憶されているものである。
【0090】
一方、ブレーキECU26は、負圧−助勢限界圧マップと、ブレーキペダル21の踏込時にてバキュームブースタ22の実際の助勢限界を超えていたか否かに判別された、ブレーキペダル21の踏込解除時に取得した負圧とマスタシリンダ圧からなるデータと、を取得した負圧において比較し、該比較結果に基づいて負圧−助勢限界圧マップを補正する。
【0091】
すなわち、ブレーキECU26は、踏込解除時の負圧およびマスタシリンダ圧導出部(以下、導出部という。)26fと、データ判別部26gと、比較部26hと、補正量導出部26iと、マップ導出部26jと、マップ更新部26kとを備えている。
【0092】
導出部26fは、踏込中のブレーキペダル21の踏込が解除された時(踏込解除が開始された時)の負圧室R1の負圧およびマスタシリンダ23のマスタシリンダ圧を導出するものである。この導出部26fは、ブレーキペダル21の踏込が解除されたこと(踏込解除が開始されたこと)を判定する判定部を備えている。判定部は、マスタシリンダ圧取得部26bからマスタシリンダ圧を入力し、そのマスタシリンダ圧が今まで増加あるいはほぼ一定であったものが減少すれば、ブレーキペダル21の踏込が解除された(踏込解除が開始された)と判定する。そして、導出部26fは、判定部がブレーキペダル21の踏込が解除されたと判定した時点における、負圧室R1の負圧およびマスタシリンダ23のマスタシリンダ圧を取得する(記憶する)。この負圧室R1の負圧およびマスタシリンダ23のマスタシリンダ圧を、踏込解除時のデータという。
【0093】
なお、判定部は、マスタシリンダ圧の代わりに、ブレーキペダル21のストローク量をペダルストロークセンサ21aから取得し、そのストローク量が今まで増加あるいはほぼ一定であったものが減少すれば、ブレーキペダル21の踏込が解除されたと判定するようにしてもよい。
【0094】
データ判別部26gは、ブレーキペダル21の踏込解除時に取得した負圧とマスタシリンダ圧からなるデータを、ブレーキペダル21の踏込時にてバキュームブースタ22の実際の助勢限界を超えていたか否かに判別するものである。すなわち、データ判別部26gは、ブレーキペダル21の踏込解除時点以降における負圧室R1の負圧の変動に基づいてブレーキペダル21の踏込時にてバキュームブースタ22の実際の助勢限界を超えていたか否かに判別する。
【0095】
具体的には、データ判別部26gは、ブレーキペダル21の踏込解除時点以降において、負圧室R1の負圧が一旦増大して元に戻れば、バキュームブースタ22の実際の助勢限界を超えてブレーキペダル21が踏込まれた後に該踏込みが解除されたと判定することで、ブレーキペダル21の踏込解除時の前記データが、ブレーキペダル21の踏込時にてバキュームブースタ22の実際の助勢限界を超えていたデータであると判別する。
【0096】
これは、上記バキュームブースタ22の作動から理解できるように、バキュームブースタ22の実際の助勢限界を超えてブレーキペダル21が踏込まれ、その状態で踏み込みが保持された状態から、ブレーキペダル21が戻されると(踏込解除が開始されると)、負圧室R1の負圧が一旦増大し、その後、元の負圧に戻ることを利用するからである。
【0097】
一方、データ判別部26gは、ブレーキペダル21の踏込解除時点以降において、前記負圧室の負圧が減少すれば、バキュームブースタ22の実際の助勢限界を超えないでブレーキペダル21が踏込まれた後に該踏込みが解除されたと判定することで、ブレーキペダル21の踏込解除時の前記データが、ブレーキペダル21の踏込時にてバキュームブースタ22の実際の助勢限界を超えていなかったデータであると判別する。
【0098】
これは、上記バキュームブースタ22の作動から理解できるように、バキュームブースタ22の実際の助勢限界を超えないでブレーキペダル21が踏込まれ、その状態で踏み込みが保持された状態から、ブレーキペダル21が戻されると(踏込解除が開始されると)、負圧室R1の負圧が一旦減少し、その後、元の負圧に戻ることを利用するからである。
【0099】
比較部26hは、第1記憶部26cで記憶されている負圧−助勢限界圧マップと、ブレーキペダル21の踏込時にてバキュームブースタ22の実際の助勢限界を超えていたか否かに判別された、ブレーキペダル21の踏込解除時に取得した負圧とマスタシリンダ圧からなるデータと、を前記取得した負圧において比較するものである。
【0100】
このとき、比較部26hは、下記の場合に、前記比較を実行し、下記場合以外の場合には前記比較を実行しない。第1の場合が、ブレーキペダル21の踏込解除時のデータが、ブレーキペダル21の踏込時にてバキュームブースタ22の実際の助勢限界を超えていたと判別されたものであって、負圧−助勢限界圧マップより下方に位置する場合であり、第2の場合が、ブレーキペダル21の踏込解除時のデータが、ブレーキペダル21の踏込時にてバキュームブースタ22の実際の助勢限界を超えていなかったと判別されたものであって、負圧−助勢限界圧マップより上方に位置する場合である。
【0101】
補正量導出部26iは、比較部26hによる比較結果に基づいて負圧−助勢限界圧マップの補正量を導出するものである。具体的には、上記第1および第2のいずれの場合にも、補正量導出部26iは、負圧−助勢限界圧マップから導出される、ブレーキペダル21の踏込解除時の負圧室R1の負圧に対応した助勢限界圧と、踏込解除時のマスタシリンダ圧との偏差を補正量として導出する。
【0102】
マップ導出部26jは、補正量導出部26iにより導出された補正量、および比較部26hで比較したデータと負圧−助勢限界圧マップとの位置関係に基づいて、比較部26hで比較した負圧−助勢限界圧マップから新しい負圧−助勢限界圧マップを導出するものである。すなわち、比較部26hで比較した負圧−助勢限界圧マップが新しい負圧−助勢限界圧マップに補正される。具体的には、上記第1の場合には、マップ導出部26jは、比較部26hで比較した負圧−助勢限界圧マップを、補正量導出部26iで導出された補正量だけ下方に移動させることで新しい負圧−助勢限界圧マップに補正する。上記第2の場合には、マップ導出部26jは、比較部26hで比較した負圧−助勢限界圧マップを、補正量導出部26iで導出された補正量だけ上方に移動させることで新しい負圧−助勢限界圧マップに補正する。
【0103】
マップ更新部26kは、マップ導出部26jで導出された(補正された)新しい前記負圧−助勢限界圧マップを負圧−助勢限界圧マップとして第1記憶部26cに記憶させるものである。
【0104】
次に、上記のように構成した液圧ブレーキ装置の作動を図15〜図25のフローチャートに沿って説明する。まず、図15〜図17のフローチャートを参照して、ステップ102で取得されたマスタシリンダ圧がステップ106で演算された判定用助勢限界圧以上である場合、ポンプ44a,54aを駆動させその駆動により形成されるブレーキ液圧をブレーキペダル21の操作に応じて形成されたマスタシリンダ圧に加圧することで、ブレーキペダル21の操作に応じた目標ブレーキ液圧をホイールシリンダWC**に供給する助勢制御について説明する。
【0105】
ブレーキECU26は、例えば車両のイグニションスイッチ(図示省略)がオン状態にあるとき、上記フローチャートに対応したプログラムを所定の短時間(例えば10ミリ秒)毎に実行する。ブレーキECU26は、マスタシリンダ圧センサ25a1からマスタシリンダ圧を示すマスタシリンダ圧信号を取得し(ステップ102)、負圧センサ22f2から負圧を示す負圧信号を取得する(ステップ104)。そして、ブレーキECU26は、ステップ104で取得された負圧と第1記憶部26cで記憶されている負圧−助勢限界圧マップとから求められる助勢限界圧を判定用助勢限界圧として演算する(ステップ106)。
【0106】
続いて、ブレーキECU26は、バキュームブースタ22が助勢可能な状態にあるか否かを判定する(ステップ108)。具体的には、ブレーキECU26は、ステップ102で取得されたマスタシリンダ圧がステップ106で演算された判定用助勢限界圧以上であれば、バキュームブースタ22が助勢可能な状態ではないと判定し(「YES」と判定し)、逆に判定用助勢限界圧未満であれば、バキュームブースタ22が助勢可能な状態であると判定する(「NO」と判定する)。ここで、助勢可能な状態とは、バキュームブースタ22に供給されている負圧の作用により助勢が可能な状態のことをいう。
【0107】
バキュームブースタ22が助勢可能な状態である場合には、ブレーキECU26は、ステップ108で「NO」と判定し、終了処理を行う(ステップ110)。具体的には、ブレーキECU26は、図16のフローチャートに示すサブルーチンである終了処理に沿って増圧制御の終了処理を実行する。この終了処理ルーチンにおいては、ステップ202において、差圧制御弁41(または/および51)のソレノイドにそれをオフにする信号が出力されて、差圧制御弁41(または/および51)がオフされ(開状態とされ)、ステップ204において、ポンプ用モータ44bにそれをオフにする信号が出力されてポンプ用モータ44bがオフされポンプ44a(または/および54a)の駆動が停止される。以上でこの終了処理ルーチンの一回の実行が終了し、それにより、図15に示す助勢制御ルーチンの一回の実行も終了する。なお、図16に示す増圧制御の終了処理は、増圧制御を終了させる終了処理という作用だけなく、ブレーキペダル21の踏込開始から助勢限界に到達するまでの通常ブレーキの処理という作用も有する。通常ブレーキの処理とは、マスタシリンダ23からの液圧をホイールシリンダWC**にそのまま供給するため、差圧制御弁41(または/および51)の前後で差圧が生じないように開状態とすることである。
【0108】
一方、バキュームブースタ22が助勢可能な状態ではない場合には、ブレーキECU26は、ステップ108で「YES」と判定し、助勢制御を行う(ステップ112)。助勢制御は、ポンプ44a,54aを駆動させその駆動により形成されるブレーキ液圧をブレーキペダル21の操作に応じて形成されたマスタシリンダ圧に加圧することで、ブレーキペダル21の操作に応じた目標ブレーキ液圧をホイールシリンダWC**に供給する制御である(助勢制御手段)。
【0109】
具体的には、ブレーキECU26は、図17のフローチャートに示すサブルーチンである増圧制御に沿って助勢制御を実行する。ブレーキECU26は、ステップ302において、マスタシリンダ圧および負圧の今回値に基づき、今回のマスタシリンダ圧に増圧すべき液圧、すなわち、ホイールシリンダWC**の目標ブレーキ液圧と実際に発生しているホイールシリンダ圧(=マスタシリンダ圧)との差である目標差圧ΔPを演算する。
【0110】
そして、ブレーキECU26は、決定された目標差圧ΔPに応じ、差圧制御弁41(または/および51)のソレノイドに供給すべき電流値Iを決定する(ステップ306)。目標差圧ΔPとソレノイド電流値Iとの関係がブレーキECU26の記憶部(ROM)に記憶されており、その関係に従って目標差圧ΔPに対応するソレノイド電流値Iが決定されるのである。続いて、ブレーキECU26は、差圧制御弁41(または/および51)のソレノイドに、決定されたソレノイド電流値Iで電流を供給させることにより、差圧制御弁41(または/および51)を制御(差圧制御)する。
【0111】
その後、ブレーキECU26は、ポンプ用モータ44bにそれをONにする信号を出力する(ステップ308)。それにより、ポンプ44a(または/および54a)は、調圧リザーバ44c(または/および54c)から作動液を汲み上げ、作動液を各ホイールシリンダWC**に吐出し、その結果、各ホイールシリンダWC**にマスタシリンダ圧より目標差圧ΔPだけ高い液圧が発生させられる。
以上でこの増圧制御ルーチンの一回の実行が終了し、それにより、図15に示す助勢制御ルーチンの一回の実行も終了する。
【0112】
一方、ブレーキECU26は、上述した助勢制御で使用される負圧−助勢限界圧マップを補正して更新する。この補正更新処理について図18〜図25を参照して説明する。
【0113】
ブレーキECU26は、負圧−助勢限界圧マップと、ブレーキペダル21の踏込時にてバキュームブースタ22の実際の助勢限界を超えていたか否かに判別された、ブレーキペダル21の踏込解除時に取得した負圧とマスタシリンダ圧からなるデータと、を取得した負圧において比較し、該比較結果に基づいて負圧−助勢限界圧マップを補正する(補正手段)。
【0114】
ブレーキECU26は、図18に示すフローチャートにおいて、ブレーキペダル21の今回の操作行程の全行程に渡ってマスタシリンダ圧をマスタシリンダ圧センサ25a1から所定の短時間(例えば、10ミリ秒)毎に取得し、MC1として記憶する(ステップ402)。ブレーキECU26は、今回の操作行程の全行程に渡ってバキュームブースタ22の負圧室R1内の負圧(バキュームブースタ22に供給されている負圧でもよい)を負圧センサ22f2から所定の短時間(例えば、10ミリ秒)毎に取得し、負圧1として記憶する(ステップ404)。このように記憶されたMC1と負圧1は、同時に取得されたものを関連付けて1つのデータとして記憶されている。
【0115】
ブレーキECU26は、今回の操作行程において、踏込中のブレーキペダル21の踏込が解除された時(踏込解除が開始された時)の負圧室R1の負圧およびマスタシリンダ23のマスタシリンダ圧を導出(取得)する。まず、ブレーキECU26は、ブレーキペダル21の踏込が解除されたこと(踏込解除が開始されたこと)を判定する(ステップ406)。
【0116】
このとき、ブレーキECU26は、マスタシリンダ圧取得部26bからマスタシリンダ圧を入力し、そのマスタシリンダ圧が今まで増加あるいはほぼ一定であったものが減少すれば、ブレーキペダル21の踏込が解除された(踏込解除が開始された)と判定する(上記判定部と同様)。具体的には、ブレーキECU26は、図19に示す解除操作開始判定ルーチンを実行する。この解除操作開始判定ルーチンは所定の短時間(例えば10ミリ秒)毎に繰り返し実行される。
【0117】
ブレーキECU26は、今回取得したマスタシリンダ圧(MC圧)が前回取得したマスタシリンダ圧(MC圧)より小さい場合には、ステップ502で「YES」と判定し、解除操作が開始されたと判定する(ステップ504)。一方、ブレーキECU26は、今回取得したマスタシリンダ圧(MC圧)が前回取得したマスタシリンダ圧(MC圧)以上である場合には、ステップ502で「NO」と判定し、解除操作が開始されていないと判定する(ステップ508)。なお、ブレーキECU26は、ステップ506,510にて、今回取得したマスタシリンダ圧を前回取得したマスタシリンダ圧に更新する。また、一旦、解除操作が開始されたと判定した時点以降においては、次回の操作工程が開始されるまで、ブレーキペダル21の踏込が解除されたこと(踏込解除が開始されたこと)の判定(ステップ406)は行われない。
【0118】
そして、ブレーキECU26は、ステップ406でブレーキペダル21の踏込が解除されたと判定した場合、その解除時点における負圧室R1の負圧およびマスタシリンダ23のマスタシリンダ圧を取得し、それぞれ負圧1、MC1として記憶する(ステップ408)。この記憶されている負圧室R1の負圧(負圧1)およびマスタシリンダ23のマスタシリンダ圧(MC1)を、踏込解除時のデータという。なお、ブレーキECU26は、ステップ406でブレーキペダル21の踏込が解除されていないと判定した場合、ステップ402〜406の処理を繰り返し実行する。
【0119】
なお、図19のフローチャートに沿った解除操作開始判定処理の代わりに、図20のフローチャートに沿った解除操作開始判定処理を実行するようにしてもよい。図20に示すフローチャートは、前々回に取得したマスタシリンダ圧と前回取得したマスタシリンダ圧も併せて比較する点で図19に示すフローチャートと異なっている。異なる点についてのみ詳述する。ステップ520において、前々回に取得したマスタシリンダ圧と前回取得したマスタシリンダ圧を比較している。すなわち、ブレーキECU26は、今回取得したマスタシリンダ圧が前回取得したマスタシリンダ圧より小さく、かつ、前回取得したマスタシリンダ圧が前々回取得したマスタシリンダ圧より小さい場合には、ステップ502,520でそれぞれ「YES」と判定し、解除操作が開始されたと判定する(ステップ504)。これ以外の場合には、解除操作が開始されていないと判定する(ステップ508)。このように、今回取得したマスタシリンダ圧だけでなく前回取得したマスタシリンダ圧も使用して(いわゆる2度読みフィルタ処理)解除操作開始を判定することができる。これにより、検出したマスタシリンダ圧からノイズなどに起因する誤ったデータを除去して解除操作開始の誤判定を抑制することができる。なお、ブレーキECU26は、ステップ522,524にて、前回取得したマスタシリンダ圧を前々回取得したマスタシリンダ圧に更新する。
【0120】
さらに、図20のフローチャートに沿った解除操作開始判定処理の代わりに、図21のフローチャートに沿った解除操作開始判定処理を実行するようにしてもよい。図21に示すフローチャートは、前回に取得したマスタシリンダ圧と今回取得したマスタシリンダ圧、および前々回に取得したマスタシリンダ圧と前回取得したマスタシリンダ圧をそれぞれ比較する際に、閾値KMも考慮して比較する点で図20に示すフローチャートと異なっている。異なる点についてのみ詳述する。図20のステップ502の処理に代えて、図21のステップ530の処理を実行する。すなわち、前回に取得したマスタシリンダ圧と、今回取得したマスタシリンダ圧に閾値KMを加えた値とを比較する。図20のステップ520の処理に代えて、図21のステップ532の処理を実行する。すなわち、前々回に取得したマスタシリンダ圧と、前回取得したマスタシリンダ圧に閾値KMを加えた値とを比較する。閾値KMは、マスタシリンダ圧センサ25a1の検出ふらつきを考慮して設定されている。例えば、閾値KMは検出ふらつきより大きい値に設定されている。これにより、上記2度読みフィルタ処理でも対処できないノイズによる解除操作開始の誤判定を抑制することができ、また、マスタシリンダ圧センサ25a1の検出ふらつきによる誤判定を抑制することもできる。
【0121】
次に、ブレーキECU26は、ブレーキペダル21の踏込解除時に取得した負圧とマスタシリンダ圧からなるデータを、ブレーキペダル21の踏込時にてバキュームブースタ22の実際の助勢限界を超えていたか否かに判別する(データ判別部26g)。すなわち、ブレーキECU26は、ブレーキペダル21の踏込解除時点以降における負圧室R1の負圧の変動に基づいて、ブレーキペダル21の踏込解除時に取得した負圧とマスタシリンダ圧からなるデータを、ブレーキペダル21の踏込時にてバキュームブースタ22の実際の助勢限界を超えていたか否かに判別する。
【0122】
具体的には、ブレーキECU26は、ブレーキペダル21の踏込解除時点(踏込解除開始時点)以降において、負圧室R1の負圧が一旦増大して元に戻れば、ステップ410にて「YES」と判定し、バキュームブースタ22の実際の助勢限界を超えてブレーキペダル21が踏込まれた後に該踏込みが解除されたと判定する。そして、ブレーキECU26は、ブレーキペダル21の踏込解除時の前記データが、ブレーキペダル21の踏込時にてバキュームブースタ22の実際の助勢限界を超えていたデータであると判別する(ステップ412)。これは、上記バキュームブースタ22の作動から理解できるように、バキュームブースタ22の実際の助勢限界を超えてブレーキペダル21が踏込まれ、その状態で踏み込みが保持された状態から、ブレーキペダル21が戻されると(踏込解除が開始されると)、負圧室R1の負圧が一旦増大し、その後、元の負圧に戻ることを利用するからである。
【0123】
なお、ステップ410において、ブレーキECU26は、図22に示す負圧増加判定ルーチンを実行する。この負圧増加判定ルーチンは所定の短時間(例えば10ミリ秒)毎に繰り返し実行される。ブレーキECU26は、今回取得した負圧が前回取得した負圧より大きい場合には、ステップ602で「YES」と判定し、負圧が増加(増大)したと判定する(ステップ604)。一方、ブレーキECU26は、今回取得した負圧が前回取得した負圧以下である場合には、ステップ602で「NO」と判定し、負圧が増加(増大)していないと判定する(ステップ608)。なお、ブレーキECU26は、ステップ606,610にて、今回取得した負圧を前回取得した負圧に更新する。
【0124】
一方、ブレーキECU26は、ブレーキペダル21の踏込解除時点以降において、前記負圧室の負圧が減少すれば、ステップ410,418にて「NO」,「YES」と判定し、バキュームブースタ22の実際の助勢限界を超えないでブレーキペダル21が踏込まれた後に該踏込みが解除されたと判定する。そして、ブレーキペダル21の踏込解除時の前記データが、ブレーキペダル21の踏込時にてバキュームブースタ22の実際の助勢限界を超えていなかったデータであると判別する(ステップ420)。これは、上記バキュームブースタ22の作動から理解できるように、バキュームブースタ22の実際の助勢限界を超えないでブレーキペダル21が踏込まれ、その状態で踏み込みが保持された状態から、ブレーキペダル21が戻されると(踏込解除が開始されると)、負圧室R1の負圧が一旦減少し、その後、元の負圧に戻ることを利用するからである。
【0125】
なお、ステップ418において、ブレーキECU26は、図23に示す負圧減少判定ルーチンを実行する。この負圧減少判定ルーチンは所定の短時間(例えば10ミリ秒)毎に繰り返し実行される。ブレーキECU26は、今回取得した負圧が前回取得した負圧より小さい場合には、ステップ612で「YES」と判定し、負圧が減少したと判定する(ステップ614)。一方、ブレーキECU26は、今回取得した負圧が前回取得した負圧以上である場合には、ステップ612で「NO」と判定し、負圧が減少していないと判定する(ステップ618)。なお、ブレーキECU26は、ステップ616,620にて、今回取得した負圧を前回取得した負圧に更新する。
【0126】
次に、ブレーキECU26は、第1記憶部26cで記憶されている負圧−助勢限界圧マップと、ブレーキペダル21の踏込時にてバキュームブースタ22の実際の助勢限界を超えていたか否かに判別された、ブレーキペダル21の踏込解除時に取得した負圧とマスタシリンダ圧からなるデータと、を前記取得した負圧において比較する(比較部26h)。
【0127】
具体的には、ブレーキECU26は、第1記憶部26cで記憶されている負圧−助勢限界圧マップと、ブレーキペダル21の踏込時にてバキュームブースタ22の実際の助勢限界を超えていたと判別された踏込解除時のデータ(負圧1,MC1)と、を比較する(ステップ414)。この際、その踏込解除時のデータが領域Iに属するか否か(すなわち、負圧−助勢限界圧マップより下に位置するか否か)を判定する。
【0128】
すなわち、ブレーキECU26は、図24に示す領域I判定・補正ルーチンを実行する。ブレーキECU26は、ステップ702において、第1記憶部26cで記憶されている負圧−助勢限界圧マップを示す式MCA=A×負圧−αに踏込解除時に取得した負圧1を代入し、負圧1における(踏込解除時の負圧における)マスタシリンダ圧を導出する。前記式が1次関数である場合において、Aは傾きであり、αは切片であるとする(図26および図27の初期マップ(補正前マップ))。そして、ブレーキECU26は、ステップ704において、ステップ702で負圧−助勢限界圧マップから導出した踏込解除時の負圧である負圧1におけるマスタシリンダ圧MCAと、踏込解除時に取得したマスタシリンダ圧MC1と、を比較する。ブレーキECU26は、MC1がMCAより小さい場合には、踏込解除時のデータが領域Iに属すると判定し、MC1がMCAより大きい場合には、踏込解除時のデータが領域I以外である(領域IIに属する)と判定する。
【0129】
ここで、第1記憶部26cに記憶されている負圧−助勢限界圧マップが実際のバキュームブースタ22の特性と一致している場合においては、バキュームブースタ22の実際の助勢限界を超えていた踏込解除時のデータのマスタシリンダ圧は、踏込解除時の負圧において負圧−助勢限界圧マップより上に位置するものであり下に位置することはない。逆に、バキュームブースタ22の実際の助勢限界を超えていない踏込解除時のデータのマスタシリンダ圧は、踏込解除時の負圧において負圧−助勢限界圧マップより下に位置するものであり上に位置することはない。
【0130】
しかし、第1記憶部26cに記憶されている負圧−助勢限界圧マップに対して実際のバキュームブースタ22の特性が下にずれた場合においては、バキュームブースタ22の実際の助勢限界を超えていた踏込解除時のデータのマスタシリンダ圧が、踏込解除時の負圧において記憶されている負圧−助勢限界圧マップより下に位置する場合が発生する。第1記憶部26cに記憶されている負圧−助勢限界圧マップに対して実際のバキュームブースタ22の特性が下にずれているからである。
【0131】
このことを利用して、図26に示すように、第1記憶部26cで記憶されている負圧−助勢限界圧マップ(初期マップ)に対して、ブレーキペダル21の踏込時にてバキュームブースタ22の実際の助勢限界を超えていたと判別された踏込解除時のデータ(負圧1,MC1)が領域Iに属していれば(すなわち、負圧−助勢限界圧マップより下に位置していれば)、第1記憶部26cに記憶されている負圧−助勢限界圧マップが実際のバキュームブースタ22の特性に対して上に位置したままであることがわかる。したがって、第1記憶部26cに記憶されている負圧−助勢限界圧マップを、実際のバキュームブースタ22の特性に対するずれ分だけ補正すればよい。
【0132】
そして、ブレーキECU26は、図18に示すステップ416において、第1記憶部26cに記憶されている負圧−助勢限界圧マップが、踏込解除時のデータ(負圧1,MC1)を通るように補正する。具体的には、ブレーキECU26は、図24に示すステップ706において、前述した比較結果に基づいて負圧−助勢限界圧マップの補正量を導出する。ブレーキECU26は、負圧−助勢限界圧マップから導出される、ブレーキペダル21の踏込解除時の負圧室R1の負圧に対応したマスタシリンダ圧(助勢限界圧)MCAと、踏込解除時のマスタシリンダ圧MC1との偏差(MCA−MC1)を補正量として導出する。
【0133】
さらに、ブレーキECU26は、ステップ706において、導出された補正量、および上記比較した踏込解除時のデータと負圧−助勢限界圧マップとの位置関係に基づいて、上記比較した負圧−助勢限界圧マップから新しい負圧−助勢限界圧マップを導出する。具体的には、補正前のαに偏差(MCA−MC1)を加えた値を新しいαとすることで、負圧−助勢限界圧マップを、導出された補正量だけ下方に移動させることで新しい負圧−助勢限界圧マップ(図26にて一点破線で示す補正後マップ)に補正する。
【0134】
また、ブレーキECU26は、第1記憶部26cで記憶されている負圧−助勢限界圧マップと、ブレーキペダル21の踏込時にてバキュームブースタ22の実際の助勢限界を超えていなかったと判別された踏込解除時のデータ(負圧1,MC1)と、を比較する(ステップ422)。この際、その踏込解除時のデータが領域IIに属するか否か(すなわち、負圧−助勢限界圧マップより上に位置するか否か)を判定する。
【0135】
すなわち、ブレーキECU26は、図25に示す領域II判定・補正ルーチンを実行する。ブレーキECU26は、ステップ712において、上記ステップ702と同様に、第1記憶部26cで記憶されている負圧−助勢限界圧マップを示す式MCA=A×負圧−αに踏込解除時に取得した負圧1を代入し、負圧1におけるマスタシリンダ圧を導出する。そして、ブレーキECU26は、ステップ714において、ステップ712で負圧−助勢限界圧マップから導出した踏込解除時の負圧である負圧1におけるマスタシリンダ圧MCAと、踏込解除時に取得したマスタシリンダ圧MC1と、を比較する。ブレーキECU26は、MC1がMCAより大きい場合には、踏込解除時のデータが領域IIに属すると判定し、MC1がMCAより小さい場合には、踏込解除時のデータが領域II以外である(領域Iに属する)と判定する。
【0136】
ここで、第1記憶部26cに記憶されている負圧−助勢限界圧マップに対して実際のバキュームブースタ22の特性が上にずれた場合においては、バキュームブースタ22の実際の助勢限界を超えていなかった踏込解除時のデータのマスタシリンダ圧が、踏込解除時の負圧において記憶されている負圧−助勢限界圧マップより上に位置する場合が発生する。第1記憶部26cに記憶されている負圧−助勢限界圧マップに対して実際のバキュームブースタ22の特性が上にずれているからである。
【0137】
このことを利用して、図27で示すように、第1記憶部26cで記憶されている負圧−助勢限界圧マップ(補正前マップ)に対して、ブレーキペダル21の踏込時にてバキュームブースタ22の実際の助勢限界を超えていなかったと判別された踏込解除時のデータ(負圧1,MC1)が領域IIに属していれば(すなわち、負圧−助勢限界圧マップより上に位置していれば)、第1記憶部26cに記憶されている負圧−助勢限界圧マップが実際のバキュームブースタ22の特性に対して下に位置したままであることがわかる。したがって、第1記憶部26cに記憶されている負圧−助勢限界圧マップを、実際のバキュームブースタ22の特性に対するずれ分だけ補正すればよい。
【0138】
そして、ブレーキECU26は、図18に示すステップ424において、第1記憶部26cに記憶されている負圧−助勢限界圧マップが、踏込解除時のデータ(負圧1,MC1)を通るように補正する。具体的には、ブレーキECU26は、図25に示すステップ716において、前述した比較結果に基づいて負圧−助勢限界圧マップの補正量を導出する。ブレーキECU26は、負圧−助勢限界圧マップから導出される、ブレーキペダル21の踏込解除時の負圧室R1の負圧に対応したマスタシリンダ圧(助勢限界圧)MCAと、踏込解除時のマスタシリンダ圧MC1との偏差(MC1−MCA)を補正量として導出する。
【0139】
さらに、ブレーキECU26は、ステップ716において、導出された補正量、および上記比較した踏込解除時のデータと負圧−助勢限界圧マップとの位置関係に基づいて、上記比較した負圧−助勢限界圧マップから新しい負圧−助勢限界圧マップを導出する。具体的には、補正前のαに偏差(MC1−MCA)を加えた値を新しいαとすることで、負圧−助勢限界圧マップを、導出された補正量だけ上方に移動させることで新しい負圧−助勢限界圧マップ(図27の補正後マップ)に補正する。
【0140】
なお、判別手段は、ブレーキ操作部材(ブレーキペダル)21の踏込解除時点以降における負圧室R1の負圧の変化から、ブレーキ操作部材21の踏込時にてバキュームブースタ22の実際の助勢限界を超えていたか否かを判別する。本実施の形態では、判別手段は、上述したデータ判別部26gである。すなわち、データ判別部26gは、ブレーキペダル21の踏込解除時点以降において、負圧室R1の負圧が一旦増大して元に戻れば、バキュームブースタ22の実際の助勢限界を超えてブレーキペダル21が踏込まれた後に該踏込みが解除されたと判定することで、ブレーキペダル21の踏込解除時の前記データが、ブレーキペダル21の踏込時にてバキュームブースタ22の実際の助勢限界を超えていたデータであると判別する(ブレーキ操作部材21の踏込時にてバキュームブースタ22の実際の助勢限界を超えていたと判別する)。一方、データ判別部26gは、ブレーキペダル21の踏込解除時点以降において、前記負圧室の負圧が減少すれば、バキュームブースタ22の実際の助勢限界を超えないでブレーキペダル21が踏込まれた後に該踏込みが解除されたと判定することで、ブレーキペダル21の踏込解除時の前記データが、ブレーキペダル21の踏込時にてバキュームブースタ22の実際の助勢限界を超えていなかったデータであると判別する(ブレーキ操作部材21の踏込時にてバキュームブースタ22の実際の助勢限界を超えていなかったと判別する)。
【0141】
また、補正手段は、バキュームブースタ22の助勢限界に対応したマスタシリンダ23の圧力限界である助勢限界圧に応じた基準値を判別手段の判別結果に基づいて補正する。本実施の形態では、補正手段は、上述した比較部26h、補正量導出部26i、マップ導出部26jを有している。本実施の形態では負圧−助勢限界圧マップを前記基準値としている。また、駆動手段は、マスタシリンダ圧取得手段で取得されたマスタシリンダ圧が基準値以上である場合、油圧ポンプ44a,54aを駆動させる。本実施の形態では、駆動手段は、上述した助勢制御部26eである。
【0142】
上述した説明から明らかなように、本実施の形態によれば、記憶手段(26c)には、負圧室R1の任意の負圧と、その負圧における該バキュームブースタ22の助勢限界に対応したマスタシリンダ23の圧力である助勢限界圧との関係を示す負圧−助勢限界圧マップ(図11)が記憶されている。補正手段(26,26f−26j、図18のフローチャート)が、負圧−助勢限界圧マップと、ブレーキ操作部材21の踏込時にてバキュームブースタ22の実際の助勢限界を超えていたか否かに判別された、ブレーキ操作部材21の踏込解除時に取得した負圧とマスタシリンダ圧からなるデータと、を取得した負圧において比較し、該比較結果に基づいて負圧−助勢限界圧マップを補正する。更新手段(26,26k)が、補正手段により補正された新しい負圧−助勢限界圧マップを記憶手段に記憶させる。判定用助勢限界圧演算手段(26d、ステップ106)が、負圧取得手段(26a、ステップ104)で取得された負圧と負圧−助勢限界圧マップとから求められる助勢限界圧を判定用助勢限界圧として演算する。助勢制御手段(26e、ステップ108−112)が、マスタシリンダ圧取得手段(26b、ステップ102)で取得されたマスタシリンダ圧が判定用助勢限界圧演算手段で演算された判定用助勢限界圧以上である場合、油圧ポンプ44a,54aを駆動させその駆動により形成されるブレーキ液圧をブレーキ操作部材21の操作に応じて形成されたマスタシリンダ圧に加圧することで、ブレーキ操作部材の操作に応じた目標ブレーキ液圧をホイールシリンダWC**に供給する助勢制御を行う。
【0143】
なお、補正手段は、助勢限界圧の基準値(負圧−助勢限界マスタシリンダ圧特性に相当する基準値)として、負圧室R1の任意の負圧と、その負圧におけるバキュームブースタ22の助勢限界に対応したマスタシリンダ23の圧力である助勢限界圧との関係を示す負圧−助勢限界圧マップ(図11)が記憶されている記憶手段(26c)を備え、補正手段が、負圧−助勢限界圧マップと、ブレーキ操作部材21の踏込解除時に取得した負圧とマスタシリンダ圧からなるデータと、ブレーキ操作部材21の踏込時におけるバキュームブースタ22の実際の助勢限界を超えていたか否かの判別結果とに基づいて負圧−助勢限界圧マップを補正する。そして、補正手段により補正された新しい負圧−助勢限界圧マップを記憶手段に記憶させる。
【0144】
これによれば、負圧−助勢限界圧マップは、ブレーキ操作部材21の踏込時にてバキュームブースタ22の実際の助勢限界を超えていたか否かに判別された、ブレーキ操作部材21の踏込解除時に取得した負圧とマスタシリンダ圧からなるデータを使用して補正される。したがって、負圧−助勢限界圧マップを1種類だけを使用して、そのマップを多数のブレーキ装置に適用する場合、当初、そのマップがそのバキュームブースタ22の実際の負圧−助勢限界圧特性と異なっていても、本発明に係る補正により当初マップが実際の負圧−助勢限界圧特性となるように補正することができる。また、当初、負圧−助勢限界圧マップがバキュームブースタ22の実際の負圧−助勢限界圧関係と一致していたが、経時変化により実際の負圧−助勢限界圧特性が変化した場合でも、本発明に係る補正により当初マップが実際の負圧−助勢限界圧特性となるように補正することができる。このように、バキュームブースタ22の負圧−助勢限界圧特性にバラツキがあってもあるいは事後的に発生しても、その特性に相当する負圧−助勢限界圧マップを適正に補正することで、負圧−助勢限界圧マップが実際の負圧−助勢限界圧関係と乖離するのを抑制することができる。したがって、助勢制御の開始(油圧ポンプ44a,54aの駆動開始)を判定する判定用助勢限界圧を、適正に補正された負圧−助勢限界圧マップに基づいて適切に導出することができ、ひいては、適切なタイミングで助勢制御を開始させることができる。つまり、バキュームブースタ22の特性バラツキの影響をできるだけ抑制して、ブレーキ装置Aに所望のブレーキ性能を十分に発揮させることができる。また、判定用助勢限界圧を、導出時に演算することなしに適正に補正された負圧−助勢限界圧マップに基づいて適切に導出することができる。
【0145】
また、負圧−助勢限界圧特性の基準値(負圧−助勢限界圧マップ)は、ブレーキ操作部材21の踏込み解除時の負圧変化からブレーキ操作部材21の踏込時にてバキュームブースタ22の実際の助勢限界を超えていたか否かを判別し、ブレーキ操作部材21の踏込解除時に取得した負圧とマスタシリンダ圧からなるデータを使用して補正される。したがって、制御の開始(油圧ポンプ44a,54aの駆動開始)を判定する判定用助勢限界圧を、実際の負圧助勢限界の結果によって適正に補正された負圧−助勢限界圧の基準値に基づいて適切に導出することができ、ひいては、適切なタイミングで助勢制御を開始させることができる。つまり、バキュームブースタ22の特性バラツキの影響をできるだけ抑制して、ブレーキ装置Aに所望のブレーキ性能を十分に発揮させることができる。
【0146】
また、補正手段は、ブレーキ操作部材21の踏込解除時のデータが、ブレーキ操作部材21の踏込時にてバキュームブースタ22の実際の助勢限界を超えていたと判別されたものであって、負圧−助勢限界圧マップより下方に位置する場合、負圧−助勢限界圧マップから導出される、ブレーキ操作部材の踏込解除時の負圧室R1の負圧に対応した助勢限界圧と、踏込解除時のマスタシリンダ圧との偏差を補正量として導出し、負圧−助勢限界圧マップを補正量だけ下方に移動させることで補正する(ステップ414,416)。これにより、実際の負圧−助勢限界圧特性が、記憶手段に記憶されている負圧−助勢限界圧マップより下方にずれているか或いは事後的にずれた場合であっても、負圧−助勢限界圧マップを適切に補正することができる。
【0147】
また、補正手段は、ブレーキ操作部材21の踏込解除時点以降において、負圧室R1の負圧が一旦増大して元に戻れば、バキュームブースタ22の実際の助勢限界を超えてブレーキ操作部材21が踏込まれた後に該踏込みが解除されたと判定することで、ブレーキ操作部材21の踏込解除時のデータが、ブレーキ操作部材21の踏込時にてバキュームブースタ22の実際の助勢限界を超えていたものであると判別される(ステップ410,412)。これにより、従来から検出していた負圧に基づいて、ブレーキ操作部材21の踏込解除時のデータが、ブレーキ操作部材21の踏込時にてバキュームブースタ22の実際の助勢限界を超えていたものであると判別することができる。したがって、別の検出手段を設けなくてすむので、コスト上昇、構造複雑化、大型化を招くことなく、かつ確実に前記判別を行うことができる。
【0148】
また、補正手段は、ブレーキ操作部材21の踏込解除時のデータが、ブレーキ操作部材21の踏込時にてバキュームブースタ22の実際の助勢限界を超えていなかったと判別されたものであって、負圧−助勢限界圧マップより上方に位置する場合、負圧−助勢限界圧マップから導出される、ブレーキ操作部材21の踏込解除時の負圧室R1の負圧に対応した助勢限界圧と、踏込解除時のマスタシリンダ圧との偏差を補正量として導出し、負圧−助勢限界圧マップを補正量だけ上方に移動させることで補正する(ステップ422)。これにより、実際の負圧−助勢限界圧特性が、記憶手段に記憶されている負圧−助勢限界圧マップより上方にずれているか或いは事後的にずれた場合であっても、負圧−助勢限界圧マップを適切に補正することができる。
【0149】
また、補正手段は、ブレーキ操作部材21の踏込解除時点以降において、負圧室R1の負圧が減少すれば、バキュームブースタ22の実際の助勢限界を超えないでブレーキ操作部材21が踏込まれた後に該踏込みが解除されたと判定することで、ブレーキ操作部材21の踏込解除時のデータが、ブレーキ操作部材21の踏込時にてバキュームブースタ22の実際の助勢限界を超えていなかったものであると判別される(ステップ418,420)。これにより、従来から検出していた負圧に基づいて、ブレーキ操作部材21の踏込解除時のデータが、ブレーキ操作部材21の踏込時にてバキュームブースタ22の実際の助勢限界を超えていなかったものであると判別することができる。したがって、別の検出手段を設けなくてすむので、コスト上昇、構造複雑化、大型化を招くことなく、かつ確実に前記判別を行うことができる。
【0150】
また、補正手段は、マスタシリンダ圧が減少すれば、ブレーキ操作部材21の踏込が解除されたと判定する(ステップ406、図19のフローチャート)。これにより、ブレーキ操作部材21の踏込解除判定を正確かつ的確に行うことができる。
【0151】
また、補正手段は、ブレーキ操作部材21のストローク量が減少すれば、ブレーキ操作部材21の踏込が解除されたと判定する。これにより、ブレーキ操作部材21の踏込解除判定を正確かつ的確に行うことができる。
【0152】
なお、上述した実施の形態において、補正手段は、導出した補正量を複数記憶し、それら複数の補正量に基づいて補正量を導出し、その導出した補正量に基づいて負圧−助勢限界圧マップを補正するようにしてもよい。具体的には、図18のフローチャートに代えて図28のフローチャートを実施するようにすればよい。すなわち、ブレーキECU26は、図18のステップ416,418の処理に代えて、ステップ730,732において補正量を算出して記憶する。このとき、ブレーキECU26は、ステップ416,416の処理中の補正量の算出処理を行って、その補正量を記憶する。その後、ブレーキECU26は、補正量を所定の個数だけ記憶すると、ステップ734で「YES」と判定し、ステップ736で記憶されている所定個数の補正量に基づく平均補正量を補正量として算出する。そして、ブレーキECU26は、上記ステップ416(または424)と同様に、ステップ738にてその補正量(平均補正量)を使用して負圧−助勢限界圧マップを補正する。これにより、精度のよい信頼性のある補正量を導出することができ、ひいては負圧−助勢限界圧マップを精度よく信頼性高い補正することができる。
【0153】
また、上述した実施の形態において、ブレーキ操作部材21の解除時に取得した負圧およびマスタシリンダ圧からなるデータが負圧−助勢限界圧マップを基準とした所定範囲外に位置すれば、補正手段は補正量の導出を禁止し補正を行わないようにしてもよい。具体的には、図24のフローチャートに代えて図29のフローチャートを実施するようにすればよい。すなわち、ブレーキEUC26は、ステップ702〜706の処理に加えて、ステップ742〜748の処理を行う。ステップ742において、ブレーキECU26は、第1記憶部26cで記憶されている負圧−助勢限界圧マップの上限範囲を示す式MCE1=A×負圧−(α−β)(図30参照)に踏込解除時に取得した負圧1を代入し、負圧1における(踏込解除時の負圧における)マスタシリンダ圧を導出する。ステップ744において、ブレーキECU26は、第1記憶部26cで記憶されている負圧−助勢限界圧マップの下限範囲を示す式MCE2=A×負圧−(α+β)(図30参照)に踏込解除時に取得した負圧1を代入し、負圧1における(踏込解除時の負圧における)マスタシリンダ圧を導出する。βは上記所定範囲を規定する値である。
【0154】
ステップ746において、ブレーキECU26は、ステップ742で導出した踏込解除時の負圧である負圧1におけるマスタシリンダ圧MCE1と、踏込解除時に取得したマスタシリンダ圧MC1と、を比較する。ステップ748において、ブレーキECU26は、ステップ744で導出した踏込解除時の負圧である負圧1におけるマスタシリンダ圧MCE2と、踏込解除時に取得したマスタシリンダ圧MC1と、を比較する。踏込解除時に取得したマスタシリンダ圧MC1が、マスタシリンダ圧MCE1とマスタシリンダ圧MCE2の間にあれば、さらにマスタシリンダ圧MC1が領域Iにあれば補正量を算出し(ステップ706)、マスタシリンダ圧MCE1とマスタシリンダ圧MCE2の間になければ、補正量の算出を行わず補正を行わない。なお、図25のフローチャートも同様に図24のフローチャートと同様に変更するようにしてもよい。
【0155】
これにより、信頼性の高い前記データのみを適切に選択して使用することで、精度のよいマップに補正することができ、ひいては、より正確な制御をおこなうことができる。
【0156】
また、上述した実施の形態においては、負圧源の負圧供給状態の正常・異常を検出する負圧供給状態検出手段をさらに備え、負圧供給状態検出手段が負圧供給状態が異常である旨を検出すれば、補正手段は補正量の導出を禁止し補正を行わないようにしてもよい。具体的には、ブレーキECU26は、図31に示すフローチャートを実行する。すなわち、ブレーキECU26は、ステップ750において、負圧源の負圧供給状態が正常であるか否かを判定する。例えば、負圧源がエンジン11である場合、エンジンECU17からの情報から正常であるか否かを判定する。負圧源の負圧供給状態が正常である場合には、ブレーキECU26は、ステップ750で「YES」と判定し、負圧−助勢限界圧マップの補正を許可する(ステップ752)。一方、負圧源の負圧供給状態が異常である場合には、ブレーキECU26は、ステップ750で「NO」と判定し、負圧−助勢限界圧マップの補正を禁止する(ステップ754)。これにより、信頼性の低い前記データを予め排除することで、信頼性の低いデータを処理する無駄な制御を行うことなく、精度のよいマップに補正することができ、ひいては、より正確な制御をおこなうことができる。
【0157】
なお、本実施の形態では、負圧−助勢限界圧特性をマップとし、マップの値を補正しているが、例えば、負圧−助勢限界圧特性を、負圧を変数とする演算式で求めるものとし、その係数や偏差を補正し、結果的に演算結果となる基準値を補正するものであってもよい。この場合、本実施の形態と同様に、踏込み解除時の負圧と前記演算式で求めた助勢限界圧と、踏込み解除時のマスタシリンダ圧との偏差を前記演算式の偏差に加算(減算)して補正するようにしてもよいし、補正の度に予め決められた定数を偏差に加算(減算)するようにして補正してもよい。
【符号の説明】
【0158】
11…エンジン、12…変速機、13…ディファレンシャル、15a…スロットルバルブ、15b…モータ、15c…スロットル開度センサ、16…アクセルペダル、16a…アクセル開度センサ、17…エンジンECU、21…ブレーキペダル、22…バキュームブースタ、22f2…負圧センサ(負圧検出手段)、23…マスタシリンダ、23a,23b…第1および第2液圧室、23c,23d…第1および第2出力ポート、24…リザーバタンク、25…ブレーキアクチュエータ、25a1…マスタシリンダ圧センサ(マスタシリンダ圧検出手段)、26…ブレーキECU(制御装置)、26a…負圧取得部(負圧取得手段)、26b…マスタシリンダ圧取得部(マスタシリンダ圧取得手段)、26c…記憶部(記憶手段)、26d…判定用助勢限界圧演算部(判定用助勢限界圧演算手段)、26e…助勢制御部(助勢制御手段)、26f…踏込解除時の負圧、マスタシリンダ圧導出部、26g…データ判別部、26h…比較部、26i…補正量導出部、26j…マップ導出部、26k…マップ更新部(更新手段)、41,51…差圧制御弁、42a,43a,52a,53a…増圧弁、42b,43b,52b,53b…減圧弁、44c,54c…調圧リザーバ、44a,54a…ポンプ(油圧ポンプ)、A…液圧ブレーキ装置、Wfl,Wfr,Wrl,Wrr…車輪、Sfl,Sfr,Srl,Srr…車輪速センサ、WCfl,WCfr,WCrl,WCrr…ホイールシリンダ。
【特許請求の範囲】
【請求項1】
ブレーキ操作部材(21)の操作に応じたブレーキ液圧を形成するマスタシリンダ(23)と、
負圧が供給されその負圧を利用することで前記ブレーキ操作部材の操作力を助勢して前記マスタシリンダに出力するバキュームブースタ(22)と、
前記マスタシリンダから供給されるブレーキ液圧の供給を受けて車両(M)の各車輪(W**)に制動力を付与するホイールシリンダ(WC**)と、
前記マスタシリンダと前記ホイールシリンダを繋ぐ油圧経路(25a,25b)に接続され、電動モータ(44b)の出力により駆動されてブレーキ液圧を形成して前記マスタシリンダと独立して前記ホイールシリンダに供給する油圧ポンプ(44a,54a)と、
前記バキュームブースタの負圧室の負圧を取得する負圧取得手段(26a、ステップ104)と、
前記マスタシリンダの圧力を取得するマスタシリンダ圧取得手段(26b、ステップ102)と、
前記ブレーキ操作部材の踏込解除時点以降における前記負圧室の負圧の変化から、前記ブレーキ操作部材の踏込時にて前記バキュームブースタの実際の助勢限界を超えていたか否かを判別する判別手段(26,26g)と、
前記バキュームブースタの助勢限界に対応した前記マスタシリンダの圧力限界である助勢限界圧に応じた基準値を前記判別手段の判別結果に基づいて補正する補正手段(26,26h−26j)と、
前記マスタシリンダ圧取得手段で取得されたマスタシリンダ圧が前記基準値以上である場合、前記油圧ポンプを駆動させる駆動手段(26e、ステップ108−112)と、
を備えたことを特徴とするブレーキ装置。
【請求項2】
請求項1において、
前記補正手段は、前記助勢限界圧の基準値として、前記負圧室の任意の負圧と、その負圧における該バキュームブースタの助勢限界に対応した前記マスタシリンダの圧力である助勢限界圧との関係を示す負圧−助勢限界圧マップ(図11)が記憶されている記憶手段(26c)を備え、
前記負圧−助勢限界圧マップと、前記ブレーキ操作部材の踏込解除時に取得した負圧とマスタシリンダ圧からなるデータと、前記ブレーキ操作部材の踏込時における前記バキュームブースタの実際の助勢限界を超えていたか否かの判別結果に基づいて前記負圧−助勢限界圧マップを補正し(26、26f−26j、図18のフローチャート)、前記補正手段により補正された新しい負圧−助勢限界圧マップを前記記憶手段に記憶させる更新手段(26k)によって更新することを特徴とするブレーキ装置。
【請求項3】
請求項2において、前記補正手段は、前記ブレーキ操作部材の踏込解除時の前記データが、前記ブレーキ操作部材の踏込時にて前記バキュームブースタの実際の助勢限界を超えていたと判別されたものであって、前記負圧−助勢限界圧マップより下方に位置する場合、前記負圧−助勢限界圧マップから導出される、前記ブレーキ操作部材の踏込解除時の前記負圧室の負圧に対応した助勢限界圧と、前記踏込解除時の前記マスタシリンダ圧との偏差を補正量として導出し、前記負圧−助勢限界圧マップを前記補正量だけ下方に移動させることで補正する(ステップ414,416)ことを特徴とするブレーキ装置。
【請求項4】
請求項1乃至請求項3の何れか一項において、前記補正手段は、前記ブレーキ操作部材の踏込解除時点以降において、前記負圧室の負圧が一旦増大して元に戻れば、前記バキュームブースタの実際の助勢限界を超えて前記ブレーキ操作部材が踏込まれた後に該踏込みが解除されたと判定することで、前記ブレーキ操作部材の踏込解除時の前記データが、前記ブレーキ操作部材の踏込時にて前記バキュームブースタの実際の助勢限界を超えていたものであると判別される(ステップ410,412)ことを特徴とするブレーキ装置。
【請求項5】
請求項2乃至請求項4の何れか一項において、前記補正手段は、前記ブレーキ操作部材の踏込解除時の前記データが、前記ブレーキ操作部材の踏込時にて前記バキュームブースタの実際の助勢限界を超えていなかったと判別されたものであって、前記負圧−助勢限界圧マップより上方に位置する場合、前記負圧−助勢限界圧マップから導出される、前記ブレーキ操作部材の踏込解除時の前記負圧室の負圧に対応した助勢限界圧と、前記踏込解除時の前記マスタシリンダ圧との偏差を補正量として導出し、前記負圧−助勢限界圧マップを前記補正量だけ上方に移動させることで補正する(ステップ422,424)ことを特徴とするブレーキ装置。
【請求項6】
請求項1乃至請求項5の何れか一項において、前記補正手段は、前記ブレーキ操作部材の踏込解除時点以降において、前記負圧室の負圧が減少すれば、前記ブレーキ操作部材の踏込解除時の前記データが、前記ブレーキ操作部材の踏込時にて前記バキュームブースタの実際の助勢限界を超えていなかったものであると判別される(ステップ418,420)ことを特徴とするブレーキ装置。
【請求項7】
請求項3乃至請求項6の何れか一項において、前記補正手段は、前記導出した補正量を複数記憶し、それら複数の補正量に基づいて補正量を導出し、その導出した補正量に基づいて前記負圧−助勢限界圧マップを補正する(図28のフローチャート)ことを特徴とするブレーキ装置。
【請求項8】
請求項2乃至請求項7の何れか一項において、前記ブレーキ操作部材の解除時に取得した負圧およびマスタシリンダ圧からなるデータが前記負圧−助勢限界圧マップを基準とした所定範囲外に位置すれば、前記補正手段は前記補正量の導出を禁止し補正を行わない(図29のフローチャート)ことを特徴とするブレーキ装置。
【請求項9】
請求項1乃至請求項8の何れか一項において、前記負圧源の負圧供給状態の正常・異常を検出する負圧供給状態検出手段をさらに備え、前記負圧供給状態検出手段が負圧供給状態が異常である旨を検出すれば、前記補正手段は前記補正量の導出を禁止し補正を行わない(図31のフローチャート)ことを特徴とするブレーキ装置。
【請求項1】
ブレーキ操作部材(21)の操作に応じたブレーキ液圧を形成するマスタシリンダ(23)と、
負圧が供給されその負圧を利用することで前記ブレーキ操作部材の操作力を助勢して前記マスタシリンダに出力するバキュームブースタ(22)と、
前記マスタシリンダから供給されるブレーキ液圧の供給を受けて車両(M)の各車輪(W**)に制動力を付与するホイールシリンダ(WC**)と、
前記マスタシリンダと前記ホイールシリンダを繋ぐ油圧経路(25a,25b)に接続され、電動モータ(44b)の出力により駆動されてブレーキ液圧を形成して前記マスタシリンダと独立して前記ホイールシリンダに供給する油圧ポンプ(44a,54a)と、
前記バキュームブースタの負圧室の負圧を取得する負圧取得手段(26a、ステップ104)と、
前記マスタシリンダの圧力を取得するマスタシリンダ圧取得手段(26b、ステップ102)と、
前記ブレーキ操作部材の踏込解除時点以降における前記負圧室の負圧の変化から、前記ブレーキ操作部材の踏込時にて前記バキュームブースタの実際の助勢限界を超えていたか否かを判別する判別手段(26,26g)と、
前記バキュームブースタの助勢限界に対応した前記マスタシリンダの圧力限界である助勢限界圧に応じた基準値を前記判別手段の判別結果に基づいて補正する補正手段(26,26h−26j)と、
前記マスタシリンダ圧取得手段で取得されたマスタシリンダ圧が前記基準値以上である場合、前記油圧ポンプを駆動させる駆動手段(26e、ステップ108−112)と、
を備えたことを特徴とするブレーキ装置。
【請求項2】
請求項1において、
前記補正手段は、前記助勢限界圧の基準値として、前記負圧室の任意の負圧と、その負圧における該バキュームブースタの助勢限界に対応した前記マスタシリンダの圧力である助勢限界圧との関係を示す負圧−助勢限界圧マップ(図11)が記憶されている記憶手段(26c)を備え、
前記負圧−助勢限界圧マップと、前記ブレーキ操作部材の踏込解除時に取得した負圧とマスタシリンダ圧からなるデータと、前記ブレーキ操作部材の踏込時における前記バキュームブースタの実際の助勢限界を超えていたか否かの判別結果に基づいて前記負圧−助勢限界圧マップを補正し(26、26f−26j、図18のフローチャート)、前記補正手段により補正された新しい負圧−助勢限界圧マップを前記記憶手段に記憶させる更新手段(26k)によって更新することを特徴とするブレーキ装置。
【請求項3】
請求項2において、前記補正手段は、前記ブレーキ操作部材の踏込解除時の前記データが、前記ブレーキ操作部材の踏込時にて前記バキュームブースタの実際の助勢限界を超えていたと判別されたものであって、前記負圧−助勢限界圧マップより下方に位置する場合、前記負圧−助勢限界圧マップから導出される、前記ブレーキ操作部材の踏込解除時の前記負圧室の負圧に対応した助勢限界圧と、前記踏込解除時の前記マスタシリンダ圧との偏差を補正量として導出し、前記負圧−助勢限界圧マップを前記補正量だけ下方に移動させることで補正する(ステップ414,416)ことを特徴とするブレーキ装置。
【請求項4】
請求項1乃至請求項3の何れか一項において、前記補正手段は、前記ブレーキ操作部材の踏込解除時点以降において、前記負圧室の負圧が一旦増大して元に戻れば、前記バキュームブースタの実際の助勢限界を超えて前記ブレーキ操作部材が踏込まれた後に該踏込みが解除されたと判定することで、前記ブレーキ操作部材の踏込解除時の前記データが、前記ブレーキ操作部材の踏込時にて前記バキュームブースタの実際の助勢限界を超えていたものであると判別される(ステップ410,412)ことを特徴とするブレーキ装置。
【請求項5】
請求項2乃至請求項4の何れか一項において、前記補正手段は、前記ブレーキ操作部材の踏込解除時の前記データが、前記ブレーキ操作部材の踏込時にて前記バキュームブースタの実際の助勢限界を超えていなかったと判別されたものであって、前記負圧−助勢限界圧マップより上方に位置する場合、前記負圧−助勢限界圧マップから導出される、前記ブレーキ操作部材の踏込解除時の前記負圧室の負圧に対応した助勢限界圧と、前記踏込解除時の前記マスタシリンダ圧との偏差を補正量として導出し、前記負圧−助勢限界圧マップを前記補正量だけ上方に移動させることで補正する(ステップ422,424)ことを特徴とするブレーキ装置。
【請求項6】
請求項1乃至請求項5の何れか一項において、前記補正手段は、前記ブレーキ操作部材の踏込解除時点以降において、前記負圧室の負圧が減少すれば、前記ブレーキ操作部材の踏込解除時の前記データが、前記ブレーキ操作部材の踏込時にて前記バキュームブースタの実際の助勢限界を超えていなかったものであると判別される(ステップ418,420)ことを特徴とするブレーキ装置。
【請求項7】
請求項3乃至請求項6の何れか一項において、前記補正手段は、前記導出した補正量を複数記憶し、それら複数の補正量に基づいて補正量を導出し、その導出した補正量に基づいて前記負圧−助勢限界圧マップを補正する(図28のフローチャート)ことを特徴とするブレーキ装置。
【請求項8】
請求項2乃至請求項7の何れか一項において、前記ブレーキ操作部材の解除時に取得した負圧およびマスタシリンダ圧からなるデータが前記負圧−助勢限界圧マップを基準とした所定範囲外に位置すれば、前記補正手段は前記補正量の導出を禁止し補正を行わない(図29のフローチャート)ことを特徴とするブレーキ装置。
【請求項9】
請求項1乃至請求項8の何れか一項において、前記負圧源の負圧供給状態の正常・異常を検出する負圧供給状態検出手段をさらに備え、前記負圧供給状態検出手段が負圧供給状態が異常である旨を検出すれば、前記補正手段は前記補正量の導出を禁止し補正を行わない(図31のフローチャート)ことを特徴とするブレーキ装置。
【図1】


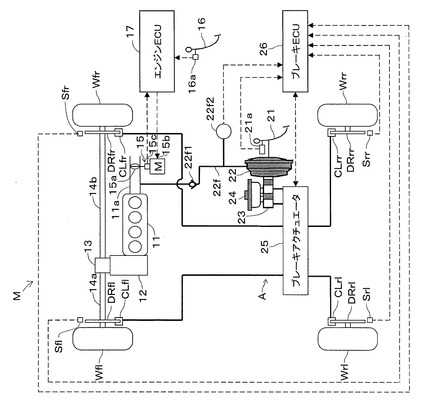
【図2】
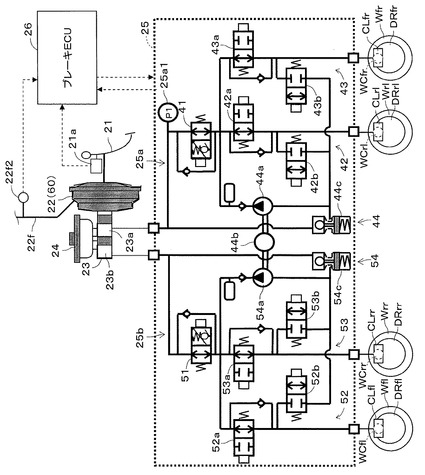
【図3】
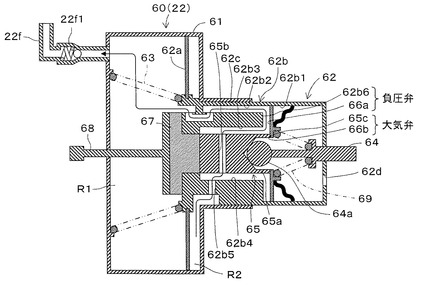
【図4】
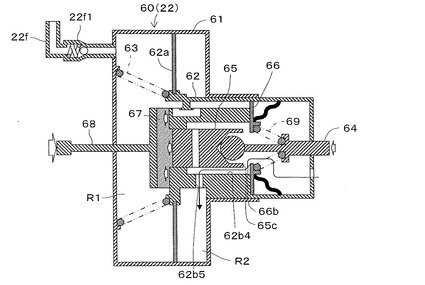
【図5】

【図6】
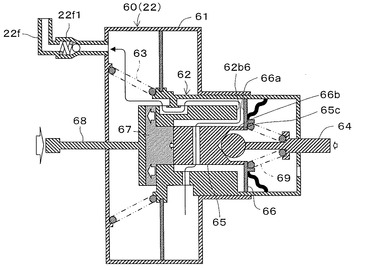
【図7】
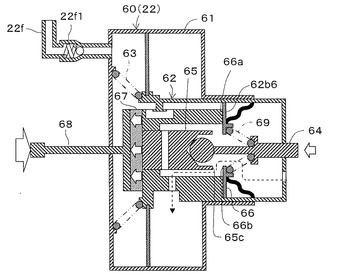
【図8】
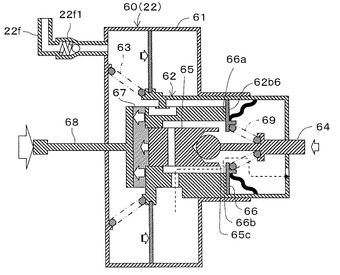
【図9】

【図10】
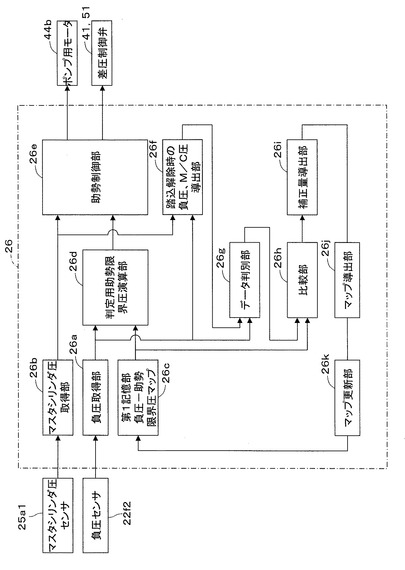
【図11】

【図12】
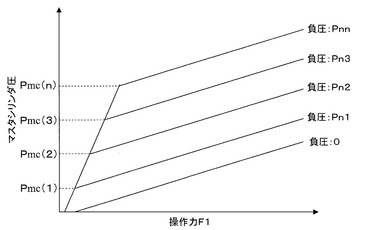
【図13】
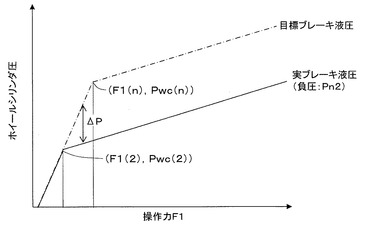
【図14】

【図15】

【図16】
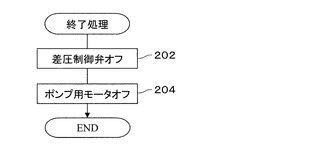
【図17】
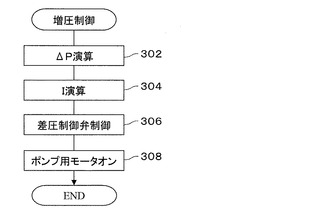
【図18】
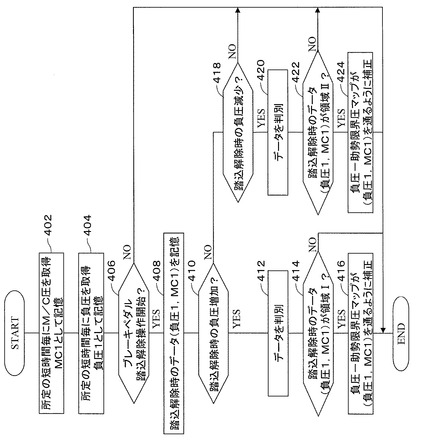
【図19】
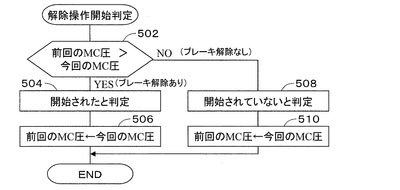
【図20】
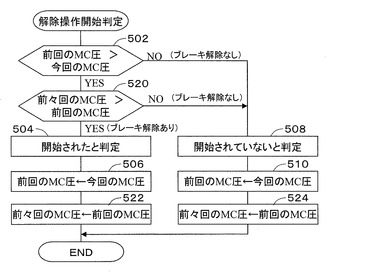
【図21】
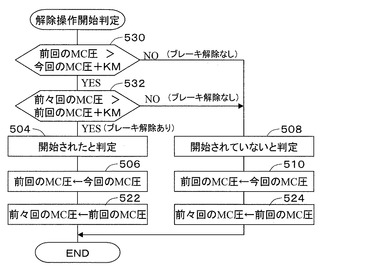
【図22】
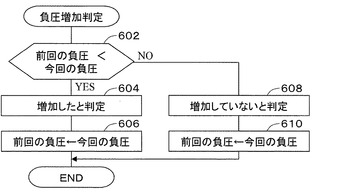
【図23】
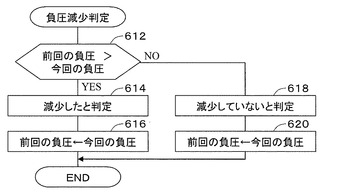
【図24】
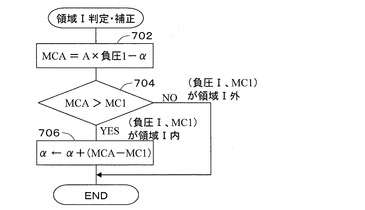
【図25】
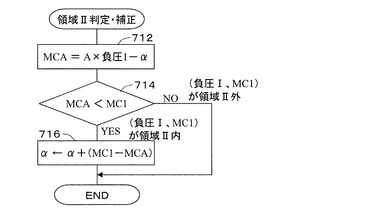
【図26】
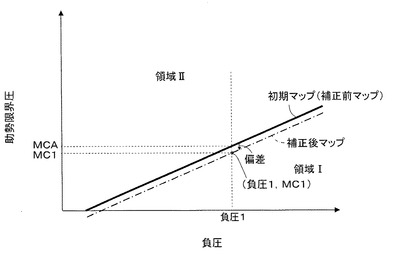
【図27】

【図28】
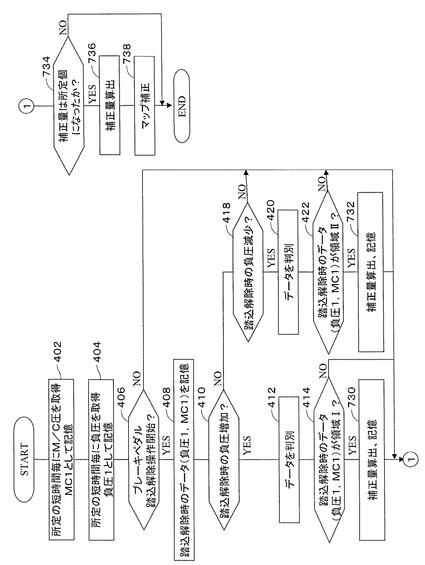
【図29】
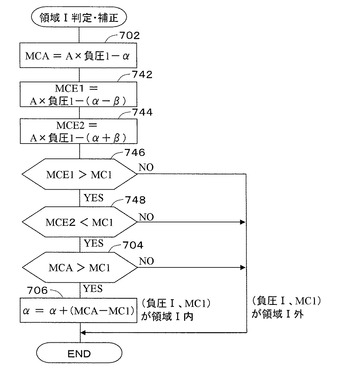
【図30】

【図31】
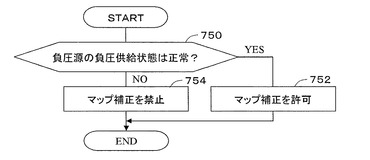
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図23】
【図24】
【図25】
【図26】
【図27】
【図28】
【図29】
【図30】
【図31】
【公開番号】特開2010−234985(P2010−234985A)
【公開日】平成22年10月21日(2010.10.21)
【国際特許分類】
【出願番号】特願2009−85962(P2009−85962)
【出願日】平成21年3月31日(2009.3.31)
【出願人】(301065892)株式会社アドヴィックス (1,291)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
【公開日】平成22年10月21日(2010.10.21)
【国際特許分類】
【出願日】平成21年3月31日(2009.3.31)
【出願人】(301065892)株式会社アドヴィックス (1,291)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
[ Back to top ]