
Fターム[3D246JB01]の内容
ブレーキシステム(制動力調整) (55,256) | 制御方法 (3,867) | 基準値設定 (1,293)
Fターム[3D246JB01]の下位に属するFターム
Fターム[3D246JB01]に分類される特許
1 - 20 / 189
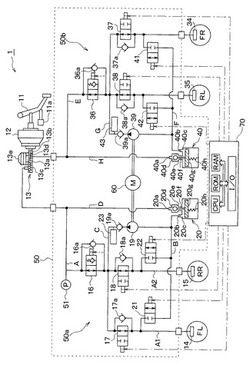
車両用制動制御装置
【課題】ブレーキフィーリングの悪化を抑制する。
【解決手段】ブレーキペダル11の踏み込みが無効ストローク分に達したときに第1、第2差圧制御弁16、36の差圧量を保持せずに、その後もブレーキペダル11の踏み込みに応じて第1、第2差圧制御弁16、36の差圧量を大きくし、ポンプ加圧によってW/C圧の嵩上げを行う。このようにすれば、ポンプ加圧による嵩上げ分だけM/C圧を低下させることが可能となり、ブレーキペダル11がM/C13側に吸い込まれる量を小さくでき、M/C圧が低下してペダル反力が低下する量も小さくすることが可能になる。
(もっと読む)
車両の運動制御装置

【課題】簡単な構成でハンドル角が小さな低横加速度旋回領域とハンドル角が大きな高横加速度旋回領域を含む全横加速度旋回領域において車両の運動状態を的確に制御して操縦安定性を高めることができる車両の運動制御装置を提供すること。
【解決手段】車速とハンドル角に基づいて目標ヨー角速度を算出し、算出された目標ヨー角速度と実際のヨー角速度との偏差が実質的に0になるよう車両の運動を制御するECU(制御手段)と、を備える車両の運動制御装置において、前記ECUは、ハンドル角が所定の閾値よりも小さい低横加速度旋回領域においてはハンドル角に比例する目標ヨー角速度を使用し、ハンドル角が前記閾値よりも大きい高横加速度旋回領域においてはハンドル角に依存しない最大横加速度で車両が定常円旋回するときのヨー角速度を目標ヨー角速度として使用して車両の運動を制御する。
(もっと読む)
自動走行制御装置
【課題】運転者の自動走行運転への適正な関わりを検出するとともに、運転者の自動走行運転に対する監視放棄を抑制することのできる自動走行制御装置を提供すること。
【解決手段】自動走行制御中の第1所定時間経過後に(S1)、車速を自動走行制御に基づく目標車速から運転監視確認用車速に減速させ(S2、S3)、所定期間内に運転者の反応が検出されなかった場合には(S4〜S9)、運転者への警告を発するとともに自動走行制御を停止する(S10)。
(もっと読む)
制動力制御装置
【課題】路面推定の精度を向上させることが可能な制動力制御装置を提供する。
【解決手段】制動力制御装置12では、前後Gセンサ42が検出した車両10の前後加速度である前後G検出値に基づいて路面推定を行う路面推定手段110と、ホイールシリンダ62a〜62dにかかるブレーキ液圧を増圧、減圧又は保持させることで、車輪18のロックを防止するアンチロック制御手段112とを備える。路面推定手段110は、アンチロック制御中に前記ブレーキ液圧が増圧又は増圧保持となっている車輪18の数に応じて前記前後G検出値を補正した前後G補正値に基づいて路面推定を行う。
(もっと読む)
車両制御装置
【課題】 ペダル吸い込まれ感をより低減できる車両制御装置を提供する。
【解決手段】 ブレーキペダルBPのストローク量を検出するストロークセンサ42と、ストローク量がSTrmax未満の場合、最大回生制動力Frmaxと等しい回生許容量Frstmaxにより制限された要求回生制動力Frreqを算出する第1回生制動力算出部32aと、ストローク量がSTrmax以上の場合、最大回生制動力Frmaxより小さい回生許容量Frstmaxにより制限された要求回生制動力Frreqを算出する第2回生制動力算出部32bと、要求回生制動力Frreqに基づいて実際に発生された回生制動力の検出値である実行回生制動力Frと液圧制動力との和が車両に必要な制動力である要求総制動力Freqとなるように、要求総制動力Freqと実行回生制動力Frとの差分を要求液圧制動力Fwcreqとして算出する制動制御部32cと、を有するBCU32を備えた。
(もっと読む)
車両の回生ブレーキ制御装置
【課題】比較的高速から低速まで一定の踏み込み量のブレーキペダル操作で減速をしても違和感の無い減速を可能とし、ABS作動時の減速感の途切れを抑えて運転者の不安感を解消することができる車両の回生ブレーキ制御装置を提供すること。
【解決手段】ABS装置と液圧ブレーキ及び回生ブレーキを備えた車両の液圧ブレーキによって発生する液圧制動力と回生ブレーキによって発生する回生制動力をABSの動作と車速に応じて制御して運転者が要求する制動力を得るとともに、回生ブレーキは、アクセルペダルの開放状態が検知されると「アクセルOFF回生制動力」を発生させ、ブレーキペダルの踏み込み操作が検知されると「ブレーキON回生制動力」を発生させ、ABS作動時に前記回生制動力をABS非作動時のそれよりも下げるよう制御する車両の回生ブレーキ制御装置において、回生制動力の低車速域の値が高車速域の値よりも大きくなるよう制御する。
(もっと読む)
ブレーキ制御システム
【課題】回生ブレーキの回生効率をより高める。
【解決手段】車両100の運動エネルギを利用して発電を行う回生ブレーキ101と、車両の運動エネルギを熱エネルギに変換する機械的ブレーキ200と、ブレーキペダル204を踏み込んでから機械的ブレーキ200が作動する前に回生ブレーキ101を作動させ、回生ブレーキ101の発電負荷が大きいほど、ブレーキペダル204を踏み込んでから機械的ブレーキ200が作動するまでの該ブレーキペダル204の踏込量を大きくし且つ回生ブレーキ101の発電電圧を低くする制御手段20と、を備える。
(もっと読む)
車両の駆動輪に働く駆動力を制限する駆動力制限装置
【課題】推定速度の精度を向上可能な駆動力制限装置を提供すること。
【解決手段】車両の駆動輪に働く駆動力を制限する駆動力制限装置は、前記車両の第1の加速度を補正して、補正された前記第1の加速度を第2の加速度として得る加速度補正部と、前記駆動輪の車輪速度及び前記第1の加速度に基づき前記車両の第1の速度を算出する第1の算出部と、前記車輪速度及び前記第2の加速度に基づき前記車両の第2の速度を算出する第2の算出部と、前記第1の速度と前記第2の速度との差が第1の閾値以上である場合、前記駆動力を制限する制限駆動力を要求する要求部と、前記第2の速度を前記車両の推定速度として用いる推定部と、を備える。前記要求部が前記制限駆動力を要求することによって、前記車輪速度が第2の閾値を下回る時、前記推定部は、前記第2の速度を前記第1の速度でリセットして前記推定速度を得る。
(もっと読む)
制動力制御装置
【課題】マスタシリンダ圧センサを必要としない制動力制御装置を提供する。
【解決手段】制動力制御装置はブレーキペダル31の操作により流体に圧力を発生させるマスタシリンダ33と、流体の圧力により制動力を発生させる制動装置37FL,37FR,37RL,37RRと、マスタシリンダと制動装置とを接続する配管と、配管内における流体の流れを遮断する第1の電磁弁(マスタカット弁41,42)と、制動装置に流れる流体の圧力を保持する第2の電磁弁(保持弁50,51,52,53)と、を備え、第1の電磁弁を制御する第1の差圧指示量と、第2の電磁弁を制御する第2の差圧指示量と、の差を所定値に制御することにより制動力を制御する。
(もっと読む)
ブレーキ制御装置およびブレーキ制御方法
【課題】走行条件や車両条件に応じてブレーキ力を制御し、滑走の発生頻度を低減させることを可能とするブレーキ制御装置およびブレーキ制御方法を得ること。
【解決手段】複数の車両により構成される列車を制動させるブレーキ力を演算するブレーキ力演算部5と、車両の車輪の滑走を検知した際の車両のブレーキノッチ位置および走行速度を含む走行情報、および滑走情報を記録し、走行情報と滑走情報とに基づいて滑走予測を行い、ブレーキ力に対する車両毎、台車毎、あるいは軸毎の分担ブレーキ力の割合を示すブレーキ分担率を演算する滑走抑制制御部12と、ブレーキ力とブレーキ分担率とに基づいて分担ブレーキ力を設定し、基礎ブレーキ装置にブレーキ制御信号を出力するブレーキ力設定部6と、を備える。
(もっと読む)
ブレーキ制御装置
【課題】モータ回転数の推定誤差を低減することができる装置を提供すること。
【解決手段】モータMの端子間電圧VmotとモータMの特性に基づいてモータMの回転数を推定するモータ回転数推定部4を有するコントロールユニットCPUを備えた。ブレーキ回路内のブレーキ液を流動させるポンプPを回転駆動するモータMの回転数ωを推定する際、モータ端子間電圧VmotとモータMの特性(イナーシャIや容積効率η等の諸元、及びトルク−回転数特性)に基づいて推定する。
(もっと読む)
電動車両の発進時ずり下がり防止制御装置
【課題】充電制限により回生制動が得られなくても、車両のずり下がりを確実に防止し得る装置を提供する。
【解決手段】充電制限中のDレンジ停車状態で瞬時t1以降、アクセル開度APO(モータトルクTTMA0)を増大させて行う発進操作中(当初はモータトルク指令値TTMA=TTMA0)、車両速度VSP≦-0.5km/hが0.1sec継続するt2に、ずり下がり防止制御を開始(flag_RSAON=1)。一方でTTMAを一定変化率β1で低下させt3に0となし、他方でブレーキトルク指令値TTBRK(ブレーキ液圧指令値TPMC)を一定変化率α1で、TTMA0と同じトルク値となるよう増大させ、摩擦制動により、ずり下がりを防止する。VSP=0が0.1sec継続する、ずり下がり防止完了時t5より、TTMAを一定変化率β2でTTMA0に復帰させ、TTBRK(TPMC)を一定変化率α2(=-β2)で0へ低下させる。
(もっと読む)
電動パーキングブレーキ装置
【課題】モータの惰性駆動による更なるケーブルへの張力付与を防止することで、アクチュエータとブレーキアッセンブリとの耐久性を向上させること。
【解決手段】ブレーキ作動を行なう場合、PWM回路により初期デューティ比を出力して電動モータを駆動し(時刻t1)、この初期デューティ比からデューティ比を上げて目標デューティ比を出力する(時刻t2)。予め設定した所定ブレーキ力よりΔL1より低い終了前目標ケーブル張力値TSにケーブルの張力が到達すると(時刻t3)、電動モータの回転数を低下させるべくデューティ比を目標デューティ比から終了前デューティ比へと下げる。ケーブル張力が所定ブレーキ力に達すると、デューティ比を0%として電動モータを停止させる(時刻t4)。
(もっと読む)
電動負圧ポンプの制御装置
【課題】ヒルホールド中における電動負圧ポンプの駆動頻度を低く抑えて該電動負圧ポンプの作動音や振動の発生を抑制するとともに、電力消費を抑えて電動負圧ポンプの耐久性向上を図ることができる電動負圧ポンプの制御装置を提供すること。
【解決手段】ブレーキブースタ5に負圧を供給する電動負圧ポンプ11と、ブレーキのマスタシリンダ6とホイールシリンダ7とを接続する液圧通路8を遮断してブレーキ力を保持するヒルホールド装置を備えた車両の前記電動負圧ポンプ11のコントローラ(制御装置)10は、前記ヒルホールド装置によって車両がヒルホールドされている間は前記電動負圧ポンプ11の駆動頻度を減少制御するようにする。又、前記ヒルホールド装置によって車両がヒルホールドされている間は前記電動負圧ポンプ11の駆動を開始しないようにする。
(もっと読む)
車両制御装置および車両制御方法
【課題】ブレーキペダルの踏み込み操作量を検出するためのセンサを設けることなく、アクセルペダルおよびブレーキペダルの同時踏み込みに起因する車両の加速や発進を抑える。
【解決手段】ピッチング現象による車両10の姿勢変化分に応じたピッチング補正値を算出する。このピッチング補正値と、機関ECU31により算出される内燃機関11の出力トルクと、加速度センサ34により検出した車両10の加速度とに基づいてブレーキペダル17の踏み込み操作力を推定する。その推定されるブレーキペダル17の踏み込み操作力が第2判定値以上であり、且つアクセルセンサ33により検出されるアクセルペダル22の踏み込み操作量が第1判定値以上であるときに、内燃機関11の出力トルクを制限する。
(もっと読む)
情報処理装置
【課題】道路の勾配を考慮した運転支援を行う。
【解決手段】情報処理装置1Aは、運転者による減速行動を検出する減速行動検出部21と、走行している道路の勾配情報を取得する勾配情報取得部22と、勾配情報を学習する勾配情報学習部23と、を備え、勾配情報学習部23は、減速行動検出部21により減速行動を検出した場合、所定の間、勾配情報取得部22により取得された勾配情報を学習する。
(もっと読む)
ハイブリッド車両の制御装置
【課題】摩擦締結要素のスリップ制御中にブレーキ操作があった場合に、協調回生制御トルクの増加を禁止することにより、意図しないスリップによるショックの発生を防止可能なハイブリッド車両の制御装置を提供する。
【解決手段】エンジンEngに第1摩擦締結要素CL1を介して締結されたモータジェネレータMGと、モータジェネレータMGと駆動輪との間に介装された摩擦締結要素CL2を含む有段の自動変速機ATと、メカニカルブレーキ操作に基づくブレーキコントローラ9からの目標ブレーキトルクBSと車速情報に基づく最大回生トルクとの差分から目標回生トルクを算出して協調回生制御を実行する協調回生制御実行手段10とを備えている。
協調回生制御実行手段10は、メカニカルブレーキ操作による目標ブレーキトルクBSの増加の判断と第2摩擦締結要素CL2がスリップ中であるか否かを判断する判断部M11と、目標ブレーキトルクBSの増加時でかつ摩擦締結要素CL2のスリップ中に回生トルクの増加を禁止する回生トルク増加禁止手段M11とを有する。
(もっと読む)
表示処理装置及び信号供給装置
【課題】外部の装置の停止状態の種別に応じた表示が可能な表示処理装置等を提供する。
【解決手段】表示処理装置は、外部の装置の状態を表す信号を受信する信号受信手段と、前記信号受信手段が受信した前記信号に応じた表示態様の表示を表示部に行わせる表示処理手段と、を備え、前記信号は、正常な停止状態を表す正常停止信号、又は、異常による停止状態を表す異常停止信号であることを含み、前記表示処理手段は、前記信号が、前記正常停止信号であるか、前記異常停止信号であるかで、前記表示態様を異ならせる。
(もっと読む)
電気自動車およびプログラム
【課題】様々な路面や走行条件下で安定した走行性を確保し、旋回性能を改善することができる電気自動車およびプログラムを提供する。
【解決手段】この電気自動車1は、前輪側の左右輪に第1の差動装置4fを介して制駆動力を伝達する第1の電気モータ3fと、後輪側の左右輪に第2の差動装置4rを介して制駆動力を伝達する第2の電気モータ3rと、第1および第2の電気モータ3f、3rの制駆動力を制御する制御部とを備え、第1および第2の差動装置4f、4rは、制御部により左右への動力配分率が制御可能な構成を有する。
(もっと読む)
車両の坂道発進支援ブレーキ装置およびその制御方法
【課題】運転者の操作を介さずに坂道等で停車状態を維持するのに必要なブレーキ力を保持するための方法を提供する。
【解決手段】本発明の一実施形態によれば、車両の停止中に車両の制動力を制御する方法が提供される。本方法は、(a)車両の停止を検出するステップと、(b)運転者によるブレーキ入力解除を検出するステップと、(c)運転者によるブレーキ入力解除時の車両の総ブレーキ力を算出するステップと、(d)車両の停止維持に必要なブレーキ力を計算するステップと、(e)算出された総ブレーキ力で車両の停止を維持できるかどうかを判断するステップと、(f)測定された総ブレーキ力で車両の停止を維持できないと判断されたときに、車両の総ブレーキ力を増加させるステップと、を有する。
(もっと読む)
1 - 20 / 189
[ Back to top ]