
Fターム[3D246JB05]の内容
ブレーキシステム(制動力調整) (55,256) | 制御方法 (3,867) | 基準値設定 (1,293) | 変更 (322)
Fターム[3D246JB05]に分類される特許
1 - 20 / 322
車両挙動制御装置
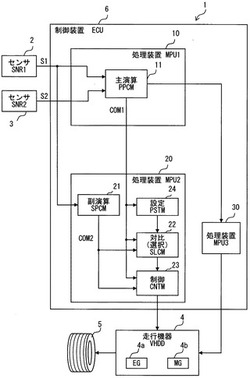
【課題】主処理装置が異常になっても、車両の挙動を安定的に制御する。
【解決手段】第1の処理装置10は、車両の利用者からの要求を入力する要求入力センサ2を含む複数のセンサ2、3からの複数の信号を含む第1の情報に基づいて、第1の制御量COM1を演算する。第2の処理装置20は、要求入力センサ2からの信号を含むが、第1の情報より情報量が少ない第2の情報に基づいて、第2の制御量COM2を演算する。第2の処置装置20は、第1の制御量COM1が第2の制御量COM2から許容範囲TH内であると判定されるとき、第1の制御量COM1に基づいて走行機器4を制御する。第2の処置装置20は、第1の制御量COM1が第2の制御量COM2から許容範囲TH外であると判定されるとき、車両の運動量が小さくなる制御量、または車両の運動量の変化が小さい制御量に基づいて走行機器4を制御する。
(もっと読む)
車両用制動力制御装置

【課題】ブレーキ操作時、ドライバーによるペダル操作状態にかかわらず、ドライバーに与えるブレーキ操作違和感を防止すること。
【解決手段】車両用制動力制御装置は、ブレーキペダル1と、電動ブースタ2と、マスターシリンダ3と、第1目標MC圧分算出部66と、第2目標MC圧分算出部67と、S-P変化率算出部70と、F-P変化率リミット部71と、目標減速度算出部69と、を備える。S-P変化率算出部70は、ストロークベース目標MC圧分の算出に至るまでの演算処理系列にて得られるストローク相当値としてのストロークベース目標MC圧の変化率を算出する。F-P変化率リミット部71は、踏力ベース目標MC圧分の算出に至るまでの演算処理系列にて得られる踏力相当値である踏力ベース目標MC圧の変化率を、ストロークベース目標MC圧の変化率が小さいほど制限する。
(もっと読む)
路面摩擦係数推定装置および車両用ブレーキ液圧制御装置
【課題】横加速度に基づく路面摩擦係数の推定を精度よく行うことを目的とする。
【解決手段】路面摩擦係数推定装置は、横加速度に基づいて第1の路面摩擦係数CF1を推定する第1の推定手段25と、前後加速度に基づいて第2の路面摩擦係数CF2を推定する第2の推定手段26と、路面摩擦係数CF1,CF2の小さい方を路面摩擦係数CFとする選択手段27を備える。選択手段27は、路面限界を超える操舵が行われているか否かを判定する限界操舵判定部を有し、路面限界を超える操舵が行われていると判定したときは、前記第1の路面摩擦係数と前記第2の路面摩擦係数とのうちいずれか小さい方を路面摩擦係数CFとして選択し、路面限界を超える操舵が行われていないと判定したときは、前記第2の路面摩擦係数を路面摩擦係数CFとして選択する。
(もっと読む)
ブレーキ制御装置
【課題】ブレーキ操作時、ペダルストロークに対するホイールシリンダ液圧特性の段付きとペダル反力の変動を小さく抑えることで、ペダルフィールの違和感を緩和すること。
【解決手段】ブレーキ制御装置は、マスターシリンダ13と、VDCブレーキ液圧ユニット2と、マスターシリンダ液圧センサ24と、ブレーキコントローラ7と、を備える。VDCブレーキ液圧ユニット2は、ブレーキ液を吸い込んで吐出する液圧ポンプ22によりポンプアップ液圧を発生する。マスターシリンダ液圧センサ24は、運転者によるブレーキ操作速度を検知する。ブレーキコントローラ7は、ブレーキ操作速度が所定値以上の場合、ポンプアップ液圧によりホイールシリンダ4FL,4FR,4RL,4RRへの液圧を所定値まで増加させる際、ペダルストロークがリザーバポートの閉鎖位置に達するまでのポンプアップ液圧増加速度よりも、ペダルストロークがリザーバポートの閉鎖位置を通過した後のポンプアップ液圧増加速度を遅くする(図3)。
(もっと読む)
車両用制動力制御装置
【課題】ブレーキ操作時であって、マスターシリンダピストンの移動速度であるピストン速度が速いとき、ドライバーに与えるブレーキ操作違和感を防止すること。
【解決手段】車両用制動力制御装置は、ブレーキペダル1と、電動ブースタ2と、マスターシリンダ3と、乖離量算出部60と、ペダル踏力算出部61と、目標減速度算出部69と、を備える。乖離量算出部60は、プライマリピストン11のピストン速度が速いほど大きくなるペダル踏力の過渡的変化分を補正値Hとして算出する。ペダル踏力算出部61は、マスターシリンダ圧に基づくペダル踏力(e-ACT反力)を、補正値Hにより補正することで制御用ペダル踏力を算出する。
(もっと読む)
車両の制動制御装置
【課題】車両の制動制御装置において、制動制御の切換え時における車両の走行安定性の向上を可能とする。
【解決手段】左右の後輪RL,RRのスリップ率に応じてブレーキ油圧回路27により左右のホイールシリンダ25を同時に制御する制動力同時制御モードを実行可能な制動力同時制御モード実行部51と、左右のホイールシリンダ25を独立して制御する制動力独立制御モードを実行可能な制動力独立制御モード実行部52と、車両11の減速度が予め設定された減速度閾値を越えたら制動力同時制御モードから制動力独立制御モードへ切換可能な切換制御部53と、車両11の減速度勾配の上昇に応じて減速度閾値を低下させる切換閾値変更部54とを設ける。
(もっと読む)
電動車両のブレーキ制御装置
【課題】回生協調ブレーキ制御時、ブレーキパッドとロータとの間にクリアランス変化が発生しても、良好なブレーキフィーリングと回生エネルギーの確保を達成すること。
【解決手段】ハイブリッド車のブレーキ制御装置は、マスターシリンダと、ホイールシリンダと、VDCブレーキ液圧ユニットと、モータコントローラと、統合コントローラと、を備える。統合コントローラは、ブレーキ操作時、目標減速度を基本液圧分と上乗せ制動分(回生分と加圧分)で達成する回生協調ブレーキ制御を行う。そして、推定したブレーキパッドとロータとの間のクリアランス量が設計値のクリアランス量に対して変化する場合に、実MC圧発生ポイントでの目標減速度が、上乗せ制動分の最大値となるように、設計値からのクリアランス変化量に応じて目標減速度特性を設定する。
(もっと読む)
車両の制動制御装置
【課題】車両の制動制御装置において、制動時における車両の挙動を安定させることで安全性の向上を可能とする。
【解決手段】ECU41として、車輪FR〜RLのスリップが抑制されるように制動装置22を作動制御するABS制御装置51と、車両11の周辺情報に基づいて制動装置22を作動制御する自動制動制御装置52と、ABS制御装置51の作動開始の閾値を自動制動制御装置52の非作動時より自動制動制御装置52の作動時の方が小さくなるように変更する作動開始閾値変更装置とを設ける。
(もっと読む)
車両用ブレーキ液圧制御装置
【課題】前輪用の車輪ブレーキおよび後輪用の車輪ブレーキに作用せしめるブレーキ液圧を個別に増減調整可能な液圧調整ユニットの作動を、同軸上にある左右の前輪および後輪用の車輪ブレーキのブレーキ液圧間で許容される許容差圧となるように制御する車両用ブレーキ液圧制御装置において、高摩擦係数の路面であることを精度よく判定して許容差圧を充分に大きく設定可能とする。
【解決手段】車両の推定車体減速度を推定車体減速度算出手段26が算出し、許容差圧設定手段27が、路面摩擦係数に対応した許容差圧を推定車体減速度算出手段26が算出した推定車体減速度に基づいて設定する。
(もっと読む)
車両用ブレーキ液圧制御装置
【課題】前輪用の車輪ブレーキおよび後輪用の車輪ブレーキに作用せしめるブレーキ液圧を個別に増減調整可能な液圧調整ユニットの作動を、同軸上にある左右の前輪および後輪用の車輪ブレーキのブレーキ液圧間で許容される許容差圧となるように制御する車両用ブレーキ液圧制御装置において、路面の摩擦係数に安定して対応した許容差圧が得られるようにする。
【解決手段】制御対象の車輪と同軸上にある他の車輪の車輪ブレーキのアンチロックブレーキ制御に伴う減圧開始時の液圧であるロック液圧をロック液圧取得手段29が取得し、許容差圧設定手段27は、少なくともロック液圧取得手段29で得たロック液圧に基づいて路面摩擦係数に対応した許容差圧を設定する。
(もっと読む)
車両のブレーキ制御装置
【課題】エンジンを自動停止した後にエンジンの再始動に失敗し、その後のポンピングブレーキ操作等によってエンジンの吸気負圧が減少した場合であっても、制動力の低下を防ぐことができる車両のブレーキ制御装置を提供すること。
【解決手段】エンジン自動停止・再始動制御手段と、作動中のエンジン1の吸気負圧を利用して運転者のブレーキ踏力をアシストするブースタ(踏力アシスト手段)14と、電動モータ26によって駆動されるポンプによって所要のブレーキ液圧を発生する加圧制御ユニット21と、を備えた車両のブレーキ制御装置(ECU)13において、再始動条件の成立後にエンジン1の再始動が確認できない状態で車両が走行している場合であって、且つ、ブースタ14の負圧が設定値以上(負圧不足)であるときには加圧制御ユニット21によってブレーキ液圧を加圧してブースタ14によるアシスト力の不足を補うようにする。
(もっと読む)
車両の走行制御装置
【課題】制動条件の異なる2以上の制御モードを協調して車両を走行制御する際に、制御モードの切替を適切に行うことを可能とする。
【解決手段】互いに異なる制動条件で車両を制駆動制御する2以上の制御モードを協調制御して、走行状態に基づき採用する制御モードを切り替える車両の走行制御装置4である。走行路の勾配の状態に応じて、カーブ減速制御モードから一定速制御モードへの切替の閾値を変更する。具体的には、下り勾配であるほど、上記閾値を高くする。
(もっと読む)
走行制御装置
【課題】 ドライバに与える違和感を軽減できる走行制御装置を提供する。
【解決手段】 自車走行路前方の車幅方向と高さ方向による走行路および障害物を検出し、走行路前方の立体空間を検出する立体空間検出部11と、検出された立体空間に対し、自車の障害物に対する衝突リスクの高さを推定する衝突リスク推定部12と、推定された衝突リスクの高さに応じて、衝突リスクが高い部分から距離を取るように自車の目標経路を演算する目標経路演算部13と、演算された推奨経路に基づいて運転支援を行う運転支援部14と、を備えた。
(もっと読む)
車両のブレーキ制御装置
【課題】 作動液の脈動が発生した場合に、ブレーキ操作フィーリングを成立させながらリニア制御弁の過度の作動を抑えて信頼性を確保する。
【解決手段】 作動液の液圧が低い場合には、液圧の脈動振幅が小さくなるという特性がある。また、作動液の液圧が低い場合には、液圧剛性が低くなってブレーキ応答が遅れる。そこで、作動液の脈動が発生した場合には、検出液圧の脈動の中心値を表す液圧Pxaveに基づいて、液圧Pxaveが低い場合には高い場合に比べて小さな制御開始閾値Xを設定する。
(もっと読む)
車両挙動制御装置および車両挙動制御方法
【課題】車両の走行状態に応じた挙動制御をより適切に行うと共に、アクチュエータの耐久性の低下を抑制する。
【解決手段】車体の上下挙動を取得し、取得した上下挙動が閾値th1よりも大きいときに、上下挙動に応じて目標制動力Pbを制御する。また、取得した上下挙動が閾値th2(th2>th1)よりも大きいときに、目標制動力Pbを0に制限する。また、減速感を抑制するために、目標制動力Pbを上限値Pmax以下に制限すると共に、立ち上げ時には演算周期毎の増加量をΔPu以下に制限する。その後は、上下挙動の低減に伴って、目標制動力Pbを減圧させてゆく。このときは、制動力の消失感を抑制するために、演算周期毎の減少量をΔPd以下に制限する。
(もっと読む)
車両の運動制御装置
【課題】簡単な構成でハンドル角が小さな低横加速度旋回領域とハンドル角が大きな高横加速度旋回領域を含む全横加速度旋回領域において車両の運動状態を的確に制御して操縦安定性を高めることができる車両の運動制御装置を提供すること。
【解決手段】車速とハンドル角に基づいて目標ヨー角速度を算出し、算出された目標ヨー角速度と実際のヨー角速度との偏差が実質的に0になるよう車両の運動を制御するECU(制御手段)と、を備える車両の運動制御装置において、前記ECUは、ハンドル角が所定の閾値よりも小さい低横加速度旋回領域においてはハンドル角に比例する目標ヨー角速度を使用し、ハンドル角が前記閾値よりも大きい高横加速度旋回領域においてはハンドル角に依存しない最大横加速度で車両が定常円旋回するときのヨー角速度を目標ヨー角速度として使用して車両の運動を制御する。
(もっと読む)
車両のエンジン自動停止制御装置
【課題】 走行中においても適切なエンジン停止及び再始動を達成可能な車両のエンジン自動停止制御装置を提供すること。
【解決手段】 本発明の車両のエンジン自動停止制御装置では、走行中に運転者がブレーキペダルを所定の閾値以上操作したときにエンジンを停止するにあたり路面摩擦係数が小さいほど所定の閾値を大きくすることとした。
(もっと読む)
発進補助装置およびこれを搭載した発進補助車両
【課題】車高が変化した場合であっても車体の傾斜状態から路面の傾斜状態を適正に推定して確実に発進補助を行う。
【解決手段】ブレーキペダル9に対する操作に応じて制動力を発生するディスクブレーキ8と、車体1の前後加速度G(傾斜状態)を検出する前後Gセンサ14と、前後Gセンサ14の検出結果に基づいて路面の傾斜度合いB’を推定する路面状態推定部45と、路面の傾斜度合いB’に基づいて路面が坂道であると判定された場合、ブレーキペダル9に対する操作の解除後にもディスクブレーキ8に制動力を保持させる発進補助装置11において、エアスプリング5のストロークSを検出するストロークセンサ18を更に備え、路面状態推定部45が、前後加速度Gに基づく路面(車体)の傾斜度合いBをストロークSを用いて補正することで路面の傾斜度合いB’を正確に推定できるようにする。
(もっと読む)
車両用制動支援装置
【課題】坂路にて自車両の停止中に自動制動の制動力を解除した際に、自車両の動作が運転者が意図しないものになることを防止する。
【解決手段】車両用衝突回避制動支援装置1は、障害物との接近に関するリスクポテンシャルを算出するリスクポテンシャル演算部31と、走行路の勾配を検出する外乱推定部32と、自車両が停止中に、リスクポテンシャルに基づき自車両に付与した制動力を解除する際のその減少度合いを、リスクポテンシャル及び走行路の勾配に基づいて変更する制動力演算部40とを備える。
(もっと読む)
ブレーキシステム
【課題】 連動ブレーキシステムとABSを採用した自動二輪車において、ブレーキレバーを単独操作して前輪ブレーキに制動力を発生させた状態で前輪ABSが作動したときの減速度を大きくする。
【解決手段】 ブレーキバイワイヤ方式の連動ブレーキシステムにおいて、ブレーキレバーのみから入力したとき前輪ブレーキに制動力を発生させるとともに、後輪ブレーキにも連動した制動力を発生させる。この状態で前輪ABSが作動すると、前輪ブレーキの制動力が一定となり、トータル制動力は.△Frだけ低下する。そこで、後輪側液圧モジュレータ22Rを駆動して、後輪ブレーキの制動力を理想配分特性によって定まるて後輪限界目標圧Prmaxに向けて増大させる。
(もっと読む)
1 - 20 / 322
[ Back to top ]