
Fターム[3D246JB06]の内容
ブレーキシステム(制動力調整) (55,256) | 制御方法 (3,867) | 基準値設定 (1,293) | 複数設定 (128)
Fターム[3D246JB06]の下位に属するFターム
ヒステリシスの設定 (14)
Fターム[3D246JB06]に分類される特許
1 - 20 / 114
衝突被害軽減装置
車両の制御装置
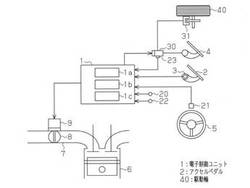
【課題】アクセルの誤操作を適切に判定することにより、駆動力低下によるドライバビリティの悪化を抑えることのできる車両の制御装置を提供する。
【解決手段】電子制御ユニット1は、駆動輪40の駆動力を低下させる駆動力低下制御を実行する。そして電子制御ユニット1は、車両進行方向における障害物の接近を検出してから所定の判定時間が経過した後にアクセルペダル2が操作されたときには、駆動力低下制御として駆動輪40の制動を行う。
(もっと読む)
車両の制動制御装置

【課題】車両の制動制御装置において、制動制御の切換え時における車両の走行安定性の向上を可能とする。
【解決手段】左右の後輪RL,RRのスリップ率に応じてブレーキ油圧回路27により左右のホイールシリンダ25を同時に制御する制動力同時制御モードを実行可能な制動力同時制御モード実行部51と、左右のホイールシリンダ25を独立して制御する制動力独立制御モードを実行可能な制動力独立制御モード実行部52と、車両11の減速度が予め設定された減速度閾値を越えたら制動力同時制御モードから制動力独立制御モードへ切換可能な切換制御部53と、車両11の減速度勾配の上昇に応じて減速度閾値を低下させる切換閾値変更部54とを設ける。
(もっと読む)
車両の衝突時安全装置
【課題】車両衝突時の二次被害を防止および軽減する衝突時安全装置に関し、エアバッグが展開しないような軽度の衝突時の安全策も含めて、簡単な制御によって二次被害を防止および軽減することを目的とする。
【解決手段】自動ブレーキ制御装置5と、エンジン制御装置7と、加速度センサ15と車速センサ17からの信号に基づいて、エアバッグ21、自動ブレーキ制御装置5およびエンジン制御装置7を制御する衝突制御装置9とを備え、衝突制御装置9は衝突時の加速度の大きさを基に重度衝突と軽度衝突とを判定し、重度衝突と判定した場合には、エアバッグを作動させると同時に、自動ブレーキをフルブレーキ状態とし且つエンジンを停止状態にし、軽度衝突と判定した場合には、エアバッグを作動させずに、自動ブレーキを衝突時の加速度に対応した中間ブレーキ力とし且つエンジンを停止状態にすることを特徴とする。
(もっと読む)
車両の制動制御装置
【課題】各モータのうち何れか一つのモータが過熱モータになった場合に、該過熱モータを保護するためのモータ保護制御の実行機会を増やすことができると共に、該モータ保護制御に伴う車両挙動の変化を補正するための車両操作を容易なものとすることができる車両の制動制御装置を提供する。
【解決手段】各車輪に個別対応する各電動ブレーキ装置はモータをそれぞれ備える。各電動ブレーキ装置を制御するブレーキ用ECUは、温度Tが第1の設定閾値Tth1以上となる過熱モータがあるか否かを判定する。そして、ブレーキ用ECUは、過熱モータが一つのみである場合(第3のタイミングt3)、過熱モータに対する電流値Ixを過熱モータの温度Tが低温である場合には高温である場合よりも緩やかな勾配で低下させる。
(もっと読む)
車両の制動力制御装置
【課題】車両旋回時のタイヤのコーナリングフォースを有効に最大限発揮させ、安定した車両挙動でカーブ外側へのコースアウトを確実に防止する。
【解決手段】車速V、ハンドル角θHに基づいて目標横加速度を算出し、目標横加速度と実際の横加速度とに基づいて車両1に付加すべき第1の付加ヨーモーメントMzt1を算出し、目標横加速度と実際の横加速度とに基づいて第1の付加ヨーモーメントMzt1に加えて車両1に付加すべき第2の付加ヨーモーメントMzt2を算出し、第1の付加ヨーモーメントMzt1に基づいて旋回内側車輪に付加する制動力を第1の制動力FB1として算出し、第2の付加ヨーモーメントMzt2に基づいて旋回内側車輪と旋回外側車輪との間の制動力差を変えることなく車両1に付加する制動力を第2の制動力FB2として算出し、第1の制動力FB1と第2の制動力FB2に基づいて各輪に付加する制動力を算出する。
(もっと読む)
車両挙動制御システム
【課題】車両の挙動を安定化させることができる車両挙動制御システムを提供することを目的とする。
【解決手段】車両2の各車輪3に生じる制動力を個別に調節可能な制動装置7と、制動装置7を制御して車輪3のスリップ状態を制御するABS制御及び車両2の旋回状態を制御する旋回制御を実行可能な制御装置8とを備え、制御装置8は、ABS制御及び旋回制御の作動中に、車両2に作用する横方向加速度の絶対値が予め設定された所定加速度以下である場合に制動力の増加勾配を制限する一方、横方向加速度の絶対値が所定加速度より大きい場合に制動力の増加勾配を制限せず、さらに、制御装置8は、旋回制御における旋回制御量の絶対値が予め設定された所定制御量より大きい場合には制動力の増加勾配を制限しない。
(もっと読む)
車両操作支援装置
【課題】障害物の移動状態に応じた車両の操作支援を実行可能な車両操作支援装置を提供すること。
【解決手段】自車に対する障害物を検知し、その検知結果を用いて少なくとも障害物と自車との相対速度及び相対距離を検出する障害物検知手段M1を備え、検出の結果に基づいて障害物に対する回避支援を行う車両操作支援装置Uにおいて、自車速度と相対速度と相対距離とに基づいて、障害物が回避支援の対象となるか否かを判定する回避支援対象判定手段M2を備え、相対速度が自車速度と略等しい場合に、障害物を、少なくとも車両進行方向に移動していない停止障害物であると判定し、相対速度が自車速度と異なる場合にて、相対速度と相対距離とに基づいて算出した衝突余裕時間の単位時間当たりの減少量が所定の減少量以上の場合は、障害物を急接近障害物と判定し、所定の減少量未満の場合は、障害物をその他の障害物と判定する。
(もっと読む)
車両挙動制御装置および車両挙動制御方法
【課題】車両の走行状態に応じた挙動制御をより適切に行うと共に、アクチュエータの耐久性の低下を抑制する。
【解決手段】車体の上下挙動を取得し、取得した上下挙動が閾値th1よりも大きいときに、上下挙動に応じて目標制動力Pbを制御する。また、取得した上下挙動が閾値th2(th2>th1)よりも大きいときに、目標制動力Pbを0に制限する。また、減速感を抑制するために、目標制動力Pbを上限値Pmax以下に制限すると共に、立ち上げ時には演算周期毎の増加量をΔPu以下に制限する。その後は、上下挙動の低減に伴って、目標制動力Pbを減圧させてゆく。このときは、制動力の消失感を抑制するために、演算周期毎の減少量をΔPd以下に制限する。
(もっと読む)
電動パーキングブレーキ制御システム
【課題】部品点数を増加させることなく、温度に応じた目標荷重値を設定することができる電動パーキングブレーキ制御システムを提供することを目的とする。
【解決手段】車両の車輪を制動するパーキングブレーキと、前記パーキングブレーキをコントロールケーブルを介して作動または解除するアクチュエータと、外気温センサと、荷重センサと、前記アクチュエータを制御する制御部とを備えた電動パーキングブレーキ制御システムであって、前記制御部は、連続する複数の温度領域に区分された温度領域情報に基づいて、前記外気温センサからの外気温の時系列において、前記パーキングブレーキの作動より以前の所定時間内における外気温が属する温度領域のうちの低温度側の温度領域を特定し、特定された温度領域に応じた目標荷重値まで到達するように前記アクチュエータの駆動を制御することを特徴とする電動パーキングブレーキ制御システムを用いる。
(もっと読む)
制動力制御装置
【課題】路面推定の精度を向上させることが可能な制動力制御装置を提供する。
【解決手段】制動力制御装置12では、前後Gセンサ42が検出した車両10の前後加速度である前後G検出値に基づいて路面推定を行う路面推定手段110と、ホイールシリンダ62a〜62dにかかるブレーキ液圧を増圧、減圧又は保持させることで、車輪18のロックを防止するアンチロック制御手段112とを備える。路面推定手段110は、アンチロック制御中に前記ブレーキ液圧が増圧又は増圧保持となっている車輪18の数に応じて前記前後G検出値を補正した前後G補正値に基づいて路面推定を行う。
(もっと読む)
車両用運転操作支援装置
【課題】車両を減速させる運転操作支援の制御において違和感が生じることなく運転操作支援を行う。
【解決手段】ナビゲーション装置3からの道路情報に基づいて進路上にカーブが有る場合に、カーブ開始位置の目標地点の目標速度まで減速させるための高低2つの減速ラインを設定し、車速の高低に応じていずれか一方の減速ラインで減速させるために車速が減速ラインを超えていたらナビゲーション装置や画面表示可能な装置で減速の表示を行い、さらにアクセル反力を発生させたり、ブレーキによる制動を行ったりし、かつ目標地点近傍にそれらの制御を解除する不感帯を設ける。目標地点に近付いて複数の減速ライン間が狭まることにより、隣接する減速ラインを交互に制御の基準として異なる種類の制御が行われることによる運転者に与えてしまう違和感を防止し得る。
(もっと読む)
車両用ブレーキ液圧制御装置
【課題】運転者が打音の原因を把握できない状況下において常閉型電磁弁から発生する打音を抑えることができる車両用ブレーキ液圧制御装置を提供することを目的とする。
【解決手段】車両用ブレーキ液圧制御装置の制御部は、常閉型電磁弁への駆動電流を目標電流値C1まで瞬時に第1勾配で上昇させる応答性優先制御と、常閉型電磁弁への駆動電流を、第1勾配よりも緩やかな第2勾配を用いて目標電流値C1まで上昇させる静粛性優先制御と、常閉型電磁弁への駆動電流を、第1勾配よりも緩やかで、かつ、第2勾配よりも急な第3勾配を用いて目標電流値C1まで上昇させる中間制御と、を液圧制御モードに応じて切り替えて、常閉型電磁弁を制御する。
(もっと読む)
先行車追従走行装置
【課題】燃費の悪化が抑制でき、且つ、先行車に対する追従性も良好な先行車追従走行装置を提供する。
【解決手段】先行車追従制御において、摩擦ブレーキ開始閾値式(L1)、エンジンブレーキ開始閾値式(L2)、加速制御終了閾値式(L3)を用いて、摩擦ブレーキ開始閾値、エンジンブレーキ開始閾値、加速制御終了閾値を逐次算出する。そして、エンジンブレーキ開始閾値と加速制御終了閾値の間を等速領域とし、KdB_cの現在値が等速領域にあれば等速制御を行う。等速制御を行うことができる結果、加減速の頻度が低下するので、燃費の悪化が抑制できる。また、減速の頻度が少なくなることにより、割り込み車が加速した場合や、先行車が減速後、再加速した場合に、先行車に追従するための加速が少なくて済むので、追従性も良好となる。
(もっと読む)
車両の衝突予防安全装置
【課題】衝突予防機能を害することなく低消費電力に寄与することができる車両の衝突予防安全装置を提供する。
【解決手段】自車前方の先行車を認識すると共に当該先行車との距離を測定する先行環境認識部による認識結果などを用いて車両の衝突予防安全処理を行う衝突予防安全装置において、自車が高速道路の合流地点以外を走行中であり、周囲所定範囲に他車が存在せず、自車の前方に見通し可能な第1距離以上の道路が存在しているという条件を満足するとき、自車の前方の道路の距離に応じて先行環境認識部による先行車の認識及び測距の処理を軽減する制御を行う。
(もっと読む)
ブレーキシステム
【課題】回生協調制御における制動力変動や減速度変動を抑制する。
【解決手段】各ブレーキのブレーキキャリパ21a〜dを動作させるマスタ圧発生装置200、ホイール圧発生装置300、回生制動装置18と、これらのアクチュエータ200、300、18を制御するブレーキ制御装置100とを備え、ブレーキ制御装置100は、ブレーキキャリパ21a〜dで出力する摩擦制動力と、回生制動装置18が出力する回生制動力を求める制動力算出部111、各制動力に応じた制動力信号を各アクチュエータ200、300、18に出力する通信制御部112と、を備え、ペダル反力とマスタシリンダを加圧するピストンの変位量とに基づいて総制動力を調整することにより、車速の低下に応じて回生制動から摩擦制動に移行する際に、総制動力が略一定となるようにしたブレーキシステム。
(もっと読む)
車両の駆動輪に働く駆動力を制限する駆動力制限装置
【課題】推定速度の精度を向上可能な駆動力制限装置を提供すること。
【解決手段】車両の駆動輪に働く駆動力を制限する駆動力制限装置は、前記車両の第1の加速度を補正して、補正された前記第1の加速度を第2の加速度として得る加速度補正部と、前記駆動輪の車輪速度及び前記第1の加速度に基づき前記車両の第1の速度を算出する第1の算出部と、前記車輪速度及び前記第2の加速度に基づき前記車両の第2の速度を算出する第2の算出部と、前記第1の速度と前記第2の速度との差が第1の閾値以上である場合、前記駆動力を制限する制限駆動力を要求する要求部と、前記第2の速度を前記車両の推定速度として用いる推定部と、を備える。前記要求部が前記制限駆動力を要求することによって、前記車輪速度が第2の閾値を下回る時、前記推定部は、前記第2の速度を前記第1の速度でリセットして前記推定速度を得る。
(もっと読む)
牽引車両の制御装置
【課題】4輪駆動車の前後軸間の駆動力配分制御と牽引走行における揺動抑止制御とを適切に協調して行い、最適な揺動抑止効果を安定して得る。
【解決手段】牽引車両100の走行状態に基づいて該牽引車両100に発生する揺動状態を検出し、検出した牽引車両100の揺動状態に基づいて該揺動を抑制する制御の実行を判定し、揺動を抑制する制御を実行すると判定した場合にブレーキ制御部32に信号を出力して制動力により牽引車両にヨーモーメントを発生させて揺動を抑制する等の制御を実行させると共に、この揺動を抑制する制御を実行する場合に前後駆動力配分制御部31によるトランスファクラッチトルクTlsdを前後軸間の駆動力配分を前軸側に多く移動補正して出力させる。
(もっと読む)
自動車用の制動装置および制動方法
【課題】自動車用の制動装置および制動方法を提供する。
【解決手段】可変特性曲線に従って、運転者が操作できるブレーキペダル装置12と、ブレーキペダル装置12の操作量に対応し、かつ可変特性曲線に対応する制動効果で自動車を制動する制動ユニット20と、可能特性曲線領域を保存するメモリ装置16と、可能特性曲線領域から可変特性曲線を選択するために設けられた制御ユニット14とを有する、自動車用の制動装置および制動方法を提供する。
(もっと読む)
車両の運転支援装置
【課題】前方障害物との衝突を回避するために、ドライバが旋回操作で障害物との衝突を回避できたと感じた場合に、障害物とドアミラーとの接触も確実に防止して、障害物、ドアミラー等の破損を確実に防止する。
【解決手段】制御ユニット10は、自車両と前方障害物との衝突の可能性があるか否かを判定し、衝突の可能性がある場合には、旋回操作があるか否かを判定し、旋回操作が行われない場合には、そのまま制動力を設定してブレーキ駆動部20に出力する一方、旋回操作が行われた場合には、ドアミラー電動格納機構33にドアミラー格納信号を出力して左右の電動ドアミラー本体30を後方に回動させて車体側面に沿って格納すると共に、制動力を設定してブレーキ駆動部20に出力する。
(もっと読む)
1 - 20 / 114
[ Back to top ]