
車両の衝突予防安全装置

【課題】衝突予防機能を害することなく低消費電力に寄与することができる車両の衝突予防安全装置を提供する。
【解決手段】自車前方の先行車を認識すると共に当該先行車との距離を測定する先行環境認識部による認識結果などを用いて車両の衝突予防安全処理を行う衝突予防安全装置において、自車が高速道路の合流地点以外を走行中であり、周囲所定範囲に他車が存在せず、自車の前方に見通し可能な第1距離以上の道路が存在しているという条件を満足するとき、自車の前方の道路の距離に応じて先行環境認識部による先行車の認識及び測距の処理を軽減する制御を行う。
【解決手段】自車前方の先行車を認識すると共に当該先行車との距離を測定する先行環境認識部による認識結果などを用いて車両の衝突予防安全処理を行う衝突予防安全装置において、自車が高速道路の合流地点以外を走行中であり、周囲所定範囲に他車が存在せず、自車の前方に見通し可能な第1距離以上の道路が存在しているという条件を満足するとき、自車の前方の道路の距離に応じて先行環境認識部による先行車の認識及び測距の処理を軽減する制御を行う。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、車両の衝突予防安全装置に関し、特に電気自動車における先行車の認識と測距の処理に適用して有効な技術に関する。
【背景技術】
【0002】
車両の衝突予防を行う技術として、搭載したカメラやレーザレーダ装置等により前方の走行環境を検出し、この走行環境データから障害物や先行車を認識して、自車両の目標減速度を設定することで、障害物や先行車に対して車間距離を一定に保ちながら走行(追従走行制御)する走行制御技術が数多く提案されている。例えば特許文献1には、車間距離が最終目標距離以下となったときのブレーキ制御用の目標減速度を、最終目標距離に対して車間距離が占める割合に応じて可変設定することにより、先行車に対するプリクラッシュ制御を前提としたブレーキの自動介入制御時においても、過剰な減速度による減速を防止して、先行車との関係に応じ、ドライバのフィーリングに合った適切な減速度で減速制御を行うことができるようにする技術が記載される。ここでは、前方の走行環境を検出するためにステレオカメラによる撮像データの画像処理を行って、自車走行路を推定したり自車走行路上の先行車を検出したりすることが記載される。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2009−149167号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
車両の衝突予防安全装置における前方の走行環境を検出する動作は、ステレオカメラよりステレオ画像認識装置に車両前方の画像が送られ、ステレオ画像認識装置がその画像を解析して先行車両との距離を計算する。計算された距離などに基づいて危険が迫っていると判断されたときはエンジンやブレーキの電子制御装置(ECU)に命令を出して危険を回避するようにドライバーに指示し、或いはその衝突を回避するような制御、衝突した時の被害を軽減させる装置を作動させるなどの衝突予防安全処理が行われる。
【0005】
画像認識により前方を監視する場合には、車速を考慮して通常は1秒間に10枚〜30枚の画像をステレオカメラからステレオ画像認識装置に送り、画像認識を繰り返し行っている。画像認識処理は非常に計算量が多く、そのためステレオ画像認識装置及びカメラの消費電力が大きくなる。特に内燃機関エンジン自動車やハイブリッド自動車に比べて電気自動車の場合には走行駆動系以外で使用できる電力に大きな制限を受けることが予想されるので、車両の衝突予防安全装置についても低消費電力が必要であることが本発明者によって見出された。
【0006】
本発明の目的は、衝突予防機能を害することなく低消費電力に寄与することができる車両の衝突予防安全装置を提供することにある。
【0007】
本発明の前記並びにその他の目的と新規な特徴は本明細書の記述及び添付図面から明らかになるであろう。
【課題を解決するための手段】
【0008】
本願において開示される発明のうち代表的なものの概要を簡単に説明すれば下記の通りである。
【0009】
すなわち、自車前方の先行車を認識すると共に当該先行車との距離を測定する先行環境認識部による認識結果などを用いて車両の衝突予防安全処理を行う衝突予防安全装置において、自車が高速道路上の合流地点以外を走行中であり、周囲所定範囲に他車が存在せず、自車の前方に見通し可能な第1距離以上の道路があってその間に他車が存在しない所定の安全確認距離が存在しているという条件を満足するとき、自車の前方の安全確認距離に応じて先行環境認識部による先行車の認識及び測距の処理を軽減する制御を行う。
【0010】
上記条件を満足することにより走行中の安全を確保でき、この状態を基点に安全を保証できる前方の安全確認距離の範囲で先行環境認識部による先行車の認識及び測距の処理を軽減することにより、衝突予防機能が害されることなく低消費電力に寄与する。
【発明の効果】
【0011】
本願において開示される発明のうち代表的なものによって得られる効果を簡単に説明すれば下記のとおりである。
【0012】
すなわち、衝突予防機能を害することなく低消費電力に寄与することができる。
【図面の簡単な説明】
【0013】
【図1】図1は本発明に係る車両の衝突予防安全装置を適用した自動車を例示するブロック図である。
【図2】図2はステレオ画像認識部の一例を示すブロック図である。
【図3】図3は先行車の認識及び測距の処理を軽減する軽減制御の概略的なフローチャートである。
【図4】図4は図3のフローチャートに示される前方安全確認距離と自車の関係を示す説明図である。
【図5】図5は一般道路合流地点の様子として前方カメラでの監視領域外から他車が接近する例を示す説明図である。
【図6】図6は高速道路合流地点の様子として前方カメラでの監視領域外から他車が接近する例を示す説明図である。
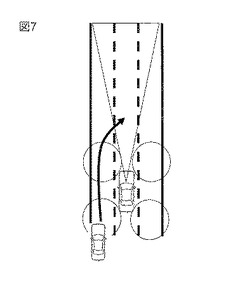
【図7】図7は道路の側方や後方の様子として前方カメラでの監視領域外から他車が接近する例を示す説明図である。
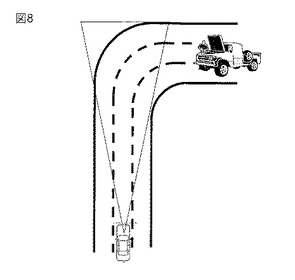
【図8】図8は道路のカーブの先の様子として前方カメラでの監視領域外から他車が接近する例を示す説明図である。
【発明を実施するための形態】
【0014】
1.実施の形態の概要
先ず、本願において開示される発明の代表的な実施の形態について概要を説明する。代表的な実施の形態についての概要説明で括弧を付して参照する図面中の参照符号はそれが付された構成要素の概念に含まれるものを例示するに過ぎない。
【0015】
〔1〕<安全条件を確認して先行環境認識部に先行車の認識動作を軽減させる>
本発明の代表的な実施の形態に係る車両の衝突予防安全装置は、自車前方の先行車を認識すると共に当該先行車との距離を測定する先行環境認識部(60,63)と、自車位置を測定する自車位置測定部(40,41)と、自車周囲に障害物が存在するか否かを判別する周囲障害物検出部(64,65)と、前記先行環境認識部による測定結果、前記自車位置測定部による測定結果及び前記周囲障害物検出部による検出結果に基づいて衝突回避の予防制御を行う予防制御部(62)と、を備える。前記予防制御部は、自車が高速道路上の合流地点以外を走行中である第1条件、周囲所定範囲に他車が存在しない第2条件、及び自車の前方に見通し可能な第1距離以上の道路があってその間に他車が存在しない第1安全確認距離(M2)以上の安全確認距離(L)が存在している第3条件が成立したとき、自車の前方の道路の安全確認距離に応じて前記先行環境認識部による先行車の認識及び測距の処理を軽減する軽減制御を行う。
【0016】
上記条件を満足することにより走行中の安全を確保でき、この状態を基点に安全を保証できる前方の安全確認距離の範囲で先行環境認識部による先行車の認識及び測距の処理を軽減することにより、衝突予防機能が害されることなく低消費電力に寄与する。
【0017】
〔2〕<先行車の認識及び測距の処理頻度を低減>
項2の車両の衝突予防安全装置において、前記予防制御部は前記軽減制御として、前記自車の前方の安全確認距離が第1安全確認距離(M2)以上で第2安全確認距離(M1)よりも短い場合には前記先行環境認識部に先行車の認識及び測距の処理頻度を低減する指示(I2)を与える。
【0018】
これにより、第1安全確認距離に対する安全確認距離が第2安全確認距離よりも短いという制限的な範囲では先行環境認識部による先行車の認識及び測距の処理頻度を低減するに留めて処理を軽減するから、頻度の低減の範囲で先行環境認識部による先行車の認識及び測距の処理は維持され、先行車に対する衝突予防機能がある程度維持した上で、処理頻度の低減という範囲で低消費電力を実現することができる。
【0019】
〔3〕<認識処理動作の一時停止>
項2の車両の衝突予防安全装置において、前記予防制御部は前記軽減制御として、前記自車の前方の安全確認距離が第2安全確認距離(M1)以上である場合には前記先行環境認識部に先行車の認識及び測距の処理を一時停止する指示(I3)を与え、そのときの自車の速度に応じて自車の前方の安全確認距離が前記第2安全確認距離になるまでの時間を予測し、その時間に基づいて前記停止指示を前記処理頻度低減の指示(I2)に変更する。
【0020】
これにより、第1安全確認距離に対する安全確認距離が第2安全確認距離よりも長いという安全度が増した範囲では先行環境認識部による先行車の認識及び測距の処理を一時停止するから、その間における先行環境認識部による電力消費を大きく低減することができる。一時停止期間中は先行環境認識部による先行車の認識及び測距の処理は全く維持されないので、車両の前進に応じてその安全度が低下する距離関係を予測し、それに基づいて一時停止の指示を頻度低下の指示に変更する処理を予め想定しておくことにより、先行車に対する衝突予防の安全性を保証した上で低消費電力を実現することができる。
【0021】
〔4〕<車速変更に応じた解除タイミングの変更>
項3の車両の衝突予防安全装置において、前記予防制御部は前記軽減制御において、一時停止する指示を与えたときの自車の速度に応じて自車の前方の安全確認距離が前記第2安全確認距離になるまでの時間を一旦予測した後に自車の速度が変化したときは、前記停止指示を前記処理頻度低減の指示に変更するまでの時間をその変化に応じて伸縮する。
【0022】
上記第3条件が成立したときの車速に従って予め見積もった時間を、その後の車速の変更に応じて伸縮するから、実際の車両走行状態に則って前記先行環境認識部による処理を再開することができ、先行車に対する衝突予防に高い安全性を有する。
【0023】
〔5〕<自車の速度が速いほど第1及び第2安全確認距離を大きくする>
項4の車両の衝突予防安全装置において、前記予防制御部は自車の速度が遅いときに比べて速いときには前記第1安全確認距離及び第2安全確認距離に大きな値を用いる。
【0024】
車速が早いほど第1安全確認距離及び第2安全確認距離の値を大きくすることにより衝突予防の安全性が増す。
【0025】
〔6〕<先行車の認識及び測距の処理頻度を低減のみ>
項1の車両の衝突予防安全装置において、前記予防制御部は前記軽減制御として、前記自車の前方の安全確認距離が前記第1安全確認距離(M2)以上の場合には前記先行環境認識部に先行車の認識及び測距の処理頻度を低減する指示を与える。
【0026】
軽減処理の全てを処理頻度の低減とすることによっても、衝突予防に高い安全性を維持しながら、低消費電力に寄与することができる。
【0027】
〔7〕<自車の速度が速いほど第1安全確認距離を大きくする>
項6の車両の衝突予防安全装置において、前記予防制御部は自車の速度が遅いときに比べて速いときには前記第1安全確認距離に大きな値を用いる。
【0028】
車速が早いほど第1安全確認距離の値を大きくすることにより衝突予防の安全性が増す。
【0029】
〔8〕<認識処理動作の一時停止のみ>
項1の車両の衝突予防安全装置において、前記予防制御部は前記軽減制御として、前記自車の前方の安全確認距離が第1安全確認距離(M1)以上である場合には前記先行環境認識部に先行車の認識及び測距の処理を一時停止する指示を与え、そのときの自車の速度に応じて自車の前方の距離が前記第1安全確認距離に減ずるまでの時間を予測し、その時間に基づいて前記停止指示を解除する。
【0030】
これにより、第1安全確認距離に対する安全距離の範囲で先行環境認識部による先行車の認識及び測距の処理を一時停止するから、その間における先行環境認識部による電力消費を大きく低減することができる。一時停止期間中は先行環境認識部による先行車の認識及び測距の処理は全く維持されないので、車両の前進に応じてその安全度が低下する距離関係を予測し、それに基づいて一時停止の指示を解除するまでの時間を予め想定しておくことにより、先行車に対する衝突予防の安全性を保証した上で低消費電力を実現することができる。項9の第1安全確認距離は項8の第1安全確認距離よりも長く設定されることになる。
【0031】
〔9〕<車速変更に応じた解除タイミングの変更>
項8の車両の衝突予防安全装置において、前記予防制御部は前記軽減制御において、一時停止する指示を与えたときの自車の速度に応じて自車の前方の安全確認距離が前記第1安全確認距離になるまでの時間を一旦予測した後に前記自車の速度が変化したときには、前記停止指示を解除するまでの時間をその速度変化に応じて伸縮する。
【0032】
上記3つの条件が成立したときの車速に従って予め見積もった時間を、その後の車速の変更に応じて伸縮するから、実際の車両走行状態に則って前記先行環境認識部による処理を再開することができるので、先行車に対する衝突予防に高い安全性を有する。
【0033】
〔10〕<自車の速度が速いほど第1安全確認距離を大きくする>
項9の車両の衝突予防安全装置において、前記予防制御部は自車の速度が遅いときに比べて速いときには前記第1安全確認距離に大きな値を用いる。
【0034】
車速が早いほど第1安全確認距離の値を大きくすることにより衝突予防の安全性が増す。
【0035】
〔11〕<地図情報と自車位置情報に基づく第1条件成立の判別>
項1の車両の衝突予防安全装置において、前記予防制御部は、前記自車位置測定部による自車位置の測定情報と地図情報とに基づいて前記第1条件が成立しているか否かを判別する。
【0036】
これにより、第1条件の成立を容易に判別する事ができる。
【0037】
〔12〕<地図情報、自車位置情報及び先行環境の認識結果に基づく第3条件成立の判別
項1の車両の衝突予防安全装置において、前記予防制御部は、自車位置測定部による自車位置の測定情報、自車位置に応ずる地図情報、及び先行環境認識部による認識結果に基づいて前記第3条件が成立しているか否かを判別する。
【0038】
これにより見通し可能な第1安全確認距離以上の道路の存在を容易に判別することができる。
【0039】
〔13〕<GPSで自車位置判別>
項12の車両の衝突予防安全装置において、前記予防制御部は自車位置情報として、GPSを用いて測位した情報を用いる。
【0040】
これにより、自動車位置情報を高い精度で容易に得ることができる。
【0041】
〔14〕<コーナーセンサの検出結果に基づく第2条件成立の判別>
項1の車両の衝突予防安全装置において、前記予防制御部は自車の前方及び後方の夫々のコーナーセンサ(64,65)による検出結果を用いて前記第2条件が成立するか否かを判別する。
【0042】
これにより、後方や側方などの死角からの他車の接近を容易に判別可能になる。
【0043】
〔15〕<ステレオカメラで先行車及び当該先行車までの距離を認識>
項1の車両の衝突予防安全装置において、前記先行環境認識部は、ステレオカメラ(63)による撮像データを用いて先行車の認識と当該先行車までの距離を測定する。
【0044】
これにより、先行車の認識と当該先行車までの測距を容易に行うことが可能になる。
【0045】
2.実施の形態の詳細
実施の形態について更に詳述する。
【0046】
《実施の形態1》
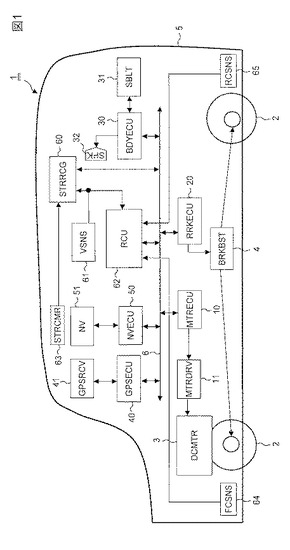
図1には本発明に係る車両の衝突予防安全装置を適用した自動車の概略が例示される。同図に示される自動車は特に制限されないが電気自動車である。
【0047】
同図には自動車1のパワートレイン系としてタイヤ2を回転駆動するDCモータ(DCMTR)3とブレーキブースタ(BRKBST)4が例示される。自動車のボディー5の内部はCAN(コントロール・エリア・ネットワーク)バス(CANBUS)10によって電子制御用のネットワークが構成され、CANバス10には代表的に示された複数の電子制御ユニット(ECU)10,20,30,40,50,60,62が接続される。衝突予防安全装置はここではCANバス10に接続された電子制御ユニット(ECU)10,20,30,40,50,60,62とそれらの制御対象回路などによって構成される。
【0048】
10で示されるモータ制御用の電子制御ユニット(MTRECU)はエンジン制御用のマイクロコンピュータを有し、CANバスインタフェース回路を介してCANバス6に接続され、アクセルペダルの操作量など応じたスロットル信号をモータドライバ(MTRDRV)11が受けてDCモータ3の回転数制御及びトルク制御を行う。
【0049】
20で示されるブレーキ制御用の電子制御ユニット(BRKECU)はブレーキ制御用のマイクロコンピュータを有し、CANバストランシーバを介してCANバス6に接続され、ブレーキペダルの操作量などに応じたブレーキ信号に従ってブレーキブースタ4の油圧制御を行う。
【0050】
30で示されるボディー系の電子制御ユニット(BDYECU)はボディー系制御用のマイクロコンピュータを有し、CANバストランシーバを介してCANバス6に接続され、CANバス6からの制御信号に従ってシートベルト(SBLT)31にテンションを加えたり、スピーカ32から警告や音声案内を発する制御を行う。
【0051】
40で示されるGPS((Global Positioning System)用の電子制御ユニット(GPSECU)はGPSレシーバ(GPSRCV)41を制御するマイクロコンピュータを有し、CANバストランシーバを介してCANバス6に接続され、測位動作の指示信号に応答してGPSレシーバ41による測位情報の受信動作を制御する。GPS用の電子制御ユニット40及びGPSレシーバ41は自車位置を測定する自車位置測定部の一例を構成する。
【0052】
50で示されるナビゲーション用の電子制御ユニット(NVECU)はナビゲーション装置(NV)51を制御するマイクロコンピュータを有し、CANバスインタフェース回路を介してCANバス6に接続され、ナビゲーション動作の指示信号に応答して地図情報を検索してディスプレイに表示し、或いはその指示に応答して地図情報をCANバス6に返す動作を制御する。ナビゲーション用の電子制御ユニット50及びナビゲーション装置51は要求に従った地図情報を提供する装置の一例である。
【0053】
60で示されるステレオ画像認識部(STRRCG)はステレオカメラ(STRCMR)63を制御するマイクロコンピュータを有し、CANバストランシーバを介してCANバス6に接続され、画像認識の制御信号に応答してステレオカメラ(STRCMR)63で自車の前方に対する撮像制御を行う。そして、ステレオカメラ(STRCMR)63で撮像された撮像データ(ステレオ撮像データ)を入力し、この撮像データに対する画像認識処理を行って自車の前方の先行車などを認識すると共に当該先行車などとの距離を測定して自車の先行環境を認識する。
【0054】
62で示される電子制御ユニット(RCU)は自動車1全体の走行制御を行う走行制御ユニットとしての意義を備えるとともに、衝突回避の予防制御を行う。この電子制御ユニット62を以下単に衝突回避予防制御部62とも称する。この衝突回避予防制御部62は、衝突回避の予防制御を行うマイクロコンピュータを有し、CABバストランシーバを介してCANバス6に接続されると共に、ステレオ画像認識部60、速度センサ(VSNS)61、自動車の前側のコーナーセンサ(FCSNS)64及び自動車の後ろ側のコーナーセンサ(RCSNS)65に接続され、衝突回避の安全予防制御を行うと共に電力消費の大きなステレオ画像認識動作に対する動作の軽減制御を行う。コーナーセンサ64,65は自車周囲に障害物が存在するか否かを判別する周囲障害物検出部の一例を成す。
【0055】
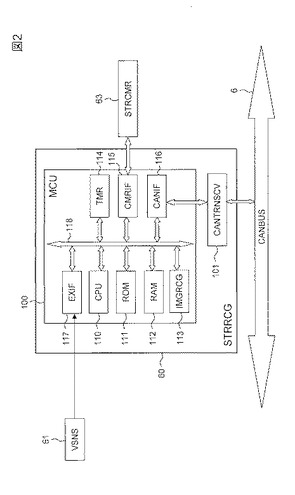
図2にはステレオ画像認識部60の構成が例示される。ステレオ画像認識部60はマイクロコンピュータ(MCU)100と、このマイクロコンピュー100をCANバス6に接続するCANバストランシーバ(CANTRNSCV)101とを有する。マイクロコンピュータ100は、特に制限されないが、単結晶シリコンのような1個の半導体基板にCMOS集積回路製造技術などによって形成される。マイクロコンピュータ100は、所定の、命令セットを用いたプログラムを実行する中央処理装置(CPU)110、CPU110が実行するプログラムやデータを保持する電気的に書き換え可能な不揮発性メモリ(ROM)111、CXPU110のワーク領域若しくはデータバッファ領域とされるランダムアクセスメモリ(RAM)112、画像認識処理部(IMGRCG)113を備える。更に、タイマ(TMR)114、前記ステレオカメラ63に接続されるカメラインタフェース(CMRIF)115、CANバストランシーバ101に接続されるCANインタフェース(CANIF)116、及び速度センサ61などの出力を受けるその他の外部インタフェース回路(EXIF)117を備える。マイクロコンピュータ100の上記夫々の内部回路は内部バス118を介して相互にアドレスやデータの入出力を行う。
【0056】
ステレオ撮像データを用いた画像認識処理部(IMGRCG)113による画像認識処理について説明する。
【0057】
ステレオカメラ63は、ステレオ光学系として例えば電荷結合素子(CCD)等の個体撮像素子を用いた左右1組のCCDカメラで構成されている。これら1組のCCDカメラは、それぞれ車室内の天井前方に一定の間隔をもって取り付けられ、車外の対象を異なる視点からステレオ撮像し、撮像した画像情報をステレオ画像認識部60に出力する。ステレオ画像認識部60には、ステレオカメラ63から画像情報が入力されるとともに車速センサ61から自車速V等が入力される。このステレオ画像認識部62は、ステレオカメラ63からの画像情報に基づいて自車1の前方の立体物データや白線データ等の前方情報を認識し、これら認識情報等に基づいて自車走行路を推定する。さらに、ステレオ画像認識部60は、認識した立体物データ等に基づいて自車走行路上の先行車の検出を行う。
【0058】
ここで、ステレオ画像認識部60は、ステレオカメラ63から画像情報の処理を、例えば以下のように行う。先ず、ステレオカメラ63で自車進行方向を撮像した1組のステレオ画像対に対し、対応する位置のずれ量から三角測量の原理によって距離情報を生成する。そして、この距離情報に対して周知のグルーピング処理を行い、グルーピング処理した距離情報を予め記憶しておいた三次元的な道路形状データや立体物データ等と比較することにより、白線データ、道路に沿って存在するガードレール、縁石等の側壁データ、車両等の立体物データ等を抽出する。さらに、ステレオ画像認識装置60は、白線データや側壁データ等に基づいて自車走行路を推定し、自車走行路上に存在する立体物であって、自車両1と略同じ方向に所定の速度(例えば、0Km/h以上)で移動するものを先行車として抽出(検出)する。そして、先行車を検出した場合には、その先行車情報として、先行車距離d(=車間距離)、先行車速Vf(=(車間距離dの変化の割合)+(自車速V))、先行車減速度af(=先行車速Vfの微分値)等を演算する。例えば先行車距離はd=Bf/Zによって演算する。Bはステレオカメラ63の左右カメラ間の基線長、fはステレオカメラ63の焦点距離、Zは視差である。
【0059】
尚、先行車の中で、特に、速度Vfが所定値以下(例えば、4Km/h以下)で、且つ、加速していないものは、略停止状態の先行車として認識される。ステレオ画像認識部60は、ステレオカメラ63とともに、先行車認識手段としての機能を実現する。
【0060】
図1で説明した衝突回避予防制御部62による衝突回避の安全予防制御について説明する。
【0061】
衝突回避予防制御部62にはステレオ画像認識部4及び車速センサ61が接続されると共に図示を省略するクルーズコントロールスイッチ等が接続されている。クルーズコントロールスイッチは、例えば、定速走行時の目標車速を設定する車速セットスイッチ、主に目標車速を下降側へ設定変更するコーストスイッチ、主に目標車速を上昇側へ設定変更するリジュームスイッチ等の複数のスイッチ類がステアリングコラムの側部等に設けられた定速走行操作レバーに連結されて構成されている。さらに、この定速走行操作レバーの近傍には、ACC制御(定速走行制御及び追従走行制御)のON/OFFを行う図示を省略するメインスイッチが配設されている。
【0062】
ドライバにより図示しないメインスイッチがONされ、定速走行操作レバーを通じてドライバの希望する車速がセットされると、衝突回避予防制御部62は、自車速がドライバのセットした目標車速に収束するよう、エンジン制御ユニット10及びブレーキ制御ユニット20を通じた車速制御を行う。すなわち、衝突回避予防制御部62は、エンジン制御ユニット10を通じてモータドライバ11の出力電圧制御(モータ3のの回転数制御)を行うことにより、自車速を目標車速に収束させる。さらに、衝突回避予防制御部62は、モータ3の回転数制御のみでは十分な減速度が得られないと判断した場合に、ブレーキ制御ユニット20を通じてブレーキブースタ4からの油圧制御(ブレーキの自動介入制御)を行うことにより、自車速を目標車速に収束させる。これによって定速走行制御が行われる。
【0063】
定速走行制御を行っているとき、ステレオ画像認識部60にて先行車を認識した場合、衝突回避予防制御部62は、定速走行制御から追従走行制御へと移行し、モータの回転制御とブレーキの自動介入制御を行うことによって車間距離を所定値に保とうとする。先行車の急ブレーキなどによってその車間を保てなくなったとき衝突回避予防制御部62は、ブレーキ制御ユニット20による緊急制動を行うと共に、ボディー系の電子制御ユニット30を介してシートベルト(SBLT)31にテンションを加え、スピーカ32から警告や音声案内を発する制御を行う。
【0064】
特に制限されないが、ACC制御のメインスイッチがOFFにされた一般走行においても衝突回避予防制御部62は、上記追従制御と同様に、先行車の急ブレーキなどによってその車間距離が規定以下になったとき、ブレーキ制御ユニット20による緊急制動を行うと共に、ボディー系の電子制御ユニット30を介してシートベルト(SBLT)31にテンションを加え、スピーカ32から警告や音声案内を発する制御を行う。また、衝突回避予防制御部62は、走行中に自車の側方や後方に接近した他車の存在をコーナーセンサ64,65の出力に基づいて検出したときは、ボディー系の電子制御ユニット30を介してスピーカ32から他車接近の警告や音声案内を発する制御を行う。
【0065】
次に、図1で説明した衝突回避予防制御部62によるステレオ画像認識動作の軽減制御について図3に基づいて説明する。上述の定速走行制御及び追従走行制御さらには一般走行時の衝突回避の安全予防制御の内容から明らかなように、衝突回避の安全予防制御が行われているときステレオ画像認識部60はステレオカメラ63からの撮像データを逐次入力して先行車の認識や先行車までの距離の測定などを行い(S1)、その結果などを用いて衝突回避の安全予防処理が行なわれる(S2)。このとき、以下の第1乃至第3条件を満足することにより、衝突回避予防制御部62は、自車の前方の安全確認距離に応じてステレオ画像認識部60による先行車の認識及び測距の処理を軽減する処理を行なう。この軽減処理にはステレオカメラ63による撮像動作を軽減する処理を付随させても良い。
【0066】
軽減処理を行なうときの上記条件は、自車が高速道路上の合流地点以外を走行中である第1条件、周囲所定範囲に他車が存在しない第2条件、及び自車の前方に見通し可能な第1距離以上の道路があってその間に他車が存在しない第1安全距離以上の安全距離が存在する第3件条が成立することである。
【0067】
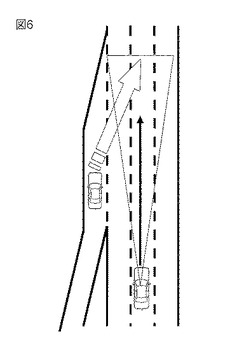
前記第1条件が成立しているか否かは衝突回避制御部62が自車位置の測位情報と地図情報とに基づいて判別する(S3)。測位情報は、例えばGPSレシーバ41で受信したGPS信号に基づいてGPS用の電子制御部40が取得して衝突回避制御部62に出力する。地図情報は、衝突回避制御部62から与えられる測位情報に基づいてナビゲーション用の電子制御装置50がナビゲーション部51から検索して出力する。一般道路は図5に例示されるように交差点及び歩行者、二輪車が死角から出てくることが多いので予防安全制御を軽減する対象から除外している。高速道路のインターチェンジ(IC)、パーキングエリア(PA)及びサービスエリア(SA)に代表される合流地点は図6に例示されるようにステレオカメラ63による前方の監視領域外から他車が急に接近する場合が想定されるから予防安全制御を軽減する対象から除外している。
【0068】
第2条件が成立しているか否かは衝突回避制御部62がコーナーセンサ64,65による検出結果に基づいて判別する(S4)。例えば図7に例示されるように後方や側方に他車がいる場合でも、追い抜かれた後に危険が発生する可能性があるので周囲から他車が接近している状態がコーナーセンサ64,65で検出された状態があれば予防安全制御を軽減する対象から除外する。
【0069】
第3の条件が成立しているか否かは衝突回避制御部62が、GPSレシーバ41からGPS用の電子制御部40を通じて得られる自車位置の測位情報、自車位置の測位情報に基づいてナビゲーション部51で検索された地図情報、及びステレオ画像認識部60の画像認識処理で得られた先行他車の存否並びに先行他車までの距離に基づいて判別する(S5)。第3条件において自車の前方に見通し可能な第1距離以上の道路があることを条件にしたのは、単に前方に第1距離以上の道路があることしか条件にしない場合には図8に例示されるように途中で屈曲された道路の先のように見通し不能な部分に他の自動車があっても認識し難いからである。すなわち、道路上で、カーブ等の先が見通せない場所があった場合その先で障害物が急に出現する事も考えられるからである。見通し可能な道路であるか否かは、例えば、ステレオカメラ63で白線を認識した上で、形状、または消失点の位置で前方にどれだけの距離の道路があるかによって判別することができる。
【0070】
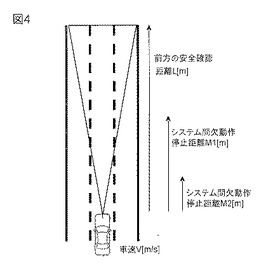
第3条件が成立するかの判別処理において、安全確認距離Lの判別では、それが(1)L<M2、(2)M2≦L<M1、(3)M1≦Lの何れになるかの判別が行なわれる。安全確認距離Lとは、自車の前方に見通し可能な道路があってその間に他車が存在しないと判別された距離である。見通し可能な道路があるか否かは自車の測位情報と地図情報から判別され、他車が存在しないか否かはステレオ画像認識部60の画像認識処理結果に基づいて判別される。自車位置、認識された安全確認距離L、第1安全確認距離M2、及び第2安全確認距離M1の相対位置関係は図4に例示される通りである。
【0071】
衝突回避制御部62は、ステレオ画像認識部60の画像認識結果から確認された安全確認距離LがL<M2の関係を持つとき、ステレオ画像認識部60に対して処理の軽減は通知せず、基準の頻度でステレオ画像データに対する画像認識を行なう指示I1を与える(S6)。それによってステレオ画像認識部60は例えば毎秒30枚の画像を処理する。
【0072】
また、衝突回避制御部62は、ステレオ画像認識部60の画像認識結果から確認された安全確認距離LがM2≦L<M1の関係を持つとき、ステレオ画像認識部60に対して処理を軽減する通知として、先行車の認識及び測距のための画像認識処理の頻度を低減する指示I2を与える(S7)。それによってステレオ画像認識部60は例えば毎秒8枚の画像を処理する。
【0073】
一方、衝突回避制御部62は、ステレオ画像認識部60の画像認識結果から確認された安全確認距離LがM1≦Lの関係を持つとき、ステレオ画像認識部60に対して先行車の認識及び測距のための画像認識処理を一時停止する指示(I3)を与えると共に、そのときの自車の速度に応じて自車の前方の安全確認距離Lが前記第2安全確認距離M1になるまでの時間を予測し、その予測時間の経過を待って前記停止指示I3をネゲートし且つそれに代えて前記画像認識処理頻度の低減指示I2をアサートする(S8)。安全確認距離Lが前記第2安全確認距離M1になるまでの時間を一旦予測した後に、自車1の速度が変化したときは、当該予測時間をその速度変化に応じて伸縮する。
【0074】
上記実施の形態1によれば以下の作用効果を奏する。
(1)上記第1乃至第3条件を満足することにより走行中の安全を確保でき、この状態を基点に安全を保証できる前方の安全確認距離の範囲でステレオ画像認識部60による先行車の認識及び測距の画像認識処理を軽減することにより、衝突予防機能が害されることなく衝突予防安全装置の低消費電力に寄与する。
(2)第1安全確認距離M2に対する安全確認距離Lが第2安全確認距離M2よりも短いという制限的な範囲ではステレオ画像認識部60による先行車の認識及び測距の画像認識処理頻度を低減するに留めて処理を軽減するから、頻度の低減の範囲でステレオ画像認識部60による先行車の認識及び測距の処理は維持され、先行車に対する衝突予防機能がある程度維持した上で、処理頻度の低減という範囲でステレオ画像認識部60の電力低消を低減させることができる。画像認識処理の頻度を低減するとき、それに合わせてステレオカメラ63の撮像動作についてもその頻度を低くすることにより一層の低消費電力が期待される。
(3)第1安全確認距離M2に対する安全確認距離Lが第2安全確認距離M1よりも長いという安全度が増した範囲ではステレオ画像認識部60による先行車の認識及び測距の画像認識処理を一時停止するから、その間におけるステレオ画像認識部60による電力消費を大きく低減することができる。一時停止期間中はステレオ画像認識部60による先行車の認識及び測距の画像認識処理は全く維持されないので、車両の前進に応じてその安全度が低下する距離関係を予測し、それに基づいて一時停止の指示を頻度低下の指示に変更する処理を予め想定しておくことにより、先行車に対する衝突予防の安全性を保証した上で低消費電力を実現することができる。画像認識処理を一時停止するとき、その停止期間に合わせてステレオカメラ63の撮像動作も停止することにより一層の低消費電力が期待される。
(4)上記第3条件が成立したときの車速に従って予め見積った時間を、その後の車速の変更に応じて伸縮するから、実際の車両走行状態に則って前記ステレオ画像認識部60による処理を再開することができ、先行車に対する衝突予防に高い安全性を有する。
【0075】
また衝突回避予防制御部62が軽減処理を行っている場合、高速道路上の分岐地点または合流地点、屈曲部等の見通し不能地点が所定距離内に接近をした場合、および第1距離を走行完了した場合にナビゲーション用の電子制御装置50による通知信号、コーナーセンサ64,65による自車後方または側方に接近する他車の検知信号、のいずれかが発行された場合は、衝突予防制御部62は軽減処理を終了し通常処理状態に移行する。
【0076】
《実施の形態2》
実施の形態1では第1安全確認距離M1及び第2安全確認距離M1を予め設定した値とし、上記第3条件の成立を判別したときの自車1の速度との関係について言及していない。実施の形態2の衝突予防安全装置では、衝突回避制御部は自車の速度が遅いときに比べて速いときには前記第1安全確認距離M2及び第2安全確認距離M1に大きな値を用いるものとする点が、第1の実施の形態と相違する。その他の構成については実施の形態1と同じであるからその詳細な説明は省略する。
【0077】
この実施の形態2のように車速が早いほど第1安全確認距離M2及び第2安全確認距離M1の値を大きくすることにより衝突予防の安全性が増す。
【0078】
《実施の形態3》
実施の形態1では、安全確認距離Lの判別において、M2≦L<M1の場合には画像認識処理の頻度を低下させ、M1≦Lの場合には画像認識処理を一時停止とした。特に図示はしないが、実施の形態2の車両の衝突予防安全装置は、衝突回避制御部62による前記軽減制御として、前記自車の前方の安全確認距離Lが前記第1安全確認距離M2以上の場合(M2≦L)にはステレオ画像認識部60に先行車の認識及び測距の画像認識処理頻度を低減する指示を与えるものとし、M2≦L<M1及びM1≦Lの判別とそれぞれに対応する処理を行なわないものとする点が実施の形態1と相違される。その他の構成については実施の形態1と同じであるからその詳細な説明は省略する。
【0079】
この実施の形態3のように軽減処理の全てを処理頻度の低減とすることによっても、衝突予防に高い安全性を維持しながら、低消費電力に寄与することができる。
【0080】
尚、実施の形態3においても、前記衝突回避制御部は自車の速度が遅いときに比べて速いときには前記第1安全確認距離M2に大きな値を用いるように構成することも可能である。
【0081】
《実施の形態4》
実施の形態1では、安全確認距離Lの判別において、M2≦L<M1の場合には画像認識処理の頻度を低下させ、M1≦Lの場合には画像認識処理を一時停止とした。特に図示はしないが、実施の形態4の車両の衝突予防安全装置は、衝突回避制御部62による前記軽減制御として、前記自車の前方の安全確認距離が第1安全確認距離M1以上である場合には前記ステレオ画像認識部60に先行車の認識及び測距の画像認識処理を一時停止する指示を与え、そのときの自車の速度に応じて自車の前方の距離が前記第1安全確認距離M1に減ずるまでの時間を予測し、その時間に基づいて前記停止指示を解除するものとする点が実施の形態1と相違される。その他の構成については実施の形態1と同じであるからその詳細な説明は省略する。
【0082】
これにより、第1安全確認距離M1に対する安全距離の範囲でステレオ画像認識部60による先行車の認識及び測距の画像認識処理を一時停止するから、その間におけるステレオ画像認識部60による電力消費を大きく低減することができる。一時停止期間中はステレオ画像認識部60による先行車の認識及び測距の処理は全く維持されないので、車両の前進に応じてその安全度が低下する距離関係を予測し、それに基づいて一時停止の指示を解除するまでの時間を予め想定しておくことにより、先行車に対する衝突予防の安全性を保証した上で低消費電力を実現することができる。ここでこの実施の形態4の第1安全確認距離M1は実施の形態3の第1安全確認距離M2よりも長く設定されることになる。
【0083】
安全確認距離Lが前記第1安全確認距離M1になるまでの時間を一旦予測した後に、自車の速度が変化したときは、前記停止指示を解除するまでの時間をその速度変化に応じて伸縮する処理を採用可能である。
【0084】
この実施の形態4のように軽減処理の全てを画像認識処理の一時停止とすることによっても、衝突予防に高い安全性を維持しながら、低消費電力に寄与することができる。
【0085】
尚、実施の形態4においても、前記衝突回避制御部は自車の速度が遅いときに比べて速いときには前記第1安全確認距離M1に大きな値を用いるように構成することも可能である。
【0086】
以上本発明者によってなされた発明を実施形態に基づいて具体的に説明したが、本発明はそれに限定されるものではなく、その要旨を逸脱しない範囲において種々変更可能であることは言うまでもない。
【0087】
例えば、画像認識の頻度は毎秒の画面数で規定することに限定されず、速度に応じて毎秒10乃至30程度の画面に対する画像認識を数秒間毎に間歇的に行なったりするようにしてもよい。頻度を低減するときはその間にステレオカメラの撮像動作も停止してよい。また、画像認識は全て画像認識処理部113で行なうことに限定されず、一部をCPU110が負担し、或いはCPU110とその動作プログラムで行うようにしてもよい。前記第1安全確認距離及び第2安全確認距離は車両の種類や馬力などに応じて適宜決定すればよい。本発明に係る衝突予防安全装置は自動車に限らずバイクやその他の車両に広く適用することができる。
【符号の説明】
【0088】
1 自動車
3 DCモータ(DCMTR)
4 ブレーキブースタ(BRKBST)
10 モータ制御用の電子制御ユニット(MTRECU)
20 ブレーキ制御用の電子制御ユニット(BRKECU)
30 ボディー系の電子制御ユニット(BDYECU)
40 GPS用の電子制御ユニット(GPSECU)
50 ナビゲーション用の電子制御ユニット(NVECU)
60 ステレオ画像認識部(STRRCG)
63 ステレオカメラ(STRCMR)
62 走行制御ユニット(衝突回避予防制御部)
61 速度センサ(VSNS)
64 自動車の前側のコーナーセンサ(FCSNS)
65 自動車の後ろ側のコーナーセンサ(RCSNS)
100 マイクロコンピュータ(MCU)
101 CANバストランシーバ(CANTRNSCV)
110 中央処理装置(CPU)
113 画像認識処理部(IMGRCG)
【技術分野】
【0001】
本発明は、車両の衝突予防安全装置に関し、特に電気自動車における先行車の認識と測距の処理に適用して有効な技術に関する。
【背景技術】
【0002】
車両の衝突予防を行う技術として、搭載したカメラやレーザレーダ装置等により前方の走行環境を検出し、この走行環境データから障害物や先行車を認識して、自車両の目標減速度を設定することで、障害物や先行車に対して車間距離を一定に保ちながら走行(追従走行制御)する走行制御技術が数多く提案されている。例えば特許文献1には、車間距離が最終目標距離以下となったときのブレーキ制御用の目標減速度を、最終目標距離に対して車間距離が占める割合に応じて可変設定することにより、先行車に対するプリクラッシュ制御を前提としたブレーキの自動介入制御時においても、過剰な減速度による減速を防止して、先行車との関係に応じ、ドライバのフィーリングに合った適切な減速度で減速制御を行うことができるようにする技術が記載される。ここでは、前方の走行環境を検出するためにステレオカメラによる撮像データの画像処理を行って、自車走行路を推定したり自車走行路上の先行車を検出したりすることが記載される。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2009−149167号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
車両の衝突予防安全装置における前方の走行環境を検出する動作は、ステレオカメラよりステレオ画像認識装置に車両前方の画像が送られ、ステレオ画像認識装置がその画像を解析して先行車両との距離を計算する。計算された距離などに基づいて危険が迫っていると判断されたときはエンジンやブレーキの電子制御装置(ECU)に命令を出して危険を回避するようにドライバーに指示し、或いはその衝突を回避するような制御、衝突した時の被害を軽減させる装置を作動させるなどの衝突予防安全処理が行われる。
【0005】
画像認識により前方を監視する場合には、車速を考慮して通常は1秒間に10枚〜30枚の画像をステレオカメラからステレオ画像認識装置に送り、画像認識を繰り返し行っている。画像認識処理は非常に計算量が多く、そのためステレオ画像認識装置及びカメラの消費電力が大きくなる。特に内燃機関エンジン自動車やハイブリッド自動車に比べて電気自動車の場合には走行駆動系以外で使用できる電力に大きな制限を受けることが予想されるので、車両の衝突予防安全装置についても低消費電力が必要であることが本発明者によって見出された。
【0006】
本発明の目的は、衝突予防機能を害することなく低消費電力に寄与することができる車両の衝突予防安全装置を提供することにある。
【0007】
本発明の前記並びにその他の目的と新規な特徴は本明細書の記述及び添付図面から明らかになるであろう。
【課題を解決するための手段】
【0008】
本願において開示される発明のうち代表的なものの概要を簡単に説明すれば下記の通りである。
【0009】
すなわち、自車前方の先行車を認識すると共に当該先行車との距離を測定する先行環境認識部による認識結果などを用いて車両の衝突予防安全処理を行う衝突予防安全装置において、自車が高速道路上の合流地点以外を走行中であり、周囲所定範囲に他車が存在せず、自車の前方に見通し可能な第1距離以上の道路があってその間に他車が存在しない所定の安全確認距離が存在しているという条件を満足するとき、自車の前方の安全確認距離に応じて先行環境認識部による先行車の認識及び測距の処理を軽減する制御を行う。
【0010】
上記条件を満足することにより走行中の安全を確保でき、この状態を基点に安全を保証できる前方の安全確認距離の範囲で先行環境認識部による先行車の認識及び測距の処理を軽減することにより、衝突予防機能が害されることなく低消費電力に寄与する。
【発明の効果】
【0011】
本願において開示される発明のうち代表的なものによって得られる効果を簡単に説明すれば下記のとおりである。
【0012】
すなわち、衝突予防機能を害することなく低消費電力に寄与することができる。
【図面の簡単な説明】
【0013】
【図1】図1は本発明に係る車両の衝突予防安全装置を適用した自動車を例示するブロック図である。
【図2】図2はステレオ画像認識部の一例を示すブロック図である。
【図3】図3は先行車の認識及び測距の処理を軽減する軽減制御の概略的なフローチャートである。
【図4】図4は図3のフローチャートに示される前方安全確認距離と自車の関係を示す説明図である。
【図5】図5は一般道路合流地点の様子として前方カメラでの監視領域外から他車が接近する例を示す説明図である。
【図6】図6は高速道路合流地点の様子として前方カメラでの監視領域外から他車が接近する例を示す説明図である。
【図7】図7は道路の側方や後方の様子として前方カメラでの監視領域外から他車が接近する例を示す説明図である。
【図8】図8は道路のカーブの先の様子として前方カメラでの監視領域外から他車が接近する例を示す説明図である。
【発明を実施するための形態】
【0014】
1.実施の形態の概要
先ず、本願において開示される発明の代表的な実施の形態について概要を説明する。代表的な実施の形態についての概要説明で括弧を付して参照する図面中の参照符号はそれが付された構成要素の概念に含まれるものを例示するに過ぎない。
【0015】
〔1〕<安全条件を確認して先行環境認識部に先行車の認識動作を軽減させる>
本発明の代表的な実施の形態に係る車両の衝突予防安全装置は、自車前方の先行車を認識すると共に当該先行車との距離を測定する先行環境認識部(60,63)と、自車位置を測定する自車位置測定部(40,41)と、自車周囲に障害物が存在するか否かを判別する周囲障害物検出部(64,65)と、前記先行環境認識部による測定結果、前記自車位置測定部による測定結果及び前記周囲障害物検出部による検出結果に基づいて衝突回避の予防制御を行う予防制御部(62)と、を備える。前記予防制御部は、自車が高速道路上の合流地点以外を走行中である第1条件、周囲所定範囲に他車が存在しない第2条件、及び自車の前方に見通し可能な第1距離以上の道路があってその間に他車が存在しない第1安全確認距離(M2)以上の安全確認距離(L)が存在している第3条件が成立したとき、自車の前方の道路の安全確認距離に応じて前記先行環境認識部による先行車の認識及び測距の処理を軽減する軽減制御を行う。
【0016】
上記条件を満足することにより走行中の安全を確保でき、この状態を基点に安全を保証できる前方の安全確認距離の範囲で先行環境認識部による先行車の認識及び測距の処理を軽減することにより、衝突予防機能が害されることなく低消費電力に寄与する。
【0017】
〔2〕<先行車の認識及び測距の処理頻度を低減>
項2の車両の衝突予防安全装置において、前記予防制御部は前記軽減制御として、前記自車の前方の安全確認距離が第1安全確認距離(M2)以上で第2安全確認距離(M1)よりも短い場合には前記先行環境認識部に先行車の認識及び測距の処理頻度を低減する指示(I2)を与える。
【0018】
これにより、第1安全確認距離に対する安全確認距離が第2安全確認距離よりも短いという制限的な範囲では先行環境認識部による先行車の認識及び測距の処理頻度を低減するに留めて処理を軽減するから、頻度の低減の範囲で先行環境認識部による先行車の認識及び測距の処理は維持され、先行車に対する衝突予防機能がある程度維持した上で、処理頻度の低減という範囲で低消費電力を実現することができる。
【0019】
〔3〕<認識処理動作の一時停止>
項2の車両の衝突予防安全装置において、前記予防制御部は前記軽減制御として、前記自車の前方の安全確認距離が第2安全確認距離(M1)以上である場合には前記先行環境認識部に先行車の認識及び測距の処理を一時停止する指示(I3)を与え、そのときの自車の速度に応じて自車の前方の安全確認距離が前記第2安全確認距離になるまでの時間を予測し、その時間に基づいて前記停止指示を前記処理頻度低減の指示(I2)に変更する。
【0020】
これにより、第1安全確認距離に対する安全確認距離が第2安全確認距離よりも長いという安全度が増した範囲では先行環境認識部による先行車の認識及び測距の処理を一時停止するから、その間における先行環境認識部による電力消費を大きく低減することができる。一時停止期間中は先行環境認識部による先行車の認識及び測距の処理は全く維持されないので、車両の前進に応じてその安全度が低下する距離関係を予測し、それに基づいて一時停止の指示を頻度低下の指示に変更する処理を予め想定しておくことにより、先行車に対する衝突予防の安全性を保証した上で低消費電力を実現することができる。
【0021】
〔4〕<車速変更に応じた解除タイミングの変更>
項3の車両の衝突予防安全装置において、前記予防制御部は前記軽減制御において、一時停止する指示を与えたときの自車の速度に応じて自車の前方の安全確認距離が前記第2安全確認距離になるまでの時間を一旦予測した後に自車の速度が変化したときは、前記停止指示を前記処理頻度低減の指示に変更するまでの時間をその変化に応じて伸縮する。
【0022】
上記第3条件が成立したときの車速に従って予め見積もった時間を、その後の車速の変更に応じて伸縮するから、実際の車両走行状態に則って前記先行環境認識部による処理を再開することができ、先行車に対する衝突予防に高い安全性を有する。
【0023】
〔5〕<自車の速度が速いほど第1及び第2安全確認距離を大きくする>
項4の車両の衝突予防安全装置において、前記予防制御部は自車の速度が遅いときに比べて速いときには前記第1安全確認距離及び第2安全確認距離に大きな値を用いる。
【0024】
車速が早いほど第1安全確認距離及び第2安全確認距離の値を大きくすることにより衝突予防の安全性が増す。
【0025】
〔6〕<先行車の認識及び測距の処理頻度を低減のみ>
項1の車両の衝突予防安全装置において、前記予防制御部は前記軽減制御として、前記自車の前方の安全確認距離が前記第1安全確認距離(M2)以上の場合には前記先行環境認識部に先行車の認識及び測距の処理頻度を低減する指示を与える。
【0026】
軽減処理の全てを処理頻度の低減とすることによっても、衝突予防に高い安全性を維持しながら、低消費電力に寄与することができる。
【0027】
〔7〕<自車の速度が速いほど第1安全確認距離を大きくする>
項6の車両の衝突予防安全装置において、前記予防制御部は自車の速度が遅いときに比べて速いときには前記第1安全確認距離に大きな値を用いる。
【0028】
車速が早いほど第1安全確認距離の値を大きくすることにより衝突予防の安全性が増す。
【0029】
〔8〕<認識処理動作の一時停止のみ>
項1の車両の衝突予防安全装置において、前記予防制御部は前記軽減制御として、前記自車の前方の安全確認距離が第1安全確認距離(M1)以上である場合には前記先行環境認識部に先行車の認識及び測距の処理を一時停止する指示を与え、そのときの自車の速度に応じて自車の前方の距離が前記第1安全確認距離に減ずるまでの時間を予測し、その時間に基づいて前記停止指示を解除する。
【0030】
これにより、第1安全確認距離に対する安全距離の範囲で先行環境認識部による先行車の認識及び測距の処理を一時停止するから、その間における先行環境認識部による電力消費を大きく低減することができる。一時停止期間中は先行環境認識部による先行車の認識及び測距の処理は全く維持されないので、車両の前進に応じてその安全度が低下する距離関係を予測し、それに基づいて一時停止の指示を解除するまでの時間を予め想定しておくことにより、先行車に対する衝突予防の安全性を保証した上で低消費電力を実現することができる。項9の第1安全確認距離は項8の第1安全確認距離よりも長く設定されることになる。
【0031】
〔9〕<車速変更に応じた解除タイミングの変更>
項8の車両の衝突予防安全装置において、前記予防制御部は前記軽減制御において、一時停止する指示を与えたときの自車の速度に応じて自車の前方の安全確認距離が前記第1安全確認距離になるまでの時間を一旦予測した後に前記自車の速度が変化したときには、前記停止指示を解除するまでの時間をその速度変化に応じて伸縮する。
【0032】
上記3つの条件が成立したときの車速に従って予め見積もった時間を、その後の車速の変更に応じて伸縮するから、実際の車両走行状態に則って前記先行環境認識部による処理を再開することができるので、先行車に対する衝突予防に高い安全性を有する。
【0033】
〔10〕<自車の速度が速いほど第1安全確認距離を大きくする>
項9の車両の衝突予防安全装置において、前記予防制御部は自車の速度が遅いときに比べて速いときには前記第1安全確認距離に大きな値を用いる。
【0034】
車速が早いほど第1安全確認距離の値を大きくすることにより衝突予防の安全性が増す。
【0035】
〔11〕<地図情報と自車位置情報に基づく第1条件成立の判別>
項1の車両の衝突予防安全装置において、前記予防制御部は、前記自車位置測定部による自車位置の測定情報と地図情報とに基づいて前記第1条件が成立しているか否かを判別する。
【0036】
これにより、第1条件の成立を容易に判別する事ができる。
【0037】
〔12〕<地図情報、自車位置情報及び先行環境の認識結果に基づく第3条件成立の判別
項1の車両の衝突予防安全装置において、前記予防制御部は、自車位置測定部による自車位置の測定情報、自車位置に応ずる地図情報、及び先行環境認識部による認識結果に基づいて前記第3条件が成立しているか否かを判別する。
【0038】
これにより見通し可能な第1安全確認距離以上の道路の存在を容易に判別することができる。
【0039】
〔13〕<GPSで自車位置判別>
項12の車両の衝突予防安全装置において、前記予防制御部は自車位置情報として、GPSを用いて測位した情報を用いる。
【0040】
これにより、自動車位置情報を高い精度で容易に得ることができる。
【0041】
〔14〕<コーナーセンサの検出結果に基づく第2条件成立の判別>
項1の車両の衝突予防安全装置において、前記予防制御部は自車の前方及び後方の夫々のコーナーセンサ(64,65)による検出結果を用いて前記第2条件が成立するか否かを判別する。
【0042】
これにより、後方や側方などの死角からの他車の接近を容易に判別可能になる。
【0043】
〔15〕<ステレオカメラで先行車及び当該先行車までの距離を認識>
項1の車両の衝突予防安全装置において、前記先行環境認識部は、ステレオカメラ(63)による撮像データを用いて先行車の認識と当該先行車までの距離を測定する。
【0044】
これにより、先行車の認識と当該先行車までの測距を容易に行うことが可能になる。
【0045】
2.実施の形態の詳細
実施の形態について更に詳述する。
【0046】
《実施の形態1》
図1には本発明に係る車両の衝突予防安全装置を適用した自動車の概略が例示される。同図に示される自動車は特に制限されないが電気自動車である。
【0047】
同図には自動車1のパワートレイン系としてタイヤ2を回転駆動するDCモータ(DCMTR)3とブレーキブースタ(BRKBST)4が例示される。自動車のボディー5の内部はCAN(コントロール・エリア・ネットワーク)バス(CANBUS)10によって電子制御用のネットワークが構成され、CANバス10には代表的に示された複数の電子制御ユニット(ECU)10,20,30,40,50,60,62が接続される。衝突予防安全装置はここではCANバス10に接続された電子制御ユニット(ECU)10,20,30,40,50,60,62とそれらの制御対象回路などによって構成される。
【0048】
10で示されるモータ制御用の電子制御ユニット(MTRECU)はエンジン制御用のマイクロコンピュータを有し、CANバスインタフェース回路を介してCANバス6に接続され、アクセルペダルの操作量など応じたスロットル信号をモータドライバ(MTRDRV)11が受けてDCモータ3の回転数制御及びトルク制御を行う。
【0049】
20で示されるブレーキ制御用の電子制御ユニット(BRKECU)はブレーキ制御用のマイクロコンピュータを有し、CANバストランシーバを介してCANバス6に接続され、ブレーキペダルの操作量などに応じたブレーキ信号に従ってブレーキブースタ4の油圧制御を行う。
【0050】
30で示されるボディー系の電子制御ユニット(BDYECU)はボディー系制御用のマイクロコンピュータを有し、CANバストランシーバを介してCANバス6に接続され、CANバス6からの制御信号に従ってシートベルト(SBLT)31にテンションを加えたり、スピーカ32から警告や音声案内を発する制御を行う。
【0051】
40で示されるGPS((Global Positioning System)用の電子制御ユニット(GPSECU)はGPSレシーバ(GPSRCV)41を制御するマイクロコンピュータを有し、CANバストランシーバを介してCANバス6に接続され、測位動作の指示信号に応答してGPSレシーバ41による測位情報の受信動作を制御する。GPS用の電子制御ユニット40及びGPSレシーバ41は自車位置を測定する自車位置測定部の一例を構成する。
【0052】
50で示されるナビゲーション用の電子制御ユニット(NVECU)はナビゲーション装置(NV)51を制御するマイクロコンピュータを有し、CANバスインタフェース回路を介してCANバス6に接続され、ナビゲーション動作の指示信号に応答して地図情報を検索してディスプレイに表示し、或いはその指示に応答して地図情報をCANバス6に返す動作を制御する。ナビゲーション用の電子制御ユニット50及びナビゲーション装置51は要求に従った地図情報を提供する装置の一例である。
【0053】
60で示されるステレオ画像認識部(STRRCG)はステレオカメラ(STRCMR)63を制御するマイクロコンピュータを有し、CANバストランシーバを介してCANバス6に接続され、画像認識の制御信号に応答してステレオカメラ(STRCMR)63で自車の前方に対する撮像制御を行う。そして、ステレオカメラ(STRCMR)63で撮像された撮像データ(ステレオ撮像データ)を入力し、この撮像データに対する画像認識処理を行って自車の前方の先行車などを認識すると共に当該先行車などとの距離を測定して自車の先行環境を認識する。
【0054】
62で示される電子制御ユニット(RCU)は自動車1全体の走行制御を行う走行制御ユニットとしての意義を備えるとともに、衝突回避の予防制御を行う。この電子制御ユニット62を以下単に衝突回避予防制御部62とも称する。この衝突回避予防制御部62は、衝突回避の予防制御を行うマイクロコンピュータを有し、CABバストランシーバを介してCANバス6に接続されると共に、ステレオ画像認識部60、速度センサ(VSNS)61、自動車の前側のコーナーセンサ(FCSNS)64及び自動車の後ろ側のコーナーセンサ(RCSNS)65に接続され、衝突回避の安全予防制御を行うと共に電力消費の大きなステレオ画像認識動作に対する動作の軽減制御を行う。コーナーセンサ64,65は自車周囲に障害物が存在するか否かを判別する周囲障害物検出部の一例を成す。
【0055】
図2にはステレオ画像認識部60の構成が例示される。ステレオ画像認識部60はマイクロコンピュータ(MCU)100と、このマイクロコンピュー100をCANバス6に接続するCANバストランシーバ(CANTRNSCV)101とを有する。マイクロコンピュータ100は、特に制限されないが、単結晶シリコンのような1個の半導体基板にCMOS集積回路製造技術などによって形成される。マイクロコンピュータ100は、所定の、命令セットを用いたプログラムを実行する中央処理装置(CPU)110、CPU110が実行するプログラムやデータを保持する電気的に書き換え可能な不揮発性メモリ(ROM)111、CXPU110のワーク領域若しくはデータバッファ領域とされるランダムアクセスメモリ(RAM)112、画像認識処理部(IMGRCG)113を備える。更に、タイマ(TMR)114、前記ステレオカメラ63に接続されるカメラインタフェース(CMRIF)115、CANバストランシーバ101に接続されるCANインタフェース(CANIF)116、及び速度センサ61などの出力を受けるその他の外部インタフェース回路(EXIF)117を備える。マイクロコンピュータ100の上記夫々の内部回路は内部バス118を介して相互にアドレスやデータの入出力を行う。
【0056】
ステレオ撮像データを用いた画像認識処理部(IMGRCG)113による画像認識処理について説明する。
【0057】
ステレオカメラ63は、ステレオ光学系として例えば電荷結合素子(CCD)等の個体撮像素子を用いた左右1組のCCDカメラで構成されている。これら1組のCCDカメラは、それぞれ車室内の天井前方に一定の間隔をもって取り付けられ、車外の対象を異なる視点からステレオ撮像し、撮像した画像情報をステレオ画像認識部60に出力する。ステレオ画像認識部60には、ステレオカメラ63から画像情報が入力されるとともに車速センサ61から自車速V等が入力される。このステレオ画像認識部62は、ステレオカメラ63からの画像情報に基づいて自車1の前方の立体物データや白線データ等の前方情報を認識し、これら認識情報等に基づいて自車走行路を推定する。さらに、ステレオ画像認識部60は、認識した立体物データ等に基づいて自車走行路上の先行車の検出を行う。
【0058】
ここで、ステレオ画像認識部60は、ステレオカメラ63から画像情報の処理を、例えば以下のように行う。先ず、ステレオカメラ63で自車進行方向を撮像した1組のステレオ画像対に対し、対応する位置のずれ量から三角測量の原理によって距離情報を生成する。そして、この距離情報に対して周知のグルーピング処理を行い、グルーピング処理した距離情報を予め記憶しておいた三次元的な道路形状データや立体物データ等と比較することにより、白線データ、道路に沿って存在するガードレール、縁石等の側壁データ、車両等の立体物データ等を抽出する。さらに、ステレオ画像認識装置60は、白線データや側壁データ等に基づいて自車走行路を推定し、自車走行路上に存在する立体物であって、自車両1と略同じ方向に所定の速度(例えば、0Km/h以上)で移動するものを先行車として抽出(検出)する。そして、先行車を検出した場合には、その先行車情報として、先行車距離d(=車間距離)、先行車速Vf(=(車間距離dの変化の割合)+(自車速V))、先行車減速度af(=先行車速Vfの微分値)等を演算する。例えば先行車距離はd=Bf/Zによって演算する。Bはステレオカメラ63の左右カメラ間の基線長、fはステレオカメラ63の焦点距離、Zは視差である。
【0059】
尚、先行車の中で、特に、速度Vfが所定値以下(例えば、4Km/h以下)で、且つ、加速していないものは、略停止状態の先行車として認識される。ステレオ画像認識部60は、ステレオカメラ63とともに、先行車認識手段としての機能を実現する。
【0060】
図1で説明した衝突回避予防制御部62による衝突回避の安全予防制御について説明する。
【0061】
衝突回避予防制御部62にはステレオ画像認識部4及び車速センサ61が接続されると共に図示を省略するクルーズコントロールスイッチ等が接続されている。クルーズコントロールスイッチは、例えば、定速走行時の目標車速を設定する車速セットスイッチ、主に目標車速を下降側へ設定変更するコーストスイッチ、主に目標車速を上昇側へ設定変更するリジュームスイッチ等の複数のスイッチ類がステアリングコラムの側部等に設けられた定速走行操作レバーに連結されて構成されている。さらに、この定速走行操作レバーの近傍には、ACC制御(定速走行制御及び追従走行制御)のON/OFFを行う図示を省略するメインスイッチが配設されている。
【0062】
ドライバにより図示しないメインスイッチがONされ、定速走行操作レバーを通じてドライバの希望する車速がセットされると、衝突回避予防制御部62は、自車速がドライバのセットした目標車速に収束するよう、エンジン制御ユニット10及びブレーキ制御ユニット20を通じた車速制御を行う。すなわち、衝突回避予防制御部62は、エンジン制御ユニット10を通じてモータドライバ11の出力電圧制御(モータ3のの回転数制御)を行うことにより、自車速を目標車速に収束させる。さらに、衝突回避予防制御部62は、モータ3の回転数制御のみでは十分な減速度が得られないと判断した場合に、ブレーキ制御ユニット20を通じてブレーキブースタ4からの油圧制御(ブレーキの自動介入制御)を行うことにより、自車速を目標車速に収束させる。これによって定速走行制御が行われる。
【0063】
定速走行制御を行っているとき、ステレオ画像認識部60にて先行車を認識した場合、衝突回避予防制御部62は、定速走行制御から追従走行制御へと移行し、モータの回転制御とブレーキの自動介入制御を行うことによって車間距離を所定値に保とうとする。先行車の急ブレーキなどによってその車間を保てなくなったとき衝突回避予防制御部62は、ブレーキ制御ユニット20による緊急制動を行うと共に、ボディー系の電子制御ユニット30を介してシートベルト(SBLT)31にテンションを加え、スピーカ32から警告や音声案内を発する制御を行う。
【0064】
特に制限されないが、ACC制御のメインスイッチがOFFにされた一般走行においても衝突回避予防制御部62は、上記追従制御と同様に、先行車の急ブレーキなどによってその車間距離が規定以下になったとき、ブレーキ制御ユニット20による緊急制動を行うと共に、ボディー系の電子制御ユニット30を介してシートベルト(SBLT)31にテンションを加え、スピーカ32から警告や音声案内を発する制御を行う。また、衝突回避予防制御部62は、走行中に自車の側方や後方に接近した他車の存在をコーナーセンサ64,65の出力に基づいて検出したときは、ボディー系の電子制御ユニット30を介してスピーカ32から他車接近の警告や音声案内を発する制御を行う。
【0065】
次に、図1で説明した衝突回避予防制御部62によるステレオ画像認識動作の軽減制御について図3に基づいて説明する。上述の定速走行制御及び追従走行制御さらには一般走行時の衝突回避の安全予防制御の内容から明らかなように、衝突回避の安全予防制御が行われているときステレオ画像認識部60はステレオカメラ63からの撮像データを逐次入力して先行車の認識や先行車までの距離の測定などを行い(S1)、その結果などを用いて衝突回避の安全予防処理が行なわれる(S2)。このとき、以下の第1乃至第3条件を満足することにより、衝突回避予防制御部62は、自車の前方の安全確認距離に応じてステレオ画像認識部60による先行車の認識及び測距の処理を軽減する処理を行なう。この軽減処理にはステレオカメラ63による撮像動作を軽減する処理を付随させても良い。
【0066】
軽減処理を行なうときの上記条件は、自車が高速道路上の合流地点以外を走行中である第1条件、周囲所定範囲に他車が存在しない第2条件、及び自車の前方に見通し可能な第1距離以上の道路があってその間に他車が存在しない第1安全距離以上の安全距離が存在する第3件条が成立することである。
【0067】
前記第1条件が成立しているか否かは衝突回避制御部62が自車位置の測位情報と地図情報とに基づいて判別する(S3)。測位情報は、例えばGPSレシーバ41で受信したGPS信号に基づいてGPS用の電子制御部40が取得して衝突回避制御部62に出力する。地図情報は、衝突回避制御部62から与えられる測位情報に基づいてナビゲーション用の電子制御装置50がナビゲーション部51から検索して出力する。一般道路は図5に例示されるように交差点及び歩行者、二輪車が死角から出てくることが多いので予防安全制御を軽減する対象から除外している。高速道路のインターチェンジ(IC)、パーキングエリア(PA)及びサービスエリア(SA)に代表される合流地点は図6に例示されるようにステレオカメラ63による前方の監視領域外から他車が急に接近する場合が想定されるから予防安全制御を軽減する対象から除外している。
【0068】
第2条件が成立しているか否かは衝突回避制御部62がコーナーセンサ64,65による検出結果に基づいて判別する(S4)。例えば図7に例示されるように後方や側方に他車がいる場合でも、追い抜かれた後に危険が発生する可能性があるので周囲から他車が接近している状態がコーナーセンサ64,65で検出された状態があれば予防安全制御を軽減する対象から除外する。
【0069】
第3の条件が成立しているか否かは衝突回避制御部62が、GPSレシーバ41からGPS用の電子制御部40を通じて得られる自車位置の測位情報、自車位置の測位情報に基づいてナビゲーション部51で検索された地図情報、及びステレオ画像認識部60の画像認識処理で得られた先行他車の存否並びに先行他車までの距離に基づいて判別する(S5)。第3条件において自車の前方に見通し可能な第1距離以上の道路があることを条件にしたのは、単に前方に第1距離以上の道路があることしか条件にしない場合には図8に例示されるように途中で屈曲された道路の先のように見通し不能な部分に他の自動車があっても認識し難いからである。すなわち、道路上で、カーブ等の先が見通せない場所があった場合その先で障害物が急に出現する事も考えられるからである。見通し可能な道路であるか否かは、例えば、ステレオカメラ63で白線を認識した上で、形状、または消失点の位置で前方にどれだけの距離の道路があるかによって判別することができる。
【0070】
第3条件が成立するかの判別処理において、安全確認距離Lの判別では、それが(1)L<M2、(2)M2≦L<M1、(3)M1≦Lの何れになるかの判別が行なわれる。安全確認距離Lとは、自車の前方に見通し可能な道路があってその間に他車が存在しないと判別された距離である。見通し可能な道路があるか否かは自車の測位情報と地図情報から判別され、他車が存在しないか否かはステレオ画像認識部60の画像認識処理結果に基づいて判別される。自車位置、認識された安全確認距離L、第1安全確認距離M2、及び第2安全確認距離M1の相対位置関係は図4に例示される通りである。
【0071】
衝突回避制御部62は、ステレオ画像認識部60の画像認識結果から確認された安全確認距離LがL<M2の関係を持つとき、ステレオ画像認識部60に対して処理の軽減は通知せず、基準の頻度でステレオ画像データに対する画像認識を行なう指示I1を与える(S6)。それによってステレオ画像認識部60は例えば毎秒30枚の画像を処理する。
【0072】
また、衝突回避制御部62は、ステレオ画像認識部60の画像認識結果から確認された安全確認距離LがM2≦L<M1の関係を持つとき、ステレオ画像認識部60に対して処理を軽減する通知として、先行車の認識及び測距のための画像認識処理の頻度を低減する指示I2を与える(S7)。それによってステレオ画像認識部60は例えば毎秒8枚の画像を処理する。
【0073】
一方、衝突回避制御部62は、ステレオ画像認識部60の画像認識結果から確認された安全確認距離LがM1≦Lの関係を持つとき、ステレオ画像認識部60に対して先行車の認識及び測距のための画像認識処理を一時停止する指示(I3)を与えると共に、そのときの自車の速度に応じて自車の前方の安全確認距離Lが前記第2安全確認距離M1になるまでの時間を予測し、その予測時間の経過を待って前記停止指示I3をネゲートし且つそれに代えて前記画像認識処理頻度の低減指示I2をアサートする(S8)。安全確認距離Lが前記第2安全確認距離M1になるまでの時間を一旦予測した後に、自車1の速度が変化したときは、当該予測時間をその速度変化に応じて伸縮する。
【0074】
上記実施の形態1によれば以下の作用効果を奏する。
(1)上記第1乃至第3条件を満足することにより走行中の安全を確保でき、この状態を基点に安全を保証できる前方の安全確認距離の範囲でステレオ画像認識部60による先行車の認識及び測距の画像認識処理を軽減することにより、衝突予防機能が害されることなく衝突予防安全装置の低消費電力に寄与する。
(2)第1安全確認距離M2に対する安全確認距離Lが第2安全確認距離M2よりも短いという制限的な範囲ではステレオ画像認識部60による先行車の認識及び測距の画像認識処理頻度を低減するに留めて処理を軽減するから、頻度の低減の範囲でステレオ画像認識部60による先行車の認識及び測距の処理は維持され、先行車に対する衝突予防機能がある程度維持した上で、処理頻度の低減という範囲でステレオ画像認識部60の電力低消を低減させることができる。画像認識処理の頻度を低減するとき、それに合わせてステレオカメラ63の撮像動作についてもその頻度を低くすることにより一層の低消費電力が期待される。
(3)第1安全確認距離M2に対する安全確認距離Lが第2安全確認距離M1よりも長いという安全度が増した範囲ではステレオ画像認識部60による先行車の認識及び測距の画像認識処理を一時停止するから、その間におけるステレオ画像認識部60による電力消費を大きく低減することができる。一時停止期間中はステレオ画像認識部60による先行車の認識及び測距の画像認識処理は全く維持されないので、車両の前進に応じてその安全度が低下する距離関係を予測し、それに基づいて一時停止の指示を頻度低下の指示に変更する処理を予め想定しておくことにより、先行車に対する衝突予防の安全性を保証した上で低消費電力を実現することができる。画像認識処理を一時停止するとき、その停止期間に合わせてステレオカメラ63の撮像動作も停止することにより一層の低消費電力が期待される。
(4)上記第3条件が成立したときの車速に従って予め見積った時間を、その後の車速の変更に応じて伸縮するから、実際の車両走行状態に則って前記ステレオ画像認識部60による処理を再開することができ、先行車に対する衝突予防に高い安全性を有する。
【0075】
また衝突回避予防制御部62が軽減処理を行っている場合、高速道路上の分岐地点または合流地点、屈曲部等の見通し不能地点が所定距離内に接近をした場合、および第1距離を走行完了した場合にナビゲーション用の電子制御装置50による通知信号、コーナーセンサ64,65による自車後方または側方に接近する他車の検知信号、のいずれかが発行された場合は、衝突予防制御部62は軽減処理を終了し通常処理状態に移行する。
【0076】
《実施の形態2》
実施の形態1では第1安全確認距離M1及び第2安全確認距離M1を予め設定した値とし、上記第3条件の成立を判別したときの自車1の速度との関係について言及していない。実施の形態2の衝突予防安全装置では、衝突回避制御部は自車の速度が遅いときに比べて速いときには前記第1安全確認距離M2及び第2安全確認距離M1に大きな値を用いるものとする点が、第1の実施の形態と相違する。その他の構成については実施の形態1と同じであるからその詳細な説明は省略する。
【0077】
この実施の形態2のように車速が早いほど第1安全確認距離M2及び第2安全確認距離M1の値を大きくすることにより衝突予防の安全性が増す。
【0078】
《実施の形態3》
実施の形態1では、安全確認距離Lの判別において、M2≦L<M1の場合には画像認識処理の頻度を低下させ、M1≦Lの場合には画像認識処理を一時停止とした。特に図示はしないが、実施の形態2の車両の衝突予防安全装置は、衝突回避制御部62による前記軽減制御として、前記自車の前方の安全確認距離Lが前記第1安全確認距離M2以上の場合(M2≦L)にはステレオ画像認識部60に先行車の認識及び測距の画像認識処理頻度を低減する指示を与えるものとし、M2≦L<M1及びM1≦Lの判別とそれぞれに対応する処理を行なわないものとする点が実施の形態1と相違される。その他の構成については実施の形態1と同じであるからその詳細な説明は省略する。
【0079】
この実施の形態3のように軽減処理の全てを処理頻度の低減とすることによっても、衝突予防に高い安全性を維持しながら、低消費電力に寄与することができる。
【0080】
尚、実施の形態3においても、前記衝突回避制御部は自車の速度が遅いときに比べて速いときには前記第1安全確認距離M2に大きな値を用いるように構成することも可能である。
【0081】
《実施の形態4》
実施の形態1では、安全確認距離Lの判別において、M2≦L<M1の場合には画像認識処理の頻度を低下させ、M1≦Lの場合には画像認識処理を一時停止とした。特に図示はしないが、実施の形態4の車両の衝突予防安全装置は、衝突回避制御部62による前記軽減制御として、前記自車の前方の安全確認距離が第1安全確認距離M1以上である場合には前記ステレオ画像認識部60に先行車の認識及び測距の画像認識処理を一時停止する指示を与え、そのときの自車の速度に応じて自車の前方の距離が前記第1安全確認距離M1に減ずるまでの時間を予測し、その時間に基づいて前記停止指示を解除するものとする点が実施の形態1と相違される。その他の構成については実施の形態1と同じであるからその詳細な説明は省略する。
【0082】
これにより、第1安全確認距離M1に対する安全距離の範囲でステレオ画像認識部60による先行車の認識及び測距の画像認識処理を一時停止するから、その間におけるステレオ画像認識部60による電力消費を大きく低減することができる。一時停止期間中はステレオ画像認識部60による先行車の認識及び測距の処理は全く維持されないので、車両の前進に応じてその安全度が低下する距離関係を予測し、それに基づいて一時停止の指示を解除するまでの時間を予め想定しておくことにより、先行車に対する衝突予防の安全性を保証した上で低消費電力を実現することができる。ここでこの実施の形態4の第1安全確認距離M1は実施の形態3の第1安全確認距離M2よりも長く設定されることになる。
【0083】
安全確認距離Lが前記第1安全確認距離M1になるまでの時間を一旦予測した後に、自車の速度が変化したときは、前記停止指示を解除するまでの時間をその速度変化に応じて伸縮する処理を採用可能である。
【0084】
この実施の形態4のように軽減処理の全てを画像認識処理の一時停止とすることによっても、衝突予防に高い安全性を維持しながら、低消費電力に寄与することができる。
【0085】
尚、実施の形態4においても、前記衝突回避制御部は自車の速度が遅いときに比べて速いときには前記第1安全確認距離M1に大きな値を用いるように構成することも可能である。
【0086】
以上本発明者によってなされた発明を実施形態に基づいて具体的に説明したが、本発明はそれに限定されるものではなく、その要旨を逸脱しない範囲において種々変更可能であることは言うまでもない。
【0087】
例えば、画像認識の頻度は毎秒の画面数で規定することに限定されず、速度に応じて毎秒10乃至30程度の画面に対する画像認識を数秒間毎に間歇的に行なったりするようにしてもよい。頻度を低減するときはその間にステレオカメラの撮像動作も停止してよい。また、画像認識は全て画像認識処理部113で行なうことに限定されず、一部をCPU110が負担し、或いはCPU110とその動作プログラムで行うようにしてもよい。前記第1安全確認距離及び第2安全確認距離は車両の種類や馬力などに応じて適宜決定すればよい。本発明に係る衝突予防安全装置は自動車に限らずバイクやその他の車両に広く適用することができる。
【符号の説明】
【0088】
1 自動車
3 DCモータ(DCMTR)
4 ブレーキブースタ(BRKBST)
10 モータ制御用の電子制御ユニット(MTRECU)
20 ブレーキ制御用の電子制御ユニット(BRKECU)
30 ボディー系の電子制御ユニット(BDYECU)
40 GPS用の電子制御ユニット(GPSECU)
50 ナビゲーション用の電子制御ユニット(NVECU)
60 ステレオ画像認識部(STRRCG)
63 ステレオカメラ(STRCMR)
62 走行制御ユニット(衝突回避予防制御部)
61 速度センサ(VSNS)
64 自動車の前側のコーナーセンサ(FCSNS)
65 自動車の後ろ側のコーナーセンサ(RCSNS)
100 マイクロコンピュータ(MCU)
101 CANバストランシーバ(CANTRNSCV)
110 中央処理装置(CPU)
113 画像認識処理部(IMGRCG)
【特許請求の範囲】
【請求項1】
自車前方の先行車を認識すると共に当該先行車との距離を測定する先行環境認識部と、
自車位置を測定する自車位置測定部と、
自車周囲に障害物が存在するか否かを判別する周囲障害物検出部と、
前記先行環境認識部による測定結果、前記自車位置測定部による測定結果及び前記周囲障害物検出部による検出結果に基づいて衝突回避の予防制御を行う予防制御部と、を備えた車両の衝突予防安全装置であって、
前記予防制御部は、自車が高速道路の合流地点以外を走行中である第1条件、周囲所定範囲に他車が存在しない第2条件、及び自車の前方に見通し可能な第1距離以上の道路があってその間に他車が存在しない第1安全確認距離以上の安全確認距離が存在している第3件条が成立したとき、自車の前方の安全確認距離に応じて前記先行環境認識部による先行車の認識及び測距の処理を軽減する軽減制御を行う、車両の衝突予防安全装置。
【請求項2】
前記予防制御部は前記軽減制御として、前記自車の前方の安全確認距離が第1安全確認距離以上で第2安全確認距離よりも短い場合には前記先行環境認識部に先行車の認識及び測距の処理頻度を低減する指示を与える、請求項1記載の車両の衝突予防安全装置。
【請求項3】
前記予防制御部は前記軽減制御として、前記自車の前方の安全確認距離が第2安全確認距離以上である場合には前記先行環境認識部に先行車の認識及び測距の処理を一時停止する指示を与え、そのときの自車の速度に応じて自車の前方の道路の距離が前記第2安全確認距離になるまでの時間を予測し、その時間に基づいて前記停止指示を前記処理頻度低減の指示に変更する、請求項2記載の車両の衝突予防安全装置。
【請求項4】
前記予防制御部は前記軽減制御において、一時停止する指示を与えたときの自車の速度に応じて自車の前方の安全確認距離が前記第2安全確認距離になるまでの時間を一旦予測した後に自車の速度が変化したときは、前記停止指示を前記処理頻度低減の指示に変更するまでの時間をその変化に応じて伸縮する、請求項3記載の車両の衝突予防安全装置。
【請求項5】
前記予防制御部は自車の速度が遅いときに比べて速いときには前記第1安全確認距離及び第2安全確認距離に大きな値を用いる、請求項4記載の車両の衝突予防安全装置。
【請求項6】
前記予防制御部は前記軽減制御として、前記自車の前方の安全確認距離が前記第1安全確認距離以上の場合には前記先行環境認識部に先行車の認識及び測距の処理頻度を低減する指示を与える、請求項1記載の車両の衝突予防安全装置。
【請求項7】
前記予防制御部は自車の速度が遅いときに比べて速いときには前記第1安全確認距離に大きな値を用いる、請求項6記載の車両の衝突予防安全装置。
【請求項8】
前記予防制御部は前記軽減制御として、前記自車の前方の安全確認距離が第1安全確認距離以上である場合には前記先行環境認識部に先行車の認識及び測距の処理を一時停止する指示を与え、そのときの自車の速度に応じて自車の前方の距離が前記第1安全確認距離に減ずるまでの時間を予測し、その時間に基づいて前記停止指示を解除する、請求項1記載の車両の衝突予防安全装置。
【請求項9】
前記予防制御部は前記軽減制御において、一時停止する指示を与えたときの自車の速度に応じて自車の前方の安全確認距離が前記第1安全確認距離になるまでの時間を一旦予測した後に前記自車の速度が変化したときには、前記停止指示を解除するまでの時間をその速度変化に応じて伸縮する、請求項8記載の車両の衝突予防安全装置。
【請求項10】
前記予防制御部は自車の速度が遅いときに比べて速いときには前記第1安全確認距離に大きな値を用いる、請求項9記載の車両の衝突予防安全装置。
【請求項11】
前記予防制御部は、前記自車位置測定部による自車位置の測定情報と自車位置に応ずる地図情報とに基づいて前記第1条件が成立しているか否かを判別する、請求項1記載の車両の衝突予防安全装置。
【請求項12】
前記予防制御部は、自車位置測定部による自車位置の測定情報、自車位置に応ずる地図情報、及び先行環境認識部による認識結果に基づいて前記第3条件が成立しているか否かを判別する、請求項11記載の車両の衝突予防安全装置。
【請求項13】
前記予防制御部は自車位置情報として、GPSを用いて測位した情報を用いる、請求項12記載の車両の衝突予防安全装置。
【請求項14】
前記予防制御部は自車の前方及び後方の夫々のコーナーセンサによる検出結果を用いて前記第2条件が成立するか否かを判別する、請求項1記載の車両の衝突予防安全装置。
【請求項15】
前記先行環境認識部は、ステレオカメラによる撮像データを用いて先行車の認識と当該先行車までの距離を測定する、請求項1記載の車両の衝突予防安全装置。
【請求項1】
自車前方の先行車を認識すると共に当該先行車との距離を測定する先行環境認識部と、
自車位置を測定する自車位置測定部と、
自車周囲に障害物が存在するか否かを判別する周囲障害物検出部と、
前記先行環境認識部による測定結果、前記自車位置測定部による測定結果及び前記周囲障害物検出部による検出結果に基づいて衝突回避の予防制御を行う予防制御部と、を備えた車両の衝突予防安全装置であって、
前記予防制御部は、自車が高速道路の合流地点以外を走行中である第1条件、周囲所定範囲に他車が存在しない第2条件、及び自車の前方に見通し可能な第1距離以上の道路があってその間に他車が存在しない第1安全確認距離以上の安全確認距離が存在している第3件条が成立したとき、自車の前方の安全確認距離に応じて前記先行環境認識部による先行車の認識及び測距の処理を軽減する軽減制御を行う、車両の衝突予防安全装置。
【請求項2】
前記予防制御部は前記軽減制御として、前記自車の前方の安全確認距離が第1安全確認距離以上で第2安全確認距離よりも短い場合には前記先行環境認識部に先行車の認識及び測距の処理頻度を低減する指示を与える、請求項1記載の車両の衝突予防安全装置。
【請求項3】
前記予防制御部は前記軽減制御として、前記自車の前方の安全確認距離が第2安全確認距離以上である場合には前記先行環境認識部に先行車の認識及び測距の処理を一時停止する指示を与え、そのときの自車の速度に応じて自車の前方の道路の距離が前記第2安全確認距離になるまでの時間を予測し、その時間に基づいて前記停止指示を前記処理頻度低減の指示に変更する、請求項2記載の車両の衝突予防安全装置。
【請求項4】
前記予防制御部は前記軽減制御において、一時停止する指示を与えたときの自車の速度に応じて自車の前方の安全確認距離が前記第2安全確認距離になるまでの時間を一旦予測した後に自車の速度が変化したときは、前記停止指示を前記処理頻度低減の指示に変更するまでの時間をその変化に応じて伸縮する、請求項3記載の車両の衝突予防安全装置。
【請求項5】
前記予防制御部は自車の速度が遅いときに比べて速いときには前記第1安全確認距離及び第2安全確認距離に大きな値を用いる、請求項4記載の車両の衝突予防安全装置。
【請求項6】
前記予防制御部は前記軽減制御として、前記自車の前方の安全確認距離が前記第1安全確認距離以上の場合には前記先行環境認識部に先行車の認識及び測距の処理頻度を低減する指示を与える、請求項1記載の車両の衝突予防安全装置。
【請求項7】
前記予防制御部は自車の速度が遅いときに比べて速いときには前記第1安全確認距離に大きな値を用いる、請求項6記載の車両の衝突予防安全装置。
【請求項8】
前記予防制御部は前記軽減制御として、前記自車の前方の安全確認距離が第1安全確認距離以上である場合には前記先行環境認識部に先行車の認識及び測距の処理を一時停止する指示を与え、そのときの自車の速度に応じて自車の前方の距離が前記第1安全確認距離に減ずるまでの時間を予測し、その時間に基づいて前記停止指示を解除する、請求項1記載の車両の衝突予防安全装置。
【請求項9】
前記予防制御部は前記軽減制御において、一時停止する指示を与えたときの自車の速度に応じて自車の前方の安全確認距離が前記第1安全確認距離になるまでの時間を一旦予測した後に前記自車の速度が変化したときには、前記停止指示を解除するまでの時間をその速度変化に応じて伸縮する、請求項8記載の車両の衝突予防安全装置。
【請求項10】
前記予防制御部は自車の速度が遅いときに比べて速いときには前記第1安全確認距離に大きな値を用いる、請求項9記載の車両の衝突予防安全装置。
【請求項11】
前記予防制御部は、前記自車位置測定部による自車位置の測定情報と自車位置に応ずる地図情報とに基づいて前記第1条件が成立しているか否かを判別する、請求項1記載の車両の衝突予防安全装置。
【請求項12】
前記予防制御部は、自車位置測定部による自車位置の測定情報、自車位置に応ずる地図情報、及び先行環境認識部による認識結果に基づいて前記第3条件が成立しているか否かを判別する、請求項11記載の車両の衝突予防安全装置。
【請求項13】
前記予防制御部は自車位置情報として、GPSを用いて測位した情報を用いる、請求項12記載の車両の衝突予防安全装置。
【請求項14】
前記予防制御部は自車の前方及び後方の夫々のコーナーセンサによる検出結果を用いて前記第2条件が成立するか否かを判別する、請求項1記載の車両の衝突予防安全装置。
【請求項15】
前記先行環境認識部は、ステレオカメラによる撮像データを用いて先行車の認識と当該先行車までの距離を測定する、請求項1記載の車両の衝突予防安全装置。
【図1】


【図2】
【図3】

【図4】
【図5】

【図6】
【図7】
【図8】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【公開番号】特開2012−226635(P2012−226635A)
【公開日】平成24年11月15日(2012.11.15)
【国際特許分類】
【出願番号】特願2011−94799(P2011−94799)
【出願日】平成23年4月21日(2011.4.21)
【出願人】(302062931)ルネサスエレクトロニクス株式会社 (8,021)
【Fターム(参考)】
【公開日】平成24年11月15日(2012.11.15)
【国際特許分類】
【出願日】平成23年4月21日(2011.4.21)
【出願人】(302062931)ルネサスエレクトロニクス株式会社 (8,021)
【Fターム(参考)】
[ Back to top ]