
Fターム[3D246HA08]の内容
ブレーキシステム(制動力調整) (55,256) | 検知、推定情報−車両情報 (14,591) | アクセルペダル操作 (848)
Fターム[3D246HA08]の下位に属するFターム
戻し操作 (19)
操作速度、操作加速度 (28)
Fターム[3D246HA08]に分類される特許
1 - 20 / 801
車両の緊急制動制御装置及びその方法
車輌停止前後のペダル作動状態に基づき自動制動の解除を判断する車輌
作業車両の回生制御装置および作業車両の回生制御方法
ハイブリッド車両の制御装置
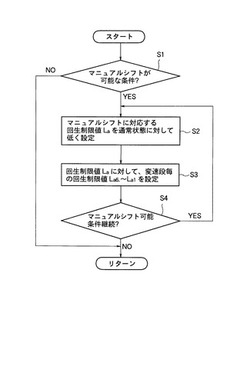
【課題】ブレーキ操作とマニュアルダウンシフトとが重畳する場合であっても、ダウンシフトの際に適切な減速度を発生させ、かつバッテリの耐久性低下を回避することができるハイブリッド車の制御装置を提供する。
【解決手段】マニュアルシフト操作に基づいて複数の変速比の間で変速させるマニュアルシフト手段と、ブレーキ操作に基づいて電動機の回生トルクおよび摩擦ブレーキの摩擦制動トルクによって車両の制動力を制御する制動手段とを備えたハイブリッド車両の制御装置において、蓄電装置の過充電を防止するための通常時回生制限値で前記回生トルクを制限するとともに、前記マニュアルシフト操作の実行が可能な場合に、前記マニュアルシフトによるダウンシフトの実行に先立って、前記通常時回生制限値よりも値が低い回生制限値で前記回生トルクを制限する回生トルク制限手段(ステップS2,S3)とを設けた。
(もっと読む)
車両の制御装置

【課題】アクセルの誤操作を適切に判定することにより、駆動力低下によるドライバビリティの悪化を抑えることのできる車両の制御装置を提供する。
【解決手段】電子制御ユニット1は、駆動輪40の駆動力を低下させる駆動力低下制御を実行する。そして電子制御ユニット1は、車両進行方向における障害物の接近を検出してから所定の判定時間が経過した後にアクセルペダル2が操作されたときには、駆動力低下制御として駆動輪40の制動を行う。
(もっと読む)
車両減速度制御装置
【課題】フェード現象やヴェイパーロック現象を抑制しつつ、ドライバに対して減速すべき状況であることを知らせることができる車両減速度制御装置を提供すること。
【解決手段】ディスクブレーキ及びドラムブレーキの少なくとも一方を用いた減速度と、エンジンブレーキを用いた減速度とを発生させることができる車両に搭載される車両減速度制御装置100であって、ディスクブレーキ及びドラムブレーキの少なくとも一方を用いた減速度を発生させて減速を開始するタイミングであるか否かを判定し(S10,S11)、減速を開始するタイミングであると判定された場合に、エンジンブレーキによって減速度を発生させることで減速を開始するタイミングであることを示す警報を行う(S13)。
(もっと読む)
車両挙動制御装置
【課題】主処理装置が異常になっても、車両の挙動を安定的に制御する。
【解決手段】第1の処理装置10は、車両の利用者からの要求を入力する要求入力センサ2を含む複数のセンサ2、3からの複数の信号を含む第1の情報に基づいて、第1の制御量COM1を演算する。第2の処理装置20は、要求入力センサ2からの信号を含むが、第1の情報より情報量が少ない第2の情報に基づいて、第2の制御量COM2を演算する。第2の処置装置20は、第1の制御量COM1が第2の制御量COM2から許容範囲TH内であると判定されるとき、第1の制御量COM1に基づいて走行機器4を制御する。第2の処置装置20は、第1の制御量COM1が第2の制御量COM2から許容範囲TH外であると判定されるとき、車両の運動量が小さくなる制御量、または車両の運動量の変化が小さい制御量に基づいて走行機器4を制御する。
(もっと読む)
車輪回転速度制御装置
【課題】車両の停車時に発生する車輪回転速度センサからの誤信号を防止する車輪回転速度制御装置を提供する。
【解決手段】4輪の車輪を備える車両の各車輪それぞれの車輪回転速度を検出する車輪回転速度検出手段2a,2b,2c,2dと、各車輪それぞれのブレーキ圧を個別に加圧するブレーキ加圧手段7とを備え、ブレーキ加圧手段7は、車両が停止している状態で、車輪回転速度検出手段2a,2b,2c,2dにより各車輪のいずれかが回転していることが検出された場合に、予め定められた所定時間、車輪のブレーキ圧を加圧する。
(もっと読む)
車両の制動制御装置
【課題】エンジンブレーキが発生する場合においても、ガタ詰めが必要なモードにおいては、ガタ詰めが適切に機能する制動制御装置等を提供する。
【解決手段】自車両に備わる制動制御装置は、本制動の前に、自車両のディスクロータとブレーキパッドとの隙間を詰める事前制動を実行する事前制動部と、自車両の駆動力に基づいて、事前制動部による制動力を算出する算出部と、エンジンブレーキにより自車両の制動を実行するエンジンブレーキ制動部と、事前制動部による事前制動が必要であるか否かを判定する判定部と、事前制動部による制動を制御する制御部とを備え、制御部は、エンジンブレーキ制動部による制動力が、算出部によって算出された事前制動部による制動力よりも大きく、かつ、判定部による判定結果が肯定である場合に、事前制動部による制動を実行する。
(もっと読む)
車両盗難防止制御装置
【課題】車外からの指令に基づいて安全に車両を停止させられる車両盗難防止制御装置を提供する。
【解決手段】車外からの外部停車要求が出されると、それに基づいて車両を停止させる。そして、車両を停止させる際に、所定の減速度、具体的には一定の基準減速度で停止させるようにする。このように、一定の基準減速度で車両を停止することで、急停車させたりすることなく安全に車両を停止させることが可能となる。
(もっと読む)
車両の制御装置
【課題】旋回走行時の車両挙動を安定させる旋回性向上制御を、運転者に違和感やショックを与えることなく、適切に実行することができる車両の制御装置を提供すること。
【解決手段】駆動力および制動力を制御して旋回走行時の車両挙動を安定させる旋回性向上制御を実行する車両の制御装置において、操舵角および操舵角速度を基に推定した横加速度および横ジャークの推定値に基づいて前記駆動力および前記制動力の第1制御量を設定する第1制御量設定手段(ステップS2)と、センサを用いて検出した横加速度および横ジャークの検出値に基づいて前記駆動力および前記制動力の第2制御量を設定する第2制御量設定手段(ステップS3)と、前記第1制御量の絶対値と前記第2制御量の絶対値とのいずれか大きい方を選択して前記旋回性向上制御を実行する旋回性向上制御実行手段(ステップS4)とを設けた。
(もっと読む)
車体挙動安定化装置
【課題】制動制御装置および駆動制御装置を用いた車体挙動安定化装置において、車体挙動安定化制御用のアクチュエータが異常となったときに車体挙動を安定化させる。
【解決手段】モータ・ジェネレータ5および/またはエンジン8の駆動力を制御することで第1の車体挙動安定化制御を実行する駆動制御指令部36と、ブレーキアクチュエータ12c〜12fを駆動制御して前後左右の車輪2・3の制動力を独立制御することで第2の車体挙動安定化制御を実行する制動制御部35と、ブレーキアクチュエータの異常を検出する異常検出部37とを備えた車体挙動安定化装置1において、異常検出部37がブレーキアクチュエータの異常を検出した場合、制動制御部35が2の車体挙動安定化制御を停止するとともに、駆動制御指令部36に対して車体挙動安定化制御の実行指令を出力し、駆動制御指令部36が単独で第1の車体挙動安定化制御を実行するようにする。
(もっと読む)
エンジン再始動制御装置
【課題】車両のエンジンの再始動に際してブレーキペダルの操作が解除された後もエンジンの再始動が完了するまではブレーキ圧を保持する場合に、車両の飛び出し感及びブレーキの引きずり感の防止を図ることである。
【解決手段】時刻t3のブレーキ保持圧は所定圧M2より大きいので、減圧値1を用いてブレーキ保持圧を減圧していく。その後、時刻t4では、ブレーキ保持圧が所定圧M2まで低下したので、減圧値2を用いてブレーキ保持圧を減圧していく。よって、時刻t3〜t4に比べて時刻t4以後はブレーキ保持圧の減圧速度が緩やかになる。
(もっと読む)
車両の制御装置
【課題】エンジンのアイドリングストップを行う車両の坂路発進性をより好適に確保することのできる車両の制御装置を提供する。
【解決手段】エンジンのアイドリングストップに応じて行われるヒルホールド制御を、アイドリングストップからの復帰のためのエンジンの再始動指令がなされ(S101:YES)、かつエンジン回転速度が既定の判定値α以上である(S102:YES)ことを条件に解除する(S104)一方で、そうした条件が成立しても、エンジンがアイドリングストップによる停止の途上にあるときには(S103:YES)、ヒルホールド制御を解除しないようにした。
(もっと読む)
ハイブリッド車両の駆動装置
【課題】クラッチ係合状態からのダウン変速時における変速ショックの抑制と燃費の向上とを両立させるハイブリッド車両の駆動装置を提供する。
【解決手段】クラッチK0が係合された状態からの自動変速機16のダウン変速に先立って、そのクラッチK0のトルク容量を低減させると共に、電気式制動装置74及び前記電動機MGの少なくとも一方による制動力を変化させるものであることから、電気式制動装置74乃至電動機MGにより変速ショックを低減するための補償制御を実行するのに必要なトルクを、クラッチK0のトルク容量低下分だけ確保することができるため、電動機MGによる回生量の減少を抑制しつつ変速ショックの発生を好適に抑制することができる。
(もっと読む)
車載電子制御装置
【課題】ペダルの踏み間違いを検出するための判定条件を運転者に応じて適切に設定する
【解決手段】車両制御システム1では、自車両に取り付けられたブレーキペダルが踏み込まれておらず且つ自車両に取り付けられたアクセルペダルが踏み込まれていない状態(以下、両ペダル非踏込状態という)から、ブレーキペダルまたはアクセルペダルが踏み込まれた状態に移行した時点における、自車両と自車両の前方を走行する先行車両との間の車間距離(以下、先行車間距離という)を学習し、この学習結果と、アクセルペダルが踏み込まれた時点(以下、アクセル踏込時点という)での先行車間距離(以下、アクセル踏込時車間距離という)とを比較することによって、アクセル踏込時点におけるアクセルペダルの操作が間違いであるか否かを判断する。
(もっと読む)
車両の制御装置
【課題】旋回走行時の車両挙動を安定させるための駆動力制御および制動力制御を、運転者に違和感やショックを与えることなく、適切に実行することができる車両の制御装置を提供すること。
【解決手段】操舵角および横加速度に基づいて駆動力もしくは制動力を補正して変化させることにより、旋回走行時の車両挙動を安定させる制駆動力制御を実行可能な車両の制御装置において、ステアリングの切り込み操作および戻し操作における操作時間および/または操作速度を検出するステアリング操作検出手段(ステップS105,S106,S107,S108)と、前記切り込み操作および前記戻し操作が行われる際に、前記操作時間もしくは前記操作速度に基づいて、前記補正により前記駆動力もしくは前記制動力を変化させる際の変化速度を設定する制駆動力設定手段(ステップS110,S111)とを設けた。
(もっと読む)
ブレーキ制御装置
【課題】
ブレーキ操作フィーリングを向上することができるブレーキ制御装置を提供すること。
【解決手段】
回生制動装置を備えた車両に用いられるブレーキ制御装置であって、ドライバのブレーキ操作によってブレーキ液圧を発生するマスタシリンダ4と前記ブレーキ液圧が作用するように構成されたホイルシリンダ5を接続する第1ブレーキ回路(管路11,12)と、マスタシリンダ4内のブレーキ液を増圧し第1ブレーキ回路に接続する第2ブレーキ回路(管路15)を介してホイルシリンダ5へ送る倍力装置(第1ポンプ32)と、第1ブレーキ回路から分岐し、倍力装置に接続する第3ブレーキ回路(管路16,17)と、第3ブレーキ回路に設けられたリザーバ29と、を備えた。
(もっと読む)
車両の走行制御装置
【課題】
勾配のある走行路上で停止して発進する際に、運転者が感じる操縦安定性の低下を回避する。
【解決手段】
制動力制御手段(21)と、制動力制御手段を介して車両を停止状態に保持する停止保持制御手段(11)と、駆動力制御手段(23)と、乗員による発進操作を検出する発進操作検出手段(13)と、走行路の勾配を取得する手段(17)と、発進制御手段(13)と、を備え、発進制御手段は、停止保持制御手段により車両が停止状態に保持されている間に発進操作が検出されると、走行路の下り方向に向かう力と駆動力とを釣り合わせて車両の移動を抑制するための目標駆動力を算出し、前記制動力の解除が終了するまで当該目標駆動力による駆動状態を維持し、制動力の解除に応じて駆動力を増加させて車両を発進させる。
(もっと読む)
車両の制動制御装置
【課題】機械式ブレーキによる制動トルクの応答遅れに拘らず合算トルク(MGトルク+ECBトルク)が適切に制御されるようにしてすり替えショックを抑制する。
【解決手段】すり替え過渡時に車両の制動トルクT2が要求制動トルクT1からずれた場合に、そのずれ(制動トルク偏差ΔT)が小さくなるようにモータジェネレータMGによる制動トルク(MGトルク)がフィードバック補正されるため、油圧ブレーキ62による制動トルク(ECBトルク)の応答遅れに拘らず要求制動トルクT1に応じて合算トルク(MGトルク+ECBトルク)が適切に制御されるようになり、車両の制動トルクT2の瞬間的な低下によるすり替えショックが抑制される。特に、モータジェネレータMGによる制動トルク(MGトルク)は応答性に優れているため、油圧ブレーキ62による制動トルク(ECBトルク)の応答遅れに拘らずすり替えショックを適切に抑制することができる。
(もっと読む)
1 - 20 / 801
[ Back to top ]