
Fターム[3D246HA10]の内容
ブレーキシステム(制動力調整) (55,256) | 検知、推定情報−車両情報 (14,591) | アクセルペダル操作 (848) | 操作速度、操作加速度 (28)
Fターム[3D246HA10]に分類される特許
1 - 20 / 28
車両用姿勢制御装置
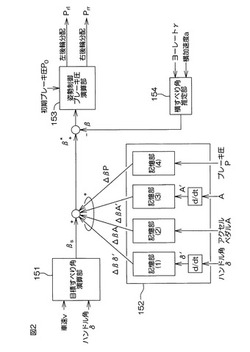
【課題】ペダルの踏み込み量、ハンドル操舵量などを考慮して車両の姿勢制御を行うことにより、ドライバの意図するとおりの旋回走行をアシストすることができる車両用姿勢制御装置を提供する。
【解決手段】操舵角δと車速vとに基づいて、車両旋回時の目標横すべり角βsを算出する目標横すべり角演算部151と、操舵角速度δ′、アクセルペダルの踏み込み量A、アクセルペダルの踏み込み速度A′、フットブレーキペダルの踏み込み量Bの中から選択される少なくとも1つに対応して算出される横すべり角補正量Δβを用いて、前記目標横すべり角演算部151によって算出された目標横すべり角βsを補正する目標横すべり角補正部152と、前記目標横すべり角補正部152によって補正された目標横すべり角β*を用いて車両の姿勢制御を行う。
(もっと読む)
車両用の電動式ブレーキ装置

【課題】車両用の電動式ブレーキ装置において、電気モータの長寿命化を図る。
【解決手段】車両用の電動式ブレーキ装置は、アクセルペダルが操作量減少側に移動している際の速度であるアクセル減少速度を検出するアクセル減少速度検出手段(ステップ108)と、アクセル減少速度検出手段により検出されているアクセル減少速度が小さいほど電気モータに小さな電流を通電して、ブレーキ操作部材が操作される前に制動部材と被制動部材との隙間を第1隙間所定値になるまで小さくするモータ制御手段(ステップ108〜112,124)と、を備えている。
(もっと読む)
車両用制動制御装置
【課題】ドライバーの意図に応じて的確に自動制動を解除可能な車両用制動制御装置を提供する。
【解決手段】自車両と障害物との衝突の危険性に応じて自動的に自車両を制動する車両用制動制御装置であって、自車両と障害物との衝突の危険性が高いか否かを判定する衝突判定手段と、衝突判定手段によって自車両と障害物との衝突の危険性が高いと判定された場合、自車両のブレーキ装置を制御して自動的に制動力を発生させる自動制動手段と、自車両のドライバーによる自車両のアクセルペダルの操作頻度に基づいて、自動制動手段による自動的な制動力の発生を停止する自動制動解除手段とを備えることを特徴とする車両用制動制御装置である。
(もっと読む)
車両の駆動力制御装置
【課題】旋回性能と加減速性能とを両立させることができるように駆動力を制御する装置を提供する。
【解決手段】運転者の加減速操作に基づいて求められる要求駆動力を、操舵に基づいて求められる補正駆動力によって補正して駆動力を求める車両の駆動力制御装置において、前記操舵による旋回要求の度合いを検出する旋回要求検出手段(ステップS3,S4,S11)と、前記旋回要求の度合いに基づいて、前記補正駆動力による駆動力の補正を制限する駆動力補正制限手段(ステップS12,S13,S14)とを備えている。操舵に基づく駆動力の補正を、旋回要求の度合いに応じて変化させるので、旋回特性と加減速特性とを良好な状態に設定できる。
(もっと読む)
自動制動装置
【課題】運転者の加速意図に応じて、迅速に自動ブレーキの解除が可能な自動制動装置1を提供する。
【解決手段】運転者のブレーキペダル操作に依存しない制動力を自動的に発生させる自動制動装置1において、運転者のアクセルペダル操作により、発生していた制動力を減衰係数に応じて減衰させ解除する制御を行う制御手段2と、アクセルペダル操作に基づいて、車両を加速させようとする運転者の加速意図の程度を検出する加速意図検出手段8とを有し、制御手段2は、加速意図の程度に応じて減衰係数を減少させることで、制動力を速く減衰させ解除する。加速意図検出手段8が、アクセルペダル19の開度と、踏込速度と、踏込加速度の中の少なくとも1つが所定値以上であると判定した場合に、制御手段2は、減衰係数を減少させる。
(もっと読む)
自動制御装置
【課題】操作者の意思に反して自動制御が解除されてしまうことを抑制できる自動制御装置を提供する。
【解決手段】自動制動制御手段11は、制動装置20を制御することで自動的に制動力を発生させる自動制動制御を行う。制御解除手段12は、自動制動制御中にアクセルペダル操作量が所定量以上となったと判定したことに基づいて、自動制動制御を解除させるための解除信号を自動制動制御手段11に出力する。ただし、自動制動制御中に運転者がアクセルペダル40を所定量以上踏み込んでしまった場合であっても、誤操作判定手段13により、そのアクセルペダル操作が誤操作であると判定された場合には、制御解除手段12は解除信号を自動制動制御手段11へ出力しない。よって、運転者の意思に反して自動制動制御が解除されてしまうことを抑制できる。
(もっと読む)
制動装置
【課題】運転者に違和感を与えることがなく、またペダル踏み間違いやシフトレバーの入力ミス等による運転者の意思に反した車両挙動を高精度に検出するとともに、最適なタイミングで最適な制動力を付与できる制動装置を提供する。
【解決手段】走行状態判定部が前進位置を判定するとともに、アクセルペダルの踏み込み速度が第1速度閾値Vf以上であることを判定し、かつ驚愕状態判定手段が運転者の驚愕状態を検出したときに所定制動力で車両を制動し、走行状態判定部が後退位置を判定するとともに、アクセルペダルの踏み込み速度が第2速度閾値Vb以上であることを判定し、かつ驚愕状態判定手段が運転者の驚愕状態を検出したときに、所定制動力で車両を制動することを特徴とする。
(もっと読む)
運転操作支援装置、運転操作支援方法
【課題】停車状態を維持するための制動力を運転者のアクセル操作に応じて解除して車両を発進させる際に、車速コントロールの操作性を向上させる。
【解決手段】アクセル操作量Saが第一の閾値th1以下のときには、最終制動力指令値FBを保持制動力指令値FBPKBとし、アクセル操作量Saが第一の閾値th1を超えるときには、アクセル操作量Saが大きいほど、保持制動力指令値FBPKB未満の範囲で最終制動力指令値FBを小さくする(ステップS109)。一方、アクセル操作量Saが第二の閾値th2以下のときには、駆動力指令値FAはクリープトルクTcに設定し、アクセル操作量Saが第二の閾値th2を超えると、アクセル操作量Saが大きいほど、クリープトルクTcよりも大きな範囲で駆動力指令値FAを大きくする(S112)。
(もっと読む)
自動車走行制御装置
【課題】 アクセルペダルの誤操作踏込事故を防止できる自動車走行制御装置を提供すること。
【解決手段】 アクセルペダルの急激な踏み込みを阻止する方向の抵抗力を発生する抵抗力発生機構を設け、上記抵抗力に抗してアクセルペダルを踏み込んだときオンする動作スイッチを設け、アクセルペダルアームにアクセルペダルの踏み込みによりオンするアクセルアームスイッチを設け、上記動作スイッチのオン状態において電源バッテリーを上記アクセルアームスイッチに供給可能に構成し、上記アクセルアームスイッチのオン状態において上記電源バッテリーを該アクセルアームスイッチを介して配電部に供給することにより燃料カット装置を作動し得るように構成し、上記アクセルペダルの上記抵抗力に抗しての急速な踏み込みに基づく上記動作スイッチと上記アクセルアームスイッチのオンに基づいて上記燃料カット装置を作動させる。
(もっと読む)
ブレーキ制御システム
【課題】適切な介入制動を実行可能なブレーキ制御システムを提供する。
【解決手段】車両と車両の周囲の障害物とが衝突するまでに要する衝突予測時間を算出する衝突予測時間算出手段と、衝突予測時間が所定のサービスブレーキ作動閾値以下になった場合、サービスブレーキによる自動介入制動を開始する第2介入制動手段と、衝突予測時間が、サービスブレーキ作動閾値より長いリターダブレーキ作動閾値以下になった場合、リターダブレーキによる介入制動を開始する第1介入制動手段と、リターダブレーキ作動手段によるリターダブレーキの作動中、車両のドライバーにより衝突を回避するための衝突回避操作が実行されたか否かを判定する回避操作判定手段と、衝突回避操作が実行されていないと判定された場合、第2介入制動手段による自動介入制動の開始タイミングを通常より早くするタイミング変更手段とを備えることを特徴とするブレーキ制御システムである。
(もっと読む)
車両用制動制御装置
【課題】車両の急減速を要求する運転者の意図を正確に捉えて車両を速やかに減速させることができる車両用制動制御装置を提供する。
【解決手段】車速を検出する車速検出手段と、ブレーキペダルの踏込の有無又は操作量を検出するブレーキ操作検出手段と、アクセルペダルの踏込の有無又は操作量を検出するアクセル操作検出手段と、内燃機関の吸気通路に備えられた電制スロットル弁の制御を行うスロットル制御手段と、アクセルペダルが踏込まれ車速が所定値以上である状況下において、アクセルペダルの踏込が解除されてから予め定められた所定時間内にブレーキペダルが踏込まれたことが検出されたときに、スロットル制御手段に対して電制スロットル弁の開度を絞るように指示を送る急減速要求判定手段と、を備える。
(もっと読む)
ブレーキと間違え,アクセルを一気に踏み込んでしまった時,速やかにエンジンと車両を停止させるシステム
【課題】突然の飛び出しや身体をひねっての後退運転をする場合などで、ブレーキペダルと間違えてアクセルペダルを一気に踏み込んでしまい事故に至る場合がある。このような場合瞬時にエンジンを停止させ、同時にブレーキを作動させて車両の暴走を防ぎ事故を防止するための機構である。
【解決手段】ブレーキのつもりでアクセルペダルを一気に踏み込んだ場合、アクセルペダルに押されてスイッチが入り、そのスイッチの連動でイグニション回路や燃料ポンプ、あるいはコンピュータなどを停止させ、直ちにエンジンを停止させる。更に、スイッチの連動によって電磁式ブレーキを作動させて車両を停止させるものである。
(もっと読む)
走行支援装置
【課題】車両前方の障害物に関する情報を、道路状況に応じて適切なタイミングで提供する。
【解決手段】障害物の発生位置に基づき目標停止位置Xstopを算出し(ステップS21)、道路形状に基づき自車両が目標停止位置Xstopに至るまでの車速パターンを作成し、この車速パターンで走行する際の運転者の操作負荷量Wloadを、加減速負荷量、操舵負荷量等の身体負荷量と、前方注視負荷量、確認負荷量等の認知負荷量とから予測する(ステップS22)。操作負荷量Wloadがしきい値を超える区間を運転負荷増大区間とし、この区間に目標停止位置Xstopに基準減速度Ginfoで停止するための情報提供位置Xinfoが含まれる場合には、運転負荷増大区間の開始点から所定量だけ自車両よりの位置での車速に基づき、自車両が目標停止位置Xstopに停止するための必要減速度Greqがしきい値を超えているかを判定し、しきい値をこえているときに障害情報の提供を行う。
(もっと読む)
車両制御装置
【課題】ドライバに違和感を与えることなくドライバのペダル操作負担を軽減可能な車両制御装置を提供する。
【解決手段】ドライバのアクセル操作状態を検出するアクセル操作状態検出部と、自車両の速度を減速させる減速装置と、自車両の速度を算出する車体速算出部と、検出されたアクセル操作状態と算出された車体速に基づいて目標車体速を設定し、目標車体速となるように制御する速度制御部を有するコントロールユニットと、を備えた。
(もっと読む)
車両用運転操作補助装置および車両用運転操作補助装置を備えた車両
【課題】運転者の運転意図に反した加減速が行われることのない車両用運転操作補助装置を提供する。
【解決手段】車両用運転操作補助装置は、自車両と前方障害物との余裕時間に基づいて自車両のリスクポテンシャルを算出し、リスクポテンシャルが大きいほどアクセルペダルを操作するときに発生する操作反力を増大させる。またリスクポテンシャルが大きいほど、自車両に発生する駆動力を低下するとともに制動力を増大させる。リスクポテンシャルに応じた制駆動力制御を行う場合に、加速意図の場合は加速抑制までを許可し、一定意図の場合はエンブレまでを許可し、エンブレ意図の場合は緩減速制御までを許可し、緩減速意図の場合は減速制御までを許可し、減速意図の場合は運転者のブレーキペダル操作と制動制御との加算処理までを許可するように、制駆動力制御の作動スケジュールを変更する。
(もっと読む)
制動力制御装置
【課題】不要な制動力が生じることのない制動力制御装置を提供する。
【解決手段】ドライバのアクセルペダル操作量及びアクセルペダル操作速度を検出するアクセルペダルストロークセンサ(アクセルペダル操作量検出手段)と、ドライバのアクセルペダル操作に基づいて制動力指令を作成する制動力制御ECU(制動力指令作成手段)と、制動力制御ECUにより作成された制動力指令に基づいて制動力を発生する制動力制御アクチュエータ(制動手段)と、を有し、制動力制御ECUは、アクセルペダル操作量のペダル戻し方向操作量により制動力指令の大きさを決定し、アクセルペダル操作の戻し方向速度により制動力指令の勾配を決定することとした。
(もっと読む)
車両制御装置
【課題】 ドライバの制動意思に合致した減速開始タイミングを実現できる車両制御装置を提供する。
【解決手段】 コントロールユニット4は、アクセル状態検出部2によりアクセル操作量の減少が検出され、かつ、カーブ検出部8により走行進路にカーブが検出された場合には、ブレーキ制御部5を作動させる。
(もっと読む)
走行制御目標生成装置
【課題】安全性を確保しつつ走行時間の短縮が実現でき、車両乗員の快適性を向上させ得る走行制御目標生成装置を提供する。
【解決手段】走行制御目標生成装置1は、車両の走行状態変化速度を用いて走行制御目標を生成する。走行制御目標生成装置1は、車両の進行方向に沿った所定領域内に存在する可動障害物を検出する可動障害物検出手段と、可動障害物検出手段によって検出された可動障害物との接触が起こり得るか否かを判定する接触可否判定手段と、接触可否判定手段によって可動障害物との接触が起こり得ないと判定されたときは、接触が起こり得ると判定されたときよりも走行状態変化速度が大きくなる走行制御目標で制御する。
(もっと読む)
車両の速度制御装置
【課題】カーブを通過する際、運転者の車両を加速させたいという意志に応じて、運転者の違和感が少なく且つ円滑な速度制御を達成できる車両の速度制御装置を提供すること。
【解決手段】カーブ車速制御において、運転者が加速操作を行わない場合(加速操作量Ap=0)に対応する目標車速Vtoが、第1、第2、第3目標車速Vto1,Vto2,Vto3で構成される特性に従って決定される。Vto1は、地点Pcrまで減少して地点Pcrにて適性車速Vqoとなり、Vto2は、地点Pcrから地点Pcaまで適正車速Vqoに維持され、Vto3は、地点Pcaから地点Pcsまで増大する特性に決定される。運転者による加速操作量Apに基づいて修正車速Vzが演算され、制御中に亘ってVtoにVzが加算されて目標車速Vt(=Vto+Vz)が決定される。そして、車速が目標車速Vtを超えないように調整される。
(もっと読む)
車両制御装置
【課題】 ドライバの制動意思に合致した減速開始タイミングを実現できる車両制御装置を提供する。
【解決手段】 コントロールユニット4は、アクセル状態検出部2によりアクセル操作量の減少またはアクセルオフが検出され、かつ、走行進路状況検出部3により走行進路に減速対象が検出された場合には、ブレーキ制御部5を作動させる。
(もっと読む)
1 - 20 / 28
[ Back to top ]