
Fターム[3D246JA01]の内容
ブレーキシステム(制動力調整) (55,256) | 目標制御量 (1,430) | 車両に関するもの (696)
Fターム[3D246JA01]の下位に属するFターム
Fターム[3D246JA01]に分類される特許
1 - 20 / 31
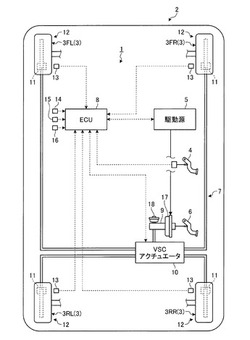
車両挙動制御システム
【課題】車両の挙動を安定化させることができる車両挙動制御システムを提供することを目的とする。
【解決手段】車両2の各車輪3に生じる制動力を個別に調節可能な制動装置7と、制動装置7を制御して車輪3のスリップ状態を制御するABS制御及び車両2の旋回状態を制御する旋回制御を実行可能な制御装置8とを備え、制御装置8は、ABS制御及び旋回制御の作動中に、車両2に作用する横方向加速度の絶対値が予め設定された所定加速度以下である場合に制動力の増加勾配を制限する一方、横方向加速度の絶対値が所定加速度より大きい場合に制動力の増加勾配を制限せず、さらに、制御装置8は、旋回制御における旋回制御量の絶対値が予め設定された所定制御量より大きい場合には制動力の増加勾配を制限しない。
(もっと読む)
車両用ブレーキ液圧制御装置

【課題】車両が横転しそうなときの姿勢の安定性をより向上させる。
【解決手段】旋回中に横転検知パラメータがパラメータ閾値を越えることによって車両の横転傾向が検知されると少なくとも1つの車輪を制動することにより横転抑制制御を実行する車両用ブレーキ液圧制御装置であって、横転検知パラメータを取得するパラメータ取得手段(ロール角算出手段121)と、パラメータ閾値を設定するパラメータ計算手段127とを備え、パラメータ取得手段は、車両のロール角を横転検知パラメータとして取得し、パラメータ計算手段127は、車両のロール角の変化率である閾値計算用ロールレートを算出し、当該閾値計算用ロールレートが大きい程小さい値となるようにパラメータ閾値を設定する。
(もっと読む)
車両の制駆動力制御装置
【課題】 従動輪の制動力および駆動輪の制駆動力を制御し、車両を適切に走行させるとともに車両の挙動を制御する車両の制駆動力制御装置を提供すること。
【解決手段】 電子制御ユニット30は、センサ31,32,33から入力した各検出値に基づいて車両Veの挙動を制御するために各輪11〜14が発生すべき前後力Ffl,Ffr,Frl,Frrを演算する。ユニット30は、従動輪11,12側の前後力Ffl、Ffrの大きさを比較し、大きい方の前後力が駆動力であるか否かを判定する。そして、ユニット30は、大きい方の前後力が駆動力であるときにこの前後力を用いてオフセット前後力FOSを演算し、従動輪11,12の前後力Ffl、Ffrから前後力FOSを減算するとともに駆動輪13,14の前後力Frl,Frrに前後力FOSを加算して、左右前輪11,12および左右後輪13,14の目標前後力Fdfl,Fdfr,Fdrl,Fdrrを演算する。
(もっと読む)
車両のブレーキ保持力制御装置
【課題】車両が停止している路面の勾配と自動変速機の油圧状態に応じてブレーキ力の保持を開放するタイミングを変更することによって車両の違和感の無いスムーズな発進を可能とする車両のブレーキ力保持制御装置を提供すること。
【解決手段】油圧で駆動される自動変速機4を備え、ブレーキ装置7のマスタシリンダ11とホイールシリンダ12とを連通させる液圧通路13に設けられた電磁弁14によってマスタシリンダ11とホイールシリンダ12との連通を遮断し、ブレーキペダル9の踏み込みが解除された後もブレーキ液圧をホイールシリンダ12に残してブレーキ力を保持することができる車両のブレーキ力保持制御装置において、車両が停止状態にあるときに前記自動変速機4の油圧が予め定められた閾値を超えると、その時点で車両の発進が可能であると判断してブレーキ力の保持を解除するECU(制御手段)3を設ける。
(もっと読む)
先行車検知装置
【課題】最適車間維持装置において、隣接車線を走行する車両を先行車両とする誤認識を減少させる。
【解決手段】ECU5は車速センサ2が検出する車速と回転角速度3が検出するヨーレートから算出する車両1の予想進路と、物体検知センサ4が検出し、前方車両判別手段が判別した前方車両との距離を算出し、判定距離設定手段が設定した先行車判定の判定距離と比較する。判定距離は物体検知センサ4が検出した前方車両と車両1との相対速度から算出し、車両1からの相対速度の増加に応じて短く設定することで車両1から高速で離間する前方車両を先行車の判定から除外する。
(もっと読む)
走行制御装置
【課題】車車間通信により目標車間距離変化パターンのデータを受信した車両における乗員の乗り心地の悪化を抑制することができる走行制御装置を提供する。
【解決手段】走行制御装置は、まず目標車間距離を時間経過に従って短くするように変化させる目標車間距離変化パターンL(t)を決定し、この目標車間距離変化パターンL(t)の車間距離変化時間tsにおいて目標車間距離の時間変化量の最大値を求める。そして、目標車間距離の時間変化量の最大値と隊列通信周期Tとの乗算値が閾値Thよりも小さいときは、目標車間距離変化パターンL(t)のデータを後方車両に送信し、目標車間距離の時間変化量の最大値と隊列通信周期Tとの乗算値が閾値Thよりも大きいときは、現在の目標車間距離変化パターンL(t)の車間距離変化時間tsに定数αを加算し、これを新たな車間距離変化時間tsとした目標車間距離変化パターンL(t)を作成する。
(もっと読む)
車間距離制御装置
【課題】先行車両と自車両との車間距離が基準車間距離を超えている場合において、燃料消費率の改善を図る。
【解決手段】ECU4は、車速センサ3が検出する車両1の速度に応じた基準車間距離を算出し、レーダセンサ2が検出する先行車両と車両1との検出車間距離と比較する。検出車間距離が基準車間距離以下の場合は基準車間距離を目標車間距離として車間距離制御を行い、検出車間距離が基準車間距離を超えている場合は基準車間距離を延長した延長車間距離を目標車間距離として車間距離制御を行う。
(もっと読む)
車両用走行制御装置
【課題】追従走行制御に運転者が違和感を感じてしまうことを防止する。
【解決手段】車両用走行制御装置10は、自車両と先行車両との間の車間距離を検出する車間距離センサ24と、自車両の車速を検出する車速センサ21と、車速に基づいて目標車間距離を設定する目標車間距離算出部31および目標車間距離設定部33と、車間距離センサ24により検出された車間距離が目標車間距離に等しくなるように走行制御を行なうと共に、先行車両の停止に追従して自車両を停止させる走行制御部35と、自車両の走行路の勾配を取得する勾配取得部32とを備え、目標車間距離設定部33は、勾配取得部32により取得された勾配と車速センサ21により検出された車速とに基づき、目標車間距離を設定する。
(もっと読む)
ハイブリッド車両の制御装置
【課題】急激な制動制御を予測することで、ロック機構を適切に解放することが可能なハイブリッド車両の制御装置を提供する。
【解決手段】ハイブリッド車両の制御装置は、エンジンと、第1及び第2のモータジェネレータと、係合機構と、プリクラッシュセーフティ装置と、制御手段と、を備える。制御手段は、係合機構の係合時に、プリクラッシュセーフティ装置からの情報に基づき、ブレーキ制御の実行前に係合機構の解放を行う。
(もっと読む)
車両の運動制御装置
【課題】操舵角制御と制動力制御とを組み合わせて旋回操作時における車両の運動制御を行う運動制御装置において、通常時には操舵角制御を反映した実際のタイヤ切れ角に基づいた制動力制御を行う一方、オーバーステア発生時にはタイヤ切れ角の変化が不連続になることによる制動力制御の制御性の悪化を抑制し、或いは、制動力制御に用いる操舵角信号を車両状態に応じて使い分けて、状況に応じた制動力制御の制御性を確保する。
【解決手段】実旋回制御量が目標旋回制御量となるように操舵輪FL,FRの操舵角を制御する操舵制御ECU20と、実旋回制御量が目標旋回制御量となるように車両制動力を制御する制動及びエンジン制御ECU30とを備え、操舵制御ECUが車両オーバーステア時に補正するオーバーステア時操舵角補正量を、制動及びエンジン制御ECUが車両制動力の制御に用いる操舵角信号に反映させないように構成されていることを特徴とする。
(もっと読む)
車両の制動装置
【課題】車両の衝突を検出する衝突センサと、電動モータにより駆動される電動ブレーキ機構を作動させて車輪制動を行う電動パーキングブレーキ装置と、衝突センサからの信号を基に、電動パーキングブレーキ装置の作動を制御するECUと、を備えた車両の制動装置において、車両が停車中に対象物と衝突した場合における該車両の2次衝突の防止と車室内の乗員保護との両立を図ろうとすることにある。
【解決手段】上記対象物と車両との距離を検出するためのレーザセンサを設けておき、ECUにおいて、該レーザセンサからの信号を基に、該車両に対象物が衝突すると予測したときには、EPB装置の車輪制動力を増加させ、その後に、上記衝突センサにより衝突が検出された後は、EPB装置の車輪制動力を該衝突時の衝撃加速度の大小応じて制御するようにした。
(もっと読む)
危険車両判定装置および運転支援システム
【課題】より少ない情報のみを用いて車両の状況に応じて危険を特定することのできる危険車両判定装置およびそれを用いた運転支援システムを提供する。
【解決手段】危険車両判定装置は、それぞれが異なる指向性を有する複数のアンテナと、自車両および周囲の車両の加速度を取得する加速度取得手段と、周囲の車両から送信される電波の前記複数のアンテナの各々における受信電力を取得する受信電力取得手段と、各アンテナにおける受信電力を、各アンテナにあらかじめ定められた重み付け係数を用いて平均する平均受信電力算出手段と、算出した平均受信電力が上位の所定数の車両について、自車両と当該車両との相対加速度が所定の閾値以上である場合に、当該車両を危険車両であると判断する危険判定手段と、を備える。
(もっと読む)
車両制御装置
【課題】電気ブレーキから空気ブレーキへの切替によってブレーキ力が急変するような場合であっても、空気ブレーキへの切替後にブレーキの効き具合を迅速に検知することができ、その結果として停止位置の精度を向上させることができる定位置停止制御装置1を提供する。
【解決手段】定位置停止制御装置1は、電気ブレーキから空気ブレーキへの切替速度域において、ブレーキ指令決定手段25によるブレーキ指令を保持する。これにより、定位置停止制御装置1は、空気ブレーキの立ち上がり完了時に、前記ブレーキ指令に対して整定状態となる制御するとともに、空気ブレーキの立ち上がり完了後に短時間で空気ブレーキの効き具合を検知できるように制御する。
(もっと読む)
制動力制御装置
【課題】
衝突の回避が不可と判断されて自動ブレーキが作動中に、路面の段差により車輪が路面から離れてしまうと輪荷重が減少して制動距離が長くなる。
【解決手段】
本制動力制御装置は、自車と障害物との相対距離及び相対速度を計測する第1のセンサと、路面の段差の上下変化状態及び自車と段差までの距離を計測する第2のセンサと、相対距離及び相対速度に基づいて、自車と障害物とが衝突するか否かを判断する衝突判断部と、上下変化状態及び段差までの距離に基づいて、自車が当該段差を通過する時のサスペンションの制御方向を判断する路面判断部と、ブレーキを制御するブレーキ制御部と、自車の車高を制御する車高制御部と、を備え、車高制御部は、ブレーキ制御部がブレーキを制御した際、車高を現在の車高よりも高く上げるよう制御し、路面に段差がある場合、当該段差の形状に基づいて当該車高の制御を変更する。
(もっと読む)
ブレーキ制御装置
【課題】 運転者に違和感を与えることなく、小型化を図ることが可能なブレーキ制御装置を提供すること。
【解決手段】 高圧要求がなされたときは、基準となる相関のうちブレーキペダル踏力と車両減速度との相関において車両減速度が大きくなる相関に変更し、かつ、ブレーキペダルストローク量と車両減速度との相関において基準となる相関を維持するように油圧ポンプと圧力制御弁を制御することとした。
(もっと読む)
車両用衝突安全制御装置
【課題】衝突安全制御をより適切に行なうことが可能な車両用衝突安全制御装置を提供すること。
【解決手段】車両前方の障害物を検出するための障害物検出手段(10)と、該障害物検出手段の出力に基づき車両前方の障害物との衝突を予測する衝突予測手段(40)と、を備え、該衝突予測手段の予測結果に基づき種々の衝突安全制御を行なう車両用衝突安全制御装置(1)であって、車両のヨー運動を検出するためのヨー運動検出手段(20)を備え、前記衝突予測手段は、第1の予測モード、及び該第1の予測モードに比して車両前方の障害物との衝突可能性を高く予測し易い第2の予測モードで車両前方の障害物との衝突を予測する手段であり、前記第1の予測モードで車両前方の障害物との衝突可能性があると判断している状態において、前記ヨー運動検出手段により所定程度以上のヨー運動が検出されたときに、前記第2の予測モードに移行することを特徴とする。
(もっと読む)
車両の運動制御装置
【課題】カーブ減速制御実行中に車両安定性制御の開始が判定された場合、カーブ減速制御から車両安定性制御へと制御を円滑に移行できる車両の運動制御装置を提供すること。
【解決手段】この装置では、車両が適正な車速でカーブを通過できるようにカーブ減速制御用の制御量に基づいて車輪制動力を制御するカーブ減速制御と、車両のヨー安定性を維持できるように車両安定性制御用の制御量に基づいて車輪制動力を制御する車両安定性制御と、が選択的に実行される。カーブ減速制御実行中において車両安定性制御制御の開始が判定された場合、カーブ減速制御から車両安定性制御へと制御が切り替えられる。制御切替時点以降、車両安定性制御用の制御量にカーブ減速制御用の制御量が加算されて車両安定性制御用の修正制御量が演算され、この修正制御量に基づいて車両安定性制御が実行されていく。これにより、制御切替時点において車両制動力の総和に変化が発生しない。
(もっと読む)
パーキングブレーキを利用した飲酒運転防止システム
【課題】自動的に作動可能なパーキングブレーキを有効利用して確実性と信頼性に優れる飲酒運転防止システムを提供する。
【解決手段】車両には自動的に作動可能なパーキングブレーキが装備され、このパーキングブレーキはPB作動装置にて操作するオートモードとマニュアルモードとに切換え可能である。運転手から出るアルコール濃度を検出するアルコール検知手段と、エンジン始動後にアルコール検知手段によって運転手から所定濃度以上のアルコールを検知しないことを条件としてパーキングブレーキを解除するパーキングブレーキ制御手段とを設けた。
飲酒運転が検知されたときは、オードモードではパーキングブレーキの解除が禁止され、マニュアルモードへの切換えが禁止され、マニュアルモードではオートモードへ強制的に切換えられる。
(もっと読む)
車両用制御装置及び制御システム
【課題】車両を停止状態から走行状態へと移行させるに際し、走行方向とは逆方向へと車両が変位するおそれがあること。
【解決手段】図18(d)に一点鎖線にて示すようにユーザのブレーキ操作によって制動トルクを低減させる場合には、制動トルクと駆動トルクとの合計が、路面の勾配に起因した重力のうちの走行方向とは逆方向の成分と釣り合うトルク(勾配トルクTrg)に満たないために、車両が走行方向とは逆方向へと変位するおそれがある。そこで、車両の加速度がゼロ以上となるまで、駆動トルクと制動トルクとの和が勾配トルクTrgとなるように、制動力を操作する。
(もっと読む)
車両用加速度制御装置
【課題】オーバシュートやアンダーシュートおよびハンチングを防ぎつつ、かつ、目標加速度に対する実加速度の追従性をより高める。
【解決手段】目標加速度の微分値の微分値であるDDTGに基づいてPID制御の比例ゲイン、積分ゲインおよび微分ゲインを設定することで、目標加速度に対する実加速度の追従性をより高めた制御を行うことが可能となる。このように、真に追従性を高めたい場合にのみゲインを大きくすることで、オーバシュートやアンダーシュートおよびハンチングを防ぎつつ、かつ、目標加速度に対する実加速度の追従性をより高めることが可能となる。
(もっと読む)
1 - 20 / 31
[ Back to top ]