
Fターム[3D246EA02]の内容
ブレーキシステム(制動力調整) (55,256) | ブレーキ系以外の制御系との関連制御 (2,202) | 推進装置 (1,150) | エンジン (780)
Fターム[3D246EA02]の下位に属するFターム
Fターム[3D246EA02]に分類される特許
1 - 20 / 669
ハイブリッド車両の制御装置
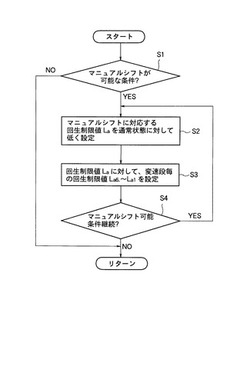
【課題】ブレーキ操作とマニュアルダウンシフトとが重畳する場合であっても、ダウンシフトの際に適切な減速度を発生させ、かつバッテリの耐久性低下を回避することができるハイブリッド車の制御装置を提供する。
【解決手段】マニュアルシフト操作に基づいて複数の変速比の間で変速させるマニュアルシフト手段と、ブレーキ操作に基づいて電動機の回生トルクおよび摩擦ブレーキの摩擦制動トルクによって車両の制動力を制御する制動手段とを備えたハイブリッド車両の制御装置において、蓄電装置の過充電を防止するための通常時回生制限値で前記回生トルクを制限するとともに、前記マニュアルシフト操作の実行が可能な場合に、前記マニュアルシフトによるダウンシフトの実行に先立って、前記通常時回生制限値よりも値が低い回生制限値で前記回生トルクを制限する回生トルク制限手段(ステップS2,S3)とを設けた。
(もっと読む)
車両挙動制御装置

【課題】主処理装置が異常になっても、車両の挙動を安定的に制御する。
【解決手段】第1の処理装置10は、車両の利用者からの要求を入力する要求入力センサ2を含む複数のセンサ2、3からの複数の信号を含む第1の情報に基づいて、第1の制御量COM1を演算する。第2の処理装置20は、要求入力センサ2からの信号を含むが、第1の情報より情報量が少ない第2の情報に基づいて、第2の制御量COM2を演算する。第2の処置装置20は、第1の制御量COM1が第2の制御量COM2から許容範囲TH内であると判定されるとき、第1の制御量COM1に基づいて走行機器4を制御する。第2の処置装置20は、第1の制御量COM1が第2の制御量COM2から許容範囲TH外であると判定されるとき、車両の運動量が小さくなる制御量、または車両の運動量の変化が小さい制御量に基づいて走行機器4を制御する。
(もっと読む)
車両制御システム
【課題】車両の挙動を安定させること。
【解決手段】車両10の旋回状態量に基づいた前輪Wfl,Wfrの転舵角又は前輪Wfl,Wfr及び後輪Wrl,Wrrの夫々の転舵角の制御により車両10の挙動制御を行う車両制御システムにおいて、旋回走行中で且つ前輪Wfl,Wfr及び後輪Wrl,Wrrの夫々の転舵角が制御されており、更に車両10の旋回状態が所定よりも大きい高G旋回領域にある場合に、前記前輪Wfl,Wfr及び後輪Wrl,Wrrの夫々の転舵角の制御における後輪Wrl,Wrrの転舵角制御の介入度合いを減少させる又は当該後輪Wrl,Wrrの転舵角制御を停止させること。
(もっと読む)
駐車支援装置
【課題】駐車エリア内にある突出体の存在を考慮して駐車を支援できる。
【解決手段】 車両の駆動を制御する制御手段と、車両周囲の突出体を検出する検出手段と、前記突出体を囲む所定のエリア内に前記車両を誘導するための誘導経路を生成する生成手段と、を有する。前記制御手段は、前記誘導経路に従って前記所定のエリア内に前記車両を誘導する際、前記車両が前記突出体に所定の距離まで近づくと、前記車両の駆動を遅くする。
(もっと読む)
車両盗難防止制御装置
【課題】車外からの指令に基づいて安全に車両を停止させられる車両盗難防止制御装置を提供する。
【解決手段】車外からの外部停車要求が出されると、それに基づいて車両を停止させる。そして、車両を停止させる際に、所定の減速度、具体的には一定の基準減速度で停止させるようにする。このように、一定の基準減速度で車両を停止することで、急停車させたりすることなく安全に車両を停止させることが可能となる。
(もっと読む)
エンジン再始動制御装置
【課題】車両のエンジンの再始動に際してブレーキペダルの操作が解除された後もエンジンの再始動が完了するまではブレーキ圧を保持する場合に、車両の飛び出し感及びブレーキの引きずり感の防止を図ることである。
【解決手段】時刻t3のブレーキ保持圧は所定圧M2より大きいので、減圧値1を用いてブレーキ保持圧を減圧していく。その後、時刻t4では、ブレーキ保持圧が所定圧M2まで低下したので、減圧値2を用いてブレーキ保持圧を減圧していく。よって、時刻t3〜t4に比べて時刻t4以後はブレーキ保持圧の減圧速度が緩やかになる。
(もっと読む)
車両の制御装置
【課題】エンジンのアイドリングストップを行う車両の坂路発進性をより好適に確保することのできる車両の制御装置を提供する。
【解決手段】エンジンのアイドリングストップに応じて行われるヒルホールド制御を、アイドリングストップからの復帰のためのエンジンの再始動指令がなされ(S101:YES)、かつエンジン回転速度が既定の判定値α以上である(S102:YES)ことを条件に解除する(S104)一方で、そうした条件が成立しても、エンジンがアイドリングストップによる停止の途上にあるときには(S103:YES)、ヒルホールド制御を解除しないようにした。
(もっと読む)
車両の運動制御装置
【課題】
日常運転領域から稼動するハンドル操作に連係した加減速を自動的におこない、限界運転領域で横滑りを確実に低減させるという、違和感が少なく、安全性能向上を可能とする技術および装置を提供する。
【解決手段】
前輪及び後輪の駆動力又は/及び制動力を制御可能な車両の運動制御装置において、横軸に車両の前後加速度、縦軸に車両の横加速度をとるダイアグラムを定義したときに、時間の経過とともに当該ダイアグラム上で曲線的な遷移をするように加減速制御指令を決定するコントローラと、加減速制御指令に基づいて、制動力又は/及び駆動力を決定する制動力駆動力配分部と、を有する。
(もっと読む)
車載電子制御装置
【課題】ペダルの踏み間違いを検出するための判定条件を運転者に応じて適切に設定する
【解決手段】車両制御システム1では、自車両に取り付けられたブレーキペダルが踏み込まれておらず且つ自車両に取り付けられたアクセルペダルが踏み込まれていない状態(以下、両ペダル非踏込状態という)から、ブレーキペダルまたはアクセルペダルが踏み込まれた状態に移行した時点における、自車両と自車両の前方を走行する先行車両との間の車間距離(以下、先行車間距離という)を学習し、この学習結果と、アクセルペダルが踏み込まれた時点(以下、アクセル踏込時点という)での先行車間距離(以下、アクセル踏込時車間距離という)とを比較することによって、アクセル踏込時点におけるアクセルペダルの操作が間違いであるか否かを判断する。
(もっと読む)
車両のブレーキ制御装置
【課題】車両の走行中にエンジンが自動停止し、その後にエンジンを再始動するためにクランキングを行っているときにエンジンの吸気負圧が減少した場合であっても、所要の制動力を発生させることができる車両のブレーキ制御装置を提供すること。
【解決手段】エンジン自動停止・再始動制御手段と、作動中のエンジン1の吸気負圧を利用して運転者のブレーキ踏力をアシストするブースタ(踏力アシスト手段)14と、電動モータ26によって駆動されるポンプによってブレーキ液圧を加圧する加圧制御ユニット21と、を備えた車両のブレーキ制御装置(ECU)13において、再始動条件の成立後にエンジン1の再始動のためのクランキングを行っているときのブースタ14の負圧が設定値以上であるときにはクランキングを中止し、加圧制御ユニット21によってブレーキ液圧を加圧してブースタ14によるアシスト力の不足を補うようにする。
(もっと読む)
非常用制動システム
【課題】アクセルペダルとブレーキペダルを踏み間違えたときに瞬時に車両の挙動を安全側に制御する非常用制動システムを提供する。
【解決手段】この非常用制動システムは、ブレーキペダル26と間違えてアクセルペダル20を踏むなどして車両10が暴走してしまうような状況に陥ったときに、空いている左足で操作できるようにされた非常用ブレーキペダル30を踏み込むことにより、車輪ブレーキ22を作動させるとともにオートマティックトランスミッション14をニュートラルに切り換え、エンジン12から車輪への駆動力を遮断するように構成されている。
(もっと読む)
車両の走行制御装置
【課題】
勾配のある走行路上で停止して発進する際に、運転者が感じる操縦安定性の低下を回避する。
【解決手段】
制動力制御手段(21)と、制動力制御手段を介して車両を停止状態に保持する停止保持制御手段(11)と、駆動力制御手段(23)と、乗員による発進操作を検出する発進操作検出手段(13)と、走行路の勾配を取得する手段(17)と、発進制御手段(13)と、を備え、発進制御手段は、停止保持制御手段により車両が停止状態に保持されている間に発進操作が検出されると、走行路の下り方向に向かう力と駆動力とを釣り合わせて車両の移動を抑制するための目標駆動力を算出し、前記制動力の解除が終了するまで当該目標駆動力による駆動状態を維持し、制動力の解除に応じて駆動力を増加させて車両を発進させる。
(もっと読む)
車両のブレーキ制御装置
【課題】エンジンを自動停止した後にエンジンの再始動に失敗し、その後のポンピングブレーキ操作等によってエンジンの吸気負圧が減少した場合であっても、制動力の低下を防ぐことができる車両のブレーキ制御装置を提供すること。
【解決手段】エンジン自動停止・再始動制御手段と、作動中のエンジン1の吸気負圧を利用して運転者のブレーキ踏力をアシストするブースタ(踏力アシスト手段)14と、電動モータ26によって駆動されるポンプによって所要のブレーキ液圧を発生する加圧制御ユニット21と、を備えた車両のブレーキ制御装置(ECU)13において、再始動条件の成立後にエンジン1の再始動が確認できない状態で車両が走行している場合であって、且つ、ブースタ14の負圧が設定値以上(負圧不足)であるときには加圧制御ユニット21によってブレーキ液圧を加圧してブースタ14によるアシスト力の不足を補うようにする。
(もっと読む)
車体速度制御装置
【課題】運転者に対して快適な運転支援が行われるように車体速度を制御できる車体速度制御装置を提供すること。
【解決手段】ブレーキ制御ECU1が、速度制御位置設定処理を実行することにより、積荷スペースに荷物が搭載された場合には(S12:Yes)、車輪速度の演算される位置(制御位置)として積荷スペースの位置が設定され(S13)、車両VLの走行路が狭幅道路である場合には(S14:Yes,S15:Yes)、車輪速度の演算される位置(制御位置)として旋回外側のフェンダーミラーの先端の位置が設定される。このように、車両における状況や環境に応じて、搭乗者に対する運転支援を行うのに適切な位置を車体速度が制御される位置として設定することができるので、搭乗者に対して快適な運転支援が行われるように車体速度を制御できる。
(もっと読む)
車両の制駆動力制御装置及び制駆動力制御方法
【課題】段差を通過して間もない位置に車両を停止する必要があっても、急な速度変化が発生することを抑制可能とすることを目的とする。
【解決手段】車両の制動力及び駆動力を制御して、取得した目標位置に車両を誘導または駐車する車両の制駆動力制御する際に、段差を通過する際に生じる目標位置に対する車両の相対速度の変動に応じて駆動力指令値を増大する。但し、上記段差を乗り越えるために、当該段差に接触した車輪の上方への変位である車輪の浮き上がりと判定すると、上記付加駆動力分の指令値が小さくなるように、上記駆動力指令値の上昇を抑制する。そして、駆動力指令値の抑制中に制動指令を制動装置に出力する。
(もっと読む)
車両の制動制御装置
【課題】車両の旋回時に、旋回方向内側の車輪に制動力を付与させる旋回時制動制御が運転手の意図に反して行われることを抑制できる車両の制動制御装置を提供する。
【解決手段】ブレーキ用ECUは、作動ボタンがオン状態である場合(ステップS10:YES)、車両の車体速度VS及びステアリングの操舵角Aを取得する(ステップS11,S12)。そして、ブレーキ用ECUは、取得した車体速度VS及び操舵角Aに基づき、規定時間Tthの間、車両の走行状態が直進状態であることが継続中であるという第1の条件が成立した場合(ステップS19:YES)、作動ボタンをオン状態からオフ状態に自動的に変更させる(ステップS20)、又は作動ボタンの操作状態をオフ状態に変更することを促す。
(もっと読む)
車両の制御装置
【課題】クランキング中にABS制御を時間遅れなく行うことができる車両の制御装置を提供すること。
【解決手段】所定の停止条件が成立するとエンジン1を自動停止し、その後に所定の始動条件が成立するとスタータモータ2を起動してエンジン1を再始動する自動停止始動装置と、車両の減速度と各車輪の回転速度及びブレーキ液圧に基づいて前輪4L,4Rと後輪5L,5Rの最適回転速度を算出し、算出した最適回転速度に基づいて電磁弁を開閉制御してブレーキ液圧を制御するABSと、を有する車両の制御装置において、前記自動停止始動装置によるエンジン1の再始動中にABS制御信号を受信すると同時に省電力モードによって前記ABS制御を開始する。ここで、省電力モードによるABS制御においては、ABSのポンプモータを駆動しない。
(もっと読む)
自動走行制御装置
【課題】運転者の自動走行運転への適正な関わりを検出するとともに、運転者の自動走行運転に対する監視放棄を抑制することのできる自動走行制御装置を提供すること。
【解決手段】自動走行制御中の第1所定時間経過後に(S1)、車速を自動走行制御に基づく目標車速から運転監視確認用車速に減速させ(S2、S3)、所定期間内に運転者の反応が検出されなかった場合には(S4〜S9)、運転者への警告を発するとともに自動走行制御を停止する(S10)。
(もっと読む)
車両のエンジン自動停止制御装置
【課題】 走行中においても適切なエンジン停止及び再始動を達成可能な車両のエンジン自動停止制御装置を提供すること。
【解決手段】 本発明の車両のエンジン自動停止制御装置では、走行中に運転者がブレーキペダルを所定の閾値以上操作したときにエンジンを停止するにあたり路面摩擦係数が小さいほど所定の閾値を大きくすることとした。
(もっと読む)
発進補助装置およびこれを搭載した発進補助車両
【課題】車高が変化した場合であっても車体の傾斜状態から路面の傾斜状態を適正に推定して確実に発進補助を行う。
【解決手段】ブレーキペダル9に対する操作に応じて制動力を発生するディスクブレーキ8と、車体1の前後加速度G(傾斜状態)を検出する前後Gセンサ14と、前後Gセンサ14の検出結果に基づいて路面の傾斜度合いB’を推定する路面状態推定部45と、路面の傾斜度合いB’に基づいて路面が坂道であると判定された場合、ブレーキペダル9に対する操作の解除後にもディスクブレーキ8に制動力を保持させる発進補助装置11において、エアスプリング5のストロークSを検出するストロークセンサ18を更に備え、路面状態推定部45が、前後加速度Gに基づく路面(車体)の傾斜度合いBをストロークSを用いて補正することで路面の傾斜度合いB’を正確に推定できるようにする。
(もっと読む)
1 - 20 / 669
[ Back to top ]