
Fターム[3D246HA86]の内容
ブレーキシステム(制動力調整) (55,256) | 検知、推定情報−車両情報 (14,591) | 車体状態 (4,109) | 車体速度 (1,392)
Fターム[3D246HA86]の下位に属するFターム
1つ又は複数の車輪速より演算 (252)
対地速度 (7)
停止状態 (83)
横すべり速度 (11)
Fターム[3D246HA86]に分類される特許
1 - 20 / 1,039
衝突被害軽減装置
車輌停止前後のペダル作動状態に基づき自動制動の解除を判断する車輌
SBW車両の制御方法
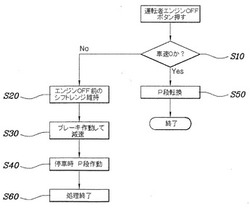
【課題】運転者が意図したエンジンオフ操作はもちろん不注意や非常事態によってエンジンオフ操作をする場合にも、急停車等のように車両の走行に障害をもたらしたり変速機の部品に損傷等が発生したりしないようにし、常に安定したP段転換がなされ、車両の出発時の急発進状況を防止するSBW車両の制御方法を提供する。
【解決手段】車両のエンジンオフ操作がなされると、現在の車速が0であるかを判断する車速判断段階と、現在の車速が0でない場合、エンジンオフ操作以前の変速段を維持する変速段維持段階と、変速段維持段階以後に制動装置を作動させて車速を減少させる減速段階と、減速段階以後の車の停車時にP段に転換するパーキングロック段階、とを含んで構成されたことを特徴とする。
(もっと読む)
ハイブリッド車両の制御装置

【課題】ブレーキ操作とマニュアルダウンシフトとが重畳する場合であっても、ダウンシフトの際に適切な減速度を発生させ、かつバッテリの耐久性低下を回避することができるハイブリッド車の制御装置を提供する。
【解決手段】マニュアルシフト操作に基づいて複数の変速比の間で変速させるマニュアルシフト手段と、ブレーキ操作に基づいて電動機の回生トルクおよび摩擦ブレーキの摩擦制動トルクによって車両の制動力を制御する制動手段とを備えたハイブリッド車両の制御装置において、蓄電装置の過充電を防止するための通常時回生制限値で前記回生トルクを制限するとともに、前記マニュアルシフト操作の実行が可能な場合に、前記マニュアルシフトによるダウンシフトの実行に先立って、前記通常時回生制限値よりも値が低い回生制限値で前記回生トルクを制限する回生トルク制限手段(ステップS2,S3)とを設けた。
(もっと読む)
車両用ブレーキ装置
【課題】 ブレーキペダルのストロークと、ストロークセンサの出力との線形性およびゲインを高める。
【解決手段】 ブレーキペダル12のストロークを検出するストロークセンサScが、ペダル回動軸12bとは軸心を異にして平行に配置されるセンサ回動軸74と、ペダルアーム12cの回動によりセンサ回動軸74まわりに回動するセンサアーム75とを備えており、ストロークセンサScの分解能を他の領域よりも高く設定する領域にあるときに、ペダルアーム12cの回動軌跡の接線T1とセンサアーム75の回動軌跡の接線T2とが平行になるようにしたので、ストロークセンサScに高い検出精度が要求とされるときに、ストロークセンサScの出力特性の線形性を高めて誤差の発生を最小限に抑えることができるだけでなく、ストロークセンサScの取り付け位置にバラツキがあっても、出力特性の変化を最小限に抑えてブレーキフィールを高めることができる。
(もっと読む)
車両の障害物回避装置
【課題】
減速による障害物回避と横移動による障害物回避とを適切に選択できる車両の障害物回避装置を提供すること。
【解決手段】
自車両前方の障害物を認識する障害物認識部11と、自車両が走行している左右両側の車線の車線境界線を認識する車線境界線認識部12と、認識された障害物と認識された車線境界線との間隔Wl,Wrを認識する間隔認識部14と、認識された間隔Wl,Wrが予め設定された自車両の幅Wv以下である方向への横方向への障害物回避を禁止し、間隔Wl,Wrが自車両の幅Wvより大きい方向への横方向への障害物回避を許可し、自車両が認識された車線境界線を跨いで走行しているときには横方向への障害物回避を許可し、横方向への障害物回避が禁止された場合には車両を減速させる回避方向選択部15と、を備えた。
(もっと読む)
車両減速度制御装置
【課題】フェード現象やヴェイパーロック現象を抑制しつつ、ドライバに対して減速すべき状況であることを知らせることができる車両減速度制御装置を提供すること。
【解決手段】ディスクブレーキ及びドラムブレーキの少なくとも一方を用いた減速度と、エンジンブレーキを用いた減速度とを発生させることができる車両に搭載される車両減速度制御装置100であって、ディスクブレーキ及びドラムブレーキの少なくとも一方を用いた減速度を発生させて減速を開始するタイミングであるか否かを判定し(S10,S11)、減速を開始するタイミングであると判定された場合に、エンジンブレーキによって減速度を発生させることで減速を開始するタイミングであることを示す警報を行う(S13)。
(もっと読む)
車両挙動制御装置
【課題】主処理装置が異常になっても、車両の挙動を安定的に制御する。
【解決手段】第1の処理装置10は、車両の利用者からの要求を入力する要求入力センサ2を含む複数のセンサ2、3からの複数の信号を含む第1の情報に基づいて、第1の制御量COM1を演算する。第2の処理装置20は、要求入力センサ2からの信号を含むが、第1の情報より情報量が少ない第2の情報に基づいて、第2の制御量COM2を演算する。第2の処置装置20は、第1の制御量COM1が第2の制御量COM2から許容範囲TH内であると判定されるとき、第1の制御量COM1に基づいて走行機器4を制御する。第2の処置装置20は、第1の制御量COM1が第2の制御量COM2から許容範囲TH外であると判定されるとき、車両の運動量が小さくなる制御量、または車両の運動量の変化が小さい制御量に基づいて走行機器4を制御する。
(もっと読む)
駐車ブレーキ装置
【課題】駐車ブレーキ装置において、動的駐車制御中に後輪のロック解除が検知されたときの駐車ブレーキの作動応答性を向上する。
【解決手段】駐車ブレーキ装置7の制御装置41において、ダイナミックパーキング制御部59は、車両1の走行中に駐車ブレーキ9,11が作動している状態において後輪3,5のロック作動が検知されれば、コントロールケーブル17,19のストロークを解除側に戻すことで駐車ブレーキ9,11をケーブルのストロークが所定ストローク量Bにとなるように解除し、後輪3,5のロック解除が検知されれば、所定の荷重値Pとなるように駐車ブレーキ9,11を作動させるようにアクチュエータ13を制御する。所定ストローク量Bは、ケーブルのストロークがない初期位置から駐車ブレーキ9,11の作動が完全に解除されるブレーキ解除完了時のストロークまでのストローク量である解除完了ストローク量Aよりも、作動側に増加した量である。
(もっと読む)
路面摩擦係数推定装置および車両用ブレーキ液圧制御装置
【課題】横加速度に基づく路面摩擦係数の推定を精度よく行うことを目的とする。
【解決手段】路面摩擦係数推定装置は、横加速度に基づいて第1の路面摩擦係数CF1を推定する第1の推定手段25と、前後加速度に基づいて第2の路面摩擦係数CF2を推定する第2の推定手段26と、路面摩擦係数CF1,CF2の小さい方を路面摩擦係数CFとする選択手段27を備える。選択手段27は、路面限界を超える操舵が行われているか否かを判定する限界操舵判定部を有し、路面限界を超える操舵が行われていると判定したときは、前記第1の路面摩擦係数と前記第2の路面摩擦係数とのうちいずれか小さい方を路面摩擦係数CFとして選択し、路面限界を超える操舵が行われていないと判定したときは、前記第2の路面摩擦係数を路面摩擦係数CFとして選択する。
(もっと読む)
ブレーキ制御装置
【課題】ブレーキ操作時、ペダルストロークに対するホイールシリンダ液圧特性の段付きとペダル反力の変動を小さく抑えることで、ペダルフィールの違和感を緩和すること。
【解決手段】ブレーキ制御装置は、マスターシリンダ13と、VDCブレーキ液圧ユニット2と、マスターシリンダ液圧センサ24と、ブレーキコントローラ7と、を備える。VDCブレーキ液圧ユニット2は、ブレーキ液を吸い込んで吐出する液圧ポンプ22によりポンプアップ液圧を発生する。マスターシリンダ液圧センサ24は、運転者によるブレーキ操作速度を検知する。ブレーキコントローラ7は、ブレーキ操作速度が所定値以上の場合、ポンプアップ液圧によりホイールシリンダ4FL,4FR,4RL,4RRへの液圧を所定値まで増加させる際、ペダルストロークがリザーバポートの閉鎖位置に達するまでのポンプアップ液圧増加速度よりも、ペダルストロークがリザーバポートの閉鎖位置を通過した後のポンプアップ液圧増加速度を遅くする(図3)。
(もっと読む)
制動力制御装置
【課題】目標減速度と実減速度に差が出る制動時、目標減速度に到達する応答性を向上すること。
【解決手段】ハイブリッド車の制動力制御装置は、ブレーキ操作に応じて車輪に付与するマスターシリンダ液圧を発生するブレーキ液圧発生装置1と、統合コントローラ9と、を備える。統合コントローラ9は、マスターシリンダ液圧が所定値より高く、目標減速度と実減速度の差が所定値以上の場合、マスターシリンダ液圧による制動力で不足する減速度の差分をアシスト液圧によるアシスト制動力で補うと共に、フロント側配分とリア側配分による制動力前後配分について、目標減速度と実減速度の差が所定値未満のときの定常時配分と比較してフロント側配分を上げる制御を行う(図3)。
(もっと読む)
ブレーキ制御装置及びブレーキ制御方法
【課題】ブレーキ距離の延伸を抑制すること。
【解決手段】時刻t2において滑走の発生を検知すると、排気制御を開始し(ブレーキ力の低下)、その後、時刻t3において粘着評価値が再給気開始条件を満たすと、給気を開始する(ブレーキ力の増加)。粘着評価値は、ブレーキ力相当値であるBC圧と、車輪の減速度とから求められる。
(もっと読む)
車両の制動制御装置
【課題】車両の制動制御装置において、制動制御の切換え時における車両の走行安定性の向上を可能とする。
【解決手段】左右の後輪RL,RRのスリップ率に応じてブレーキ油圧回路27により左右のホイールシリンダ25を同時に制御する制動力同時制御モードを実行可能な制動力同時制御モード実行部51と、左右のホイールシリンダ25を独立して制御する制動力独立制御モードを実行可能な制動力独立制御モード実行部52と、車両11の減速度が予め設定された減速度閾値を越えたら制動力同時制御モードから制動力独立制御モードへ切換可能な切換制御部53と、車両11の減速度勾配の上昇に応じて減速度閾値を低下させる切換閾値変更部54とを設ける。
(もっと読む)
電動車両のブレーキ制御装置
【課題】回生協調ブレーキ制御時、ブレーキパッドとロータとの間にクリアランス変化が発生しても、良好なブレーキフィーリングと回生エネルギーの確保を達成すること。
【解決手段】ハイブリッド車のブレーキ制御装置は、マスターシリンダと、ホイールシリンダと、VDCブレーキ液圧ユニットと、モータコントローラと、統合コントローラと、を備える。統合コントローラは、ブレーキ操作時、目標減速度を基本液圧分と上乗せ制動分(回生分と加圧分)で達成する回生協調ブレーキ制御を行う。そして、推定したブレーキパッドとロータとの間のクリアランス量が設計値のクリアランス量に対して変化する場合に、実MC圧発生ポイントでの目標減速度が、上乗せ制動分の最大値となるように、設計値からのクリアランス変化量に応じて目標減速度特性を設定する。
(もっと読む)
ブレーキ制御装置
【課題】ブレーキ踏み上げ操作の際、ペダルストロークに対するホイールシリンダ液圧特性が段付き特性になるのを抑えることで、制動減速度のフィーリングを向上すること。
【解決手段】ブレーキ制御装置は、マスターシリンダ13と、VDCブレーキ液圧ユニット2と、ブレーキスイッチ93と、ブレーキコントローラ7と、を備える。VDCブレーキ液圧ユニット2は、両M/Cカットソレノイドバルブ25,26と、低圧リザーバ23からブレーキ液を吸い込む液圧ポンプ22と、によりポンプアップ液圧を発生する。ブレーキコントローラ7は、ブレーキ踏み上げ操作の際、少なくともマスターシリンダ13内のブレーキ液が低圧リザーバ23に流れ込むストローク位置S2から、ホイールシリンダ液圧の低下が終わるストローク位置S3までを含むストローク領域において、ペダルストロークの上昇に対して滑らかな勾配にて前記ホイールシリンダ液圧が増加するように両M/Cカットソレノイドバルブ25,26を制御する(図3)。
(もっと読む)
駐車支援装置
【課題】駐車エリア内にある突出体の存在を考慮して駐車を支援できる。
【解決手段】 車両の駆動を制御する制御手段と、車両周囲の突出体を検出する検出手段と、前記突出体を囲む所定のエリア内に前記車両を誘導するための誘導経路を生成する生成手段と、を有する。前記制御手段は、前記誘導経路に従って前記所定のエリア内に前記車両を誘導する際、前記車両が前記突出体に所定の距離まで近づくと、前記車両の駆動を遅くする。
(もっと読む)
車両の危険回避支援装置
【課題】自車両の前方の他車両における急ブレーキ操作を早期に検出し、車両の運転者による危険回避操作の支援を行なうことができるようにした、車両の危険回避支援装置を提供する。
【解決手段】
他車両2の位置情報と、他車両2のブレーキ操作情報とを含む他車両2の情報を検出する他車両情報検出手段14と、車両1の運転者による危険回避操作を支援する危険回避支援手段18,19とを備え、自車位置情報検出手段13及び他車両情報検出手段14からの情報に基づいて、車両1の前方に他車両2がいることが検出された場合、少なくとも他車両2において急ブレーキ操作がされていることを含む危険回避支援条件が成立したら、危険回避支援手段18,19により危険回避操作を支援する危険回避支援制御手段を備える。
(もっと読む)
車両用姿勢制御装置
【課題】ペダルの踏み込み量、ハンドル操舵量などを考慮して車両の姿勢制御を行うことにより、ドライバの意図するとおりの旋回走行をアシストすることができる車両用姿勢制御装置を提供する。
【解決手段】操舵角δと車速vとに基づいて、車両旋回時の目標横すべり角βsを算出する目標横すべり角演算部151と、操舵角速度δ′、アクセルペダルの踏み込み量A、アクセルペダルの踏み込み速度A′、フットブレーキペダルの踏み込み量Bの中から選択される少なくとも1つに対応して算出される横すべり角補正量Δβを用いて、前記目標横すべり角演算部151によって算出された目標横すべり角βsを補正する目標横すべり角補正部152と、前記目標横すべり角補正部152によって補正された目標横すべり角β*を用いて車両の姿勢制御を行う。
(もっと読む)
車両の衝突時安全装置
【課題】車両衝突時の二次被害を防止および軽減する衝突時安全装置に関し、エアバッグが展開しないような軽度の衝突時の安全策も含めて、簡単な制御によって二次被害を防止および軽減することを目的とする。
【解決手段】自動ブレーキ制御装置5と、エンジン制御装置7と、加速度センサ15と車速センサ17からの信号に基づいて、エアバッグ21、自動ブレーキ制御装置5およびエンジン制御装置7を制御する衝突制御装置9とを備え、衝突制御装置9は衝突時の加速度の大きさを基に重度衝突と軽度衝突とを判定し、重度衝突と判定した場合には、エアバッグを作動させると同時に、自動ブレーキをフルブレーキ状態とし且つエンジンを停止状態にし、軽度衝突と判定した場合には、エアバッグを作動させずに、自動ブレーキを衝突時の加速度に対応した中間ブレーキ力とし且つエンジンを停止状態にすることを特徴とする。
(もっと読む)
1 - 20 / 1,039
[ Back to top ]