
Fターム[3D246HA86]の内容
ブレーキシステム(制動力調整) (55,256) | 検知、推定情報−車両情報 (14,591) | 車体状態 (4,109) | 車体速度 (1,392)
Fターム[3D246HA86]の下位に属するFターム
1つ又は複数の車輪速より演算 (252)
対地速度 (7)
停止状態 (83)
横すべり速度 (11)
Fターム[3D246HA86]に分類される特許
21 - 40 / 1,039
車両の制動制御装置
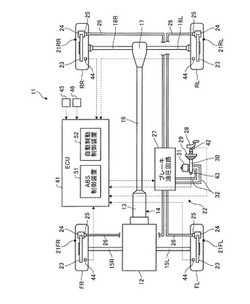
【課題】車両の制動制御装置において、制動時における車両の挙動を安定させることで安全性の向上を可能とする。
【解決手段】ECU41として、車輪FR〜RLのスリップが抑制されるように制動装置22を作動制御するABS制御装置51と、車両11の周辺情報に基づいて制動装置22を作動制御する自動制動制御装置52と、ABS制御装置51の作動開始の閾値を自動制動制御装置52の非作動時より自動制動制御装置52の作動時の方が小さくなるように変更する作動開始閾値変更装置とを設ける。
(もっと読む)
エンジン再始動制御装置

【課題】車両のエンジンの再始動に際してブレーキペダルの操作が解除された後もエンジンの再始動が完了するまではブレーキ圧を保持する場合に、車両の飛び出し感及びブレーキの引きずり感の防止を図ることである。
【解決手段】時刻t3のブレーキ保持圧は所定圧M2より大きいので、減圧値1を用いてブレーキ保持圧を減圧していく。その後、時刻t4では、ブレーキ保持圧が所定圧M2まで低下したので、減圧値2を用いてブレーキ保持圧を減圧していく。よって、時刻t3〜t4に比べて時刻t4以後はブレーキ保持圧の減圧速度が緩やかになる。
(もっと読む)
車両用ブレーキ液圧制御装置
【課題】前輪用の車輪ブレーキおよび後輪用の車輪ブレーキに作用せしめるブレーキ液圧を個別に増減調整可能な液圧調整ユニットの作動を、同軸上にある左右の前輪および後輪用の車輪ブレーキのブレーキ液圧間で許容される許容差圧となるように制御する車両用ブレーキ液圧制御装置において、路面状態に応じて同軸上の左右の前輪および後輪用の車輪ブレーキのブレーキ液圧を独立に制御可能とする。
【解決手段】左右の車輪の接地路面の摩擦係数が大きく異なるスプリット路であるか否かをスプリット路判定手段31で判定し、路面の摩擦係数が所定摩擦係数よりも低い低摩擦係数の路面であるか否かを低摩擦係数路判定手段32で判定し、スプリット路判定手段31の判定結果がスプリット路である状態ならびに低摩擦係数路判定手段32の判定結果が低摩擦係数路である状態のいずれかのときに、路面摩擦係数に対応した許容差圧の適用を禁止する。
(もっと読む)
車両用ブレーキ液圧制御装置
【課題】前輪用の車輪ブレーキおよび後輪用の車輪ブレーキに作用せしめるブレーキ液圧を個別に増減調整可能な液圧調整ユニットの作動を、同軸上にある左右の前輪および後輪用の車輪ブレーキのブレーキ液圧間で許容される許容差圧となるように制御する車両用ブレーキ液圧制御装置において、路面の摩擦係数に安定して対応した許容差圧が得られるようにする。
【解決手段】制御対象の車輪と同軸上にある他の車輪の車輪ブレーキのアンチロックブレーキ制御に伴う減圧開始時の液圧であるロック液圧をロック液圧取得手段29が取得し、許容差圧設定手段27は、少なくともロック液圧取得手段29で得たロック液圧に基づいて路面摩擦係数に対応した許容差圧を設定する。
(もっと読む)
先行車追従走行装置及び運転支援システム
【課題】先行車追従走行を行うものにおいて、燃費の悪化をより抑制することを可能にする。
【解決手段】先行車の速度と、車車間通信で取得した先行車と同一道路上の先行車の進行方向前方に位置する先行車前方車の速度情報とをもとに、当該先行車前方車の速度が先行車の速度よりも所定値以上小さいか否かを判定する。そして、肯定判定した場合であって、且つ、自車の速度が先行車の速度以下の場合には、先行車追従制御を中断し、自車の速度を維持することで加速を抑制する。
(もっと読む)
車両の運動制御装置
【課題】
日常運転領域から稼動するハンドル操作に連係した加減速を自動的におこない、限界運転領域で横滑りを確実に低減させるという、違和感が少なく、安全性能向上を可能とする技術および装置を提供する。
【解決手段】
前輪及び後輪の駆動力又は/及び制動力を制御可能な車両の運動制御装置において、横軸に車両の前後加速度、縦軸に車両の横加速度をとるダイアグラムを定義したときに、時間の経過とともに当該ダイアグラム上で曲線的な遷移をするように加減速制御指令を決定するコントローラと、加減速制御指令に基づいて、制動力又は/及び駆動力を決定する制動力駆動力配分部と、を有する。
(もっと読む)
ハイブリッド車両の駆動装置
【課題】クラッチ係合状態からのダウン変速時における変速ショックの抑制と燃費の向上とを両立させるハイブリッド車両の駆動装置を提供する。
【解決手段】クラッチK0が係合された状態からの自動変速機16のダウン変速に先立って、そのクラッチK0のトルク容量を低減させると共に、電気式制動装置74及び前記電動機MGの少なくとも一方による制動力を変化させるものであることから、電気式制動装置74乃至電動機MGにより変速ショックを低減するための補償制御を実行するのに必要なトルクを、クラッチK0のトルク容量低下分だけ確保することができるため、電動機MGによる回生量の減少を抑制しつつ変速ショックの発生を好適に抑制することができる。
(もっと読む)
車載電子制御装置
【課題】ペダルの踏み間違いを検出するための判定条件を運転者に応じて適切に設定する
【解決手段】車両制御システム1では、自車両に取り付けられたブレーキペダルが踏み込まれておらず且つ自車両に取り付けられたアクセルペダルが踏み込まれていない状態(以下、両ペダル非踏込状態という)から、ブレーキペダルまたはアクセルペダルが踏み込まれた状態に移行した時点における、自車両と自車両の前方を走行する先行車両との間の車間距離(以下、先行車間距離という)を学習し、この学習結果と、アクセルペダルが踏み込まれた時点(以下、アクセル踏込時点という)での先行車間距離(以下、アクセル踏込時車間距離という)とを比較することによって、アクセル踏込時点におけるアクセルペダルの操作が間違いであるか否かを判断する。
(もっと読む)
車両の制動力制御装置
【課題】車両旋回時のタイヤのコーナリングフォースを有効に最大限発揮させ、安定した車両挙動でカーブ外側へのコースアウトを確実に防止する。
【解決手段】車速V、ハンドル角θHに基づいて目標横加速度を算出し、目標横加速度と実際の横加速度とに基づいて車両1に付加すべき第1の付加ヨーモーメントMzt1を算出し、目標横加速度と実際の横加速度とに基づいて第1の付加ヨーモーメントMzt1に加えて車両1に付加すべき第2の付加ヨーモーメントMzt2を算出し、第1の付加ヨーモーメントMzt1に基づいて旋回内側車輪に付加する制動力を第1の制動力FB1として算出し、第2の付加ヨーモーメントMzt2に基づいて旋回内側車輪と旋回外側車輪との間の制動力差を変えることなく車両1に付加する制動力を第2の制動力FB2として算出し、第1の制動力FB1と第2の制動力FB2に基づいて各輪に付加する制動力を算出する。
(もっと読む)
非常用制動システム
【課題】アクセルペダルとブレーキペダルを踏み間違えたときに瞬時に車両の挙動を安全側に制御する非常用制動システムを提供する。
【解決手段】この非常用制動システムは、ブレーキペダル26と間違えてアクセルペダル20を踏むなどして車両10が暴走してしまうような状況に陥ったときに、空いている左足で操作できるようにされた非常用ブレーキペダル30を踏み込むことにより、車輪ブレーキ22を作動させるとともにオートマティックトランスミッション14をニュートラルに切り換え、エンジン12から車輪への駆動力を遮断するように構成されている。
(もっと読む)
車両の走行制御装置
【課題】制動条件の異なる2以上の制御モードを協調して車両を走行制御する際に、制御モードの切替を適切に行うことを可能とする。
【解決手段】互いに異なる制動条件で車両を制駆動制御する2以上の制御モードを協調制御して、走行状態に基づき採用する制御モードを切り替える車両の走行制御装置4である。走行路の勾配の状態に応じて、カーブ減速制御モードから一定速制御モードへの切替の閾値を変更する。具体的には、下り勾配であるほど、上記閾値を高くする。
(もっと読む)
車両の制動制御装置
【課題】機械式ブレーキによる制動トルクの応答遅れに拘らず合算トルク(MGトルク+ECBトルク)が適切に制御されるようにしてすり替えショックを抑制する。
【解決手段】すり替え過渡時に車両の制動トルクT2が要求制動トルクT1からずれた場合に、そのずれ(制動トルク偏差ΔT)が小さくなるようにモータジェネレータMGによる制動トルク(MGトルク)がフィードバック補正されるため、油圧ブレーキ62による制動トルク(ECBトルク)の応答遅れに拘らず要求制動トルクT1に応じて合算トルク(MGトルク+ECBトルク)が適切に制御されるようになり、車両の制動トルクT2の瞬間的な低下によるすり替えショックが抑制される。特に、モータジェネレータMGによる制動トルク(MGトルク)は応答性に優れているため、油圧ブレーキ62による制動トルク(ECBトルク)の応答遅れに拘らずすり替えショックを適切に抑制することができる。
(もっと読む)
移動体通信装置及び追突防止支援方法
【課題】感知エリア外に追突する可能性がある他の移動体(他の車両)が存在する可能性があるときに、当該追突する可能性がある他の移動体(他の車両)との事故を未然に防ぐ追突防止支援を行う移動体通信装置及び追突防止支援方法を提供すること。
【解決手段】移動体に備えられ、感知器が検出した感知エリアに存在する他の移動体の情報を含む情報を受信する通信部と、前記感知エリアに他の移動体が存在するときに、報知部を介して減速目標位置に到達するまでに前記移動体の移動速度を減速目標速度にするよう報知を行う制御部と、を備える移動体通信装置であって、前記制御部は前記感知エリアに存在する他の移動体の情報に基づいて、前記感知エリア外に追突する可能性がある他の移動体が存在するか否かを判断し、前記感知エリア外に追突する可能性がある他の移動体が存在すると判断したときは、前記減速目標位置及び/又は前記減速目標速度を変更することとする。
(もっと読む)
車両の制御装置
【課題】車両がストール状態のときに電動機に駆動電流を供給する電源電力供給回路の負担を軽減するとともに、ブレーキ装置の状態に関わらず安定的に車両の後退を抑制して、商品性の向上を図ることができる車両の制御装置を提供する。
【解決手段】ストール状態であると判定された状態で、電源電力供給回路の温度が所定値以上の温度に上昇したときに、電動機の出力トルクを減少させるようにモータトルク指令値を生成すると共に、ブレーキ装置の制動力を、電動機の出力トルクの減少分と等価な制動力で増加させるようにブレーキトルク指令値を生成する処理を実行すると共に、該ブレーキトルク指令値を生成する処理を実行しているときに車両の後退が検出された場合に、車両が後退しなくなるまでブレーキトルク指令値を補正する。
(もっと読む)
車両の制動制御装置
【課題】車両の旋回時に、旋回方向内側の車輪に制動力を付与させる旋回時制動制御が運転手の意図に反して行われることを抑制できる車両の制動制御装置を提供する。
【解決手段】ブレーキ用ECUは、作動ボタンがオン状態である場合(ステップS10:YES)、車両の車体速度VS及びステアリングの操舵角Aを取得する(ステップS11,S12)。そして、ブレーキ用ECUは、取得した車体速度VS及び操舵角Aに基づき、規定時間Tthの間、車両の走行状態が直進状態であることが継続中であるという第1の条件が成立した場合(ステップS19:YES)、作動ボタンをオン状態からオフ状態に自動的に変更させる(ステップS20)、又は作動ボタンの操作状態をオフ状態に変更することを促す。
(もっと読む)
車両の運動制御装置
【課題】簡単な構成でハンドル角が小さな低横加速度旋回領域とハンドル角が大きな高横加速度旋回領域を含む全横加速度旋回領域において車両の運動状態を的確に制御して操縦安定性を高めることができる車両の運動制御装置を提供すること。
【解決手段】車速とハンドル角に基づいて目標ヨー角速度を算出し、算出された目標ヨー角速度と実際のヨー角速度との偏差が実質的に0になるよう車両の運動を制御するECU(制御手段)と、を備える車両の運動制御装置において、前記ECUは、ハンドル角が所定の閾値よりも小さい低横加速度旋回領域においてはハンドル角に比例する目標ヨー角速度を使用し、ハンドル角が前記閾値よりも大きい高横加速度旋回領域においてはハンドル角に依存しない最大横加速度で車両が定常円旋回するときのヨー角速度を目標ヨー角速度として使用して車両の運動を制御する。
(もっと読む)
自動走行制御装置
【課題】運転者の自動走行運転への適正な関わりを検出するとともに、運転者の自動走行運転に対する監視放棄を抑制することのできる自動走行制御装置を提供すること。
【解決手段】自動走行制御中の第1所定時間経過後に(S1)、車速を自動走行制御に基づく目標車速から運転監視確認用車速に減速させ(S2、S3)、所定期間内に運転者の反応が検出されなかった場合には(S4〜S9)、運転者への警告を発するとともに自動走行制御を停止する(S10)。
(もっと読む)
車両制御装置、および車両制御プログラム
【課題】車両の危険状態を抑制するための車両制御装置において、運転者がアクセルとブレーキとを踏み間違えたときに、車速が大きくなる前に危険状態を抑制できるようにする。
【解決手段】誤操作防止システムを構成する制御部は、アクセルの操作量の情報を示すアクセル情報を繰り返し取得し、アクセル情報に基づいて、アクセルの操作量が、予め設定された減少判定時間以内に減少閾値以上減少し、その後、予め設定された増加判定時間以内に増加した場合、運転者がアクセルとブレーキとを踏み間違えたものと判断する(S150、S160)。そして、踏み間違いと判断された場合、当該車両の加速を抑制する(S290)。このシステムによれば、アクセルの操作量が減少後に増加すれば直ちに当該車両の加速を抑制することができるので、車速が大きくなる前に加速を抑制することができる。
(もっと読む)
発進補助装置およびこれを搭載した発進補助車両
【課題】車高が変化した場合であっても車体の傾斜状態から路面の傾斜状態を適正に推定して確実に発進補助を行う。
【解決手段】ブレーキペダル9に対する操作に応じて制動力を発生するディスクブレーキ8と、車体1の前後加速度G(傾斜状態)を検出する前後Gセンサ14と、前後Gセンサ14の検出結果に基づいて路面の傾斜度合いB’を推定する路面状態推定部45と、路面の傾斜度合いB’に基づいて路面が坂道であると判定された場合、ブレーキペダル9に対する操作の解除後にもディスクブレーキ8に制動力を保持させる発進補助装置11において、エアスプリング5のストロークSを検出するストロークセンサ18を更に備え、路面状態推定部45が、前後加速度Gに基づく路面(車体)の傾斜度合いBをストロークSを用いて補正することで路面の傾斜度合いB’を正確に推定できるようにする。
(もっと読む)
電動パーキングブレーキ装置
【課題】路面の勾配に応じた荷重の目標値を短時間で決定可能な電動パーキングブレーキ装置を提供する。
【解決手段】電動パーキングブレーキ装置は、パーキングブレーキと、アクチュエータと、勾配センサと、荷重センサと、制御部と、を有している。制御部は、アクチュエータ目標荷重値を決定する荷重値決定と荷重センサの出力に基づいてアクチュエータによる荷重がアクチュエータ目標荷重値まで到達するようにアクチュエータを制御する駆動制御とを行う。制御部は、荷重値決定において、勾配センサからの勾配値の時系列における変曲点を判定し、変曲点以降の勾配値の時系列と予め定められたフィルタ係数とに基づいて、勾配値の収束値を推定することにより推定勾配を算出するフィルタ処理を行い、推定勾配に基づいてアクチュエータ目標荷重値を決定する。
(もっと読む)
21 - 40 / 1,039
[ Back to top ]