
Fターム[3D246HA91]の内容
ブレーキシステム(制動力調整) (55,256) | 検知、推定情報−車両情報 (14,591) | 車体状態 (4,109) | 車体速度 (1,392) | 停止状態 (83)
Fターム[3D246HA91]に分類される特許
1 - 20 / 83
制動制御装置
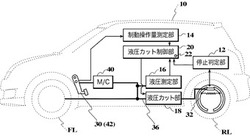
【課題】 ブレーキからの異音発生を防止すること。
【解決手段】 車両10が停止しているか否かを判定する停止判定部12と、ブレーキ操作部材30の制動操作量を測定する制動操作量測定部14と、ドラムブレーキ32へ供給される液圧を測定する液圧測定部16と、前記ドラムブレーキ32への所定圧以上の前記液圧をカットする液圧カット部18と、前記液圧カット部18の動作を制御する液圧カット制御部20とを備え、この液圧カット制御部20が、前記車両10の停止後で、前記制動操作量が所定値を超え、かつ、前記液圧が前記所定圧を超えた際に、前記液圧カット部18を動作させて前記所定圧以上の液圧をカットさせる停止時高圧抑制制御22を備えた。
(もっと読む)
ブレーキシステム

【課題】
大型化を抑制しつつ、フェード時にホイールシリンダを増圧することができるブレーキシステムを提供すること。
【解決手段】
ブレーキ操作に応じてリザーバ4から遮断されて液圧室33にて液圧を発生するマスタシリンダ3と、リザーバ4から液圧室33へのブレーキ液の流れを許容する逆止弁9とを有し、フェード状態にあると判定したとき、液圧室33とホイールシリンダ6との間に設けられた液圧ユニット5が、逆止弁9を介してリザーバ4のブレーキ液を吸引し、ホイールシリンダ6へ供給することとした。
(もっと読む)
車両の制御装置
【課題】エンジンのアイドリングストップを行う車両の坂路発進性をより好適に確保することのできる車両の制御装置を提供する。
【解決手段】エンジンのアイドリングストップに応じて行われるヒルホールド制御を、アイドリングストップからの復帰のためのエンジンの再始動指令がなされ(S101:YES)、かつエンジン回転速度が既定の判定値α以上である(S102:YES)ことを条件に解除する(S104)一方で、そうした条件が成立しても、エンジンがアイドリングストップによる停止の途上にあるときには(S103:YES)、ヒルホールド制御を解除しないようにした。
(もっと読む)
車両停止判定装置
【課題】 精度良く車両停止状態を判断可能な車両停止判定装置を提供すること。
【解決手段】 本発明の車両停止判定装置にあっては、運転者の操作以外によってエンジンの停止・再始動が行われる動力源と、従動輪及び駆動輪の車輪速を検出する車輪速検出手段と、前記車輪速検出手段により検出された従動輪車輪速が回転停止を第1所定時間以上継続し、かつ、駆動輪車輪速が回転停止を前記第1所定時間より長い第2所定時間以上継続したときは車両停止と判定する車両停止判定手段と、を備えた。
(もっと読む)
車両用制動支援装置
【課題】坂路にて自車両の停止中に自動制動の制動力を解除した際に、自車両の動作が運転者が意図しないものになることを防止する。
【解決手段】車両用衝突回避制動支援装置1は、障害物との接近に関するリスクポテンシャルを算出するリスクポテンシャル演算部31と、走行路の勾配を検出する外乱推定部32と、自車両が停止中に、リスクポテンシャルに基づき自車両に付与した制動力を解除する際のその減少度合いを、リスクポテンシャル及び走行路の勾配に基づいて変更する制動力演算部40とを備える。
(もっと読む)
電動パーキングブレーキ装置
【課題】通常の使用時においての解除時間が長くなく、走行中の電動パーキングブレーキを作動させた場合においても確実に解除できる電動パーキングブレーキ装置を提供すること。
【解決手段】ステップS1において、パーキングブレーキを作動させる場合には、ステップS2に移行してアクチュエータを作動させる。ストロークセンサからの測定されたストローク値を制御部が取り込んで記憶部に作動ストローク値として記憶する。ステップS3において、作動時の車両の車速が0km/hか、あるいは車速が0km/hより大きいかを車速センサからの信号により車速判断部が判断をする。車両が走行していると判断した場合には、ステップS5に移行し、制御部はパーキングブレーキを解除させるための解除ストローク目標値を、実際の作動ストローク値の値として解除制御する。
(もっと読む)
ハイブリッド車両の坂道でのバック防止制御方法
【課題】ハイブリッド車両に既存のEHSシステムを適用し、そのEHSシステムの動作状態を判断することで、車両のアイドルストップまたはEVモードの走行条件でも坂道発進の出発遅延及びバックする現象を防止するハイブリッド車両の坂道でのバック防止制御方法を提供する。
【解決手段】坂道発進補助装置(EHS)を備えたハイブリッド車両の坂道でのバック防止制御方法において、坂道での登坂走行の際、一旦停車してから再出発する場合、ハイブリッド制御器でEHSの作動状態を判断し、EHSが作動しているとき、そのEHSの作動を解除させる制御を行ない、EHSの作動状態判断の際、EHSの動作条件を確認して動作条件であるかを判断する動作条件判断段階、及びEHSの動作条件を満たす場合、EHSが作動して制動力が設定されているかを確認する制動力確認段階を行う。
(もっと読む)
車両の停止制御装置
【課題】自動的に停止・再始動される内燃機関と、内燃機関の停止中に車両を自動的に制動する制動装置を有する場合において、それらを適切に制御することにより、車両の円滑な発進と燃費の向上を実現できる車両の停止制御装置を提供する。
【解決手段】車両Vは、アイドルストップが行われるエンジン3と、アイドルストップ中に作動し、車両Vを制動するパーキングブレーキ60を有している。停止制御装置1によれば、アイドルストップ中に検出された路面の勾配に応じて、再始動時目標回転数NECMDRSTおよびブレーキ解除時間TBRKOFFを設定し、エンジン3が再始動される際に、エンジン回転数NEが再始動時目標回転数NECMDRSTになるようにエンジン3の出力を制御するとともに、再始動時制御の開始時から解除終了時間TBRKOFFが経過したときに、パーキングブレーキ60による制動を解除する。
(もっと読む)
電動乗物用のAC駆動システム
【課題】実用的な乗物用の駆動システムを提供する。
【解決手段】この駆動システムは、駆動トルクを提供するための交流(AC)モータを含んでいる。ACモータコントローラは、電源電圧信号、スロットルペダル位置信号、ブレーキペダル位置信号、キースイッチ信号、前進/ニュートラル/後退(FNR)信号、および、実用的な乗物が駆動するように設定されているか、牽引されるように設定されているかを示す走行/牽引信号を受信する。ACモータコントローラは、ACモータのためのAC駆動信号を生成し、AC駆動信号は、電源電圧信号、スロットルペダル位置信号、ブレーキペダル位置信号、キースイッチ信号、FNR信号、および走行/牽引信号に基づいている。
(もっと読む)
車両制御装置及び車両制御方法
【課題】自動ブレーキの作動により停止した車両を、長時間に亘って停止させ続けることが可能な車両制御装置、車両制御方法を提供する。
【解決手段】車両に衝突が発生した際に、ブレーキ16を作動させて車両を自動停止させる。そして、車両が停止した場合には、シフトポジションアクチュエータ17の制御により、シフトポジションをパーキングに切り替える。従って、無理なく車両の停止状態を継続させることが可能となり、車両が再度動き出すことを防止することができる。
(もっと読む)
車両保持制御装置及び車両保持制御方法
【課題】モータの電力消費量を最小限に抑えることができる車両保持制御装置及び車両保持制御方法の提供。
【解決手段】車両の登坂状態が検出され、かつブレーキペダル17のオフ状態を検出した際に、ブレーキ油圧を保持した後に、徐々に解放する油圧ヒルホールド手段と、走行駆動力を供給可能なフロントモータ4、リヤモータ6と、各モータの駆動力を制御するモータECU11,12とを備えた車両保持制御装置であって、登坂状態の車両1のずり下がりを防止するのに必要な必要車両保持力を路面勾配と車両重量に基づいて導出するエンジンECU13を備え、モータECU11,12は、油圧ヒルホールド手段により徐々に油圧が解放されて減少する車両保持力が、エンジンECU13により導出された必要車両保持力以下になるときに、不足した車両保持力をフロントモータ4やリヤモータ6のトルクで補う。
(もっと読む)
パーキングロック装置
【課題】車両の停止状態を保持するようにパーキングロック機構が作動した後に、ブレーキ装置の操作を解除しても予期しない車両の揺動の発生を防止することが可能なパーキングロック装置を提供することを目的とする。
【解決手段】パーキングロック条件が満たされた場合に、Pレンジ成立装置31がパーキングロック機構14をロック状態とする前に、傾斜方向検出装置95で検出された傾斜方向と車両の停止時に自動変速機1によって成立されている走行レンジとに基づいて、車両が路面の傾斜を下る方向に走行する状態から停止したことを検出すると、車両が路面の傾斜を上る方向の走行レンジを自動変速機1に一旦成立させた後に、Pレンジ成立装置31にパーキングロック機構14をロック状態にさせてPレンジを成立させるパーキングロック制御装置32と、を備えるパーキングロック装置。
(もっと読む)
動力車両の制動制御装置
【課題】機体停止操作時にもクラッチペダルの踏み込みを行わずともエンジン停止のない作業車両を得ようとする。
【解決手段】エンジン5からの回転動力を変速装置11,12を介して車軸50に伝達し、該車軸50にはブレーキ51を備えた作業車両であって、変速装置11,12の前段又は後段にエンジン動力または変速動力を入り切りする主クラッチ手段38,39を備え、ブレーキ51L,51Rを連動するブレーキペダル94L,94Rの踏込み操作に基づき前記クラッチ手段38,39をクラッチ切り状態に連動し、車体1の車体走行速度を検出する車速検出センサ54を設け、前記ブレーキペダル94L,94Rの操作後、車体走行速度Vが予め設定した設定速度Vs以下を検出すると、前記ブレーキ51L,51Rを制動する制動アクチュエータ95LC,95RCに作動出力する制御部70を設ける。
(もっと読む)
電動車両のブレーキ制御装置
【課題】回生協調ブレーキ制御時、マスターシリンダ圧発生開始ポイントのメカバラツキ影響を排除した制動目標値を設定することにより、良好なブレーキフィーリングと回生エネルギーの確保を達成すること。
【解決手段】ハイブリッド車のブレーキ制御装置は、マスターシリンダ13と、ホイールシリンダ4FL,4FR,4RL,4RRと、VDCブレーキ液圧ユニット2と、モータコントローラ8と、統合コントローラ9と、を備える。統合コントローラ9は、ブレーキ操作時、目標減速度を基本液圧分と上乗せ制動分(回生分と加圧分)で達成する回生協調ブレーキ制御を行う。そして、ブレーキ操作によりマスターシリンダ圧の発生が開始されるブレーキペダルストローク位置を検出し、検出された実マスターシリンダ圧発生開始ポイントでの目標減速度が、上乗せ制動分の最大値(回生ギャップ)になるように、ストローク変化に対して滑らかに変化する目標減速度特性を設定する(図4)。
(もっと読む)
ブレーキ装置
【課題】ペダルフィーリングの良好なブレーキ装置を提供する。
【解決手段】本ブレーキ装置のコントローラは、HSA制御の作動中、ブレーキペダルの操作を検出したときに、電動モータに対して、ブレーキペダルの操作量に対応した液圧を保持するように制御する。これにより、HSA制御中にブレーキペダルが踏み込まれた際、運転者の意図に沿ったペダルフィーリングを得ることができる。
(もっと読む)
車両停止保持装置
【課題】パーキングロック機構のロック状態を解除した時に、車両の予期せぬ移動を防止する車両停止保持装置の提供。
【解決手段】車両が所定の条件を満足した時、コントローラ3は車両が停止状態にあると判断し、シフト機構13によってシャフトロック機構14を作動させ、自動変速機1のアウトプットシャフト11を機械的にロックし、車両を停止状態で保持する。シャフトロック機構14によって、車両が停止保持された状態にある場合において、運転者がアクセルペダル97を操作すると、コントローラ3はシャフトロック機構14によるアウトプットシャフト11のロックを解除するとともに、ブレーキECU5に対して加圧要求を発する。加圧要求を受けたブレーキECU5は、液圧ブレーキ装置6を作動させて、ブレーキペダルの操作に拘わらず、ブレーキ液圧をホイルシリンダに供給する。
(もっと読む)
電動車両の発進時ずり下がり防止制御装置
【課題】充電制限により回生制動が得られなくても、車両のずり下がりを確実に防止し得る装置を提供する。
【解決手段】充電制限中のDレンジ停車状態で瞬時t1以降、アクセル開度APO(モータトルクTTMA0)を増大させて行う発進操作中(当初はモータトルク指令値TTMA=TTMA0)、車両速度VSP≦-0.5km/hが0.1sec継続するt2に、ずり下がり防止制御を開始(flag_RSAON=1)。一方でTTMAを一定変化率β1で低下させt3に0となし、他方でブレーキトルク指令値TTBRK(ブレーキ液圧指令値TPMC)を一定変化率α1で、TTMA0と同じトルク値となるよう増大させ、摩擦制動により、ずり下がりを防止する。VSP=0が0.1sec継続する、ずり下がり防止完了時t5より、TTMAを一定変化率β2でTTMA0に復帰させ、TTBRK(TPMC)を一定変化率α2(=-β2)で0へ低下させる。
(もっと読む)
車両の制御装置
【課題】 クラッチの耐久性を向上しつつ運転性を確保可能な車両の制御装置を提供すること。
【解決手段】 アクセルヒルホールドと判定され、かつ、勾配路に応じた所定時間が経過したときは、ブレーキ制御手段を用いて車輪に機械的制動トルクを付与すると共に、クラッチの締結トルクを低下させる締結要素保護制御を実施することとした。
(もっと読む)
車両の坂道発進補助装置
【課題】坂道発進補助制御により一旦停止で制動状態に保持した車両を特別な操作を要することなく制動解除してクリープ走行を開始でき、もってクリープ現象の利点を十分に活かすことができる車両の坂道発進補助装置を提供する。
【解決手段】車両の一旦停止時にアイドルストップ制御によりエンジンを停止させると共に(S6)、坂道発進補助制御により車両を制動状態に保持し(S8)、その後に運転者による車両発進の意志表示に基づきアイドルストストップ制御によりエンジンを始動し(S12,14)、それに伴うクラッチ装置の半クラッチ制御の再開によりクリープトルクが増加して制動解除判定値に達すると、車両の制動を解除する(S16,18)。
(もっと読む)
エンジン自動停止再始動制御装置
【課題】エンジン再始動時の車体の前後方向の振動をより抑制することができるエンジン自動停止再始動制御装置を提供する。
【解決手段】エンジン再始動を行う際に、ショック抑制ブレーキ制御を行い、実車軸トルク変化速度と理想車軸トルク変化速度との間の差である変化速度差に応じた制動トルクを発生させる。これにより、エンジン再始動時に生じる振動トルクを抑制することが可能となり、車体のショックを抑制することが可能となる。
(もっと読む)
1 - 20 / 83
[ Back to top ]