
Fターム[3D246HA86]の内容
ブレーキシステム(制動力調整) (55,256) | 検知、推定情報−車両情報 (14,591) | 車体状態 (4,109) | 車体速度 (1,392)
Fターム[3D246HA86]の下位に属するFターム
1つ又は複数の車輪速より演算 (252)
対地速度 (7)
停止状態 (83)
横すべり速度 (11)
Fターム[3D246HA86]に分類される特許
121 - 140 / 1,039
二輪車用車両制御装置及びその方法
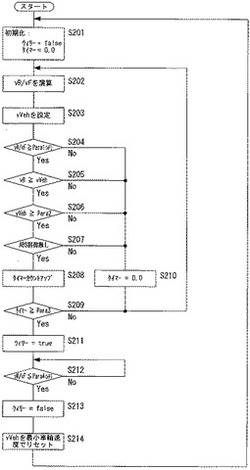
【課題】本発明は、低速走行時においてより正確にウィリー走行の開始及び終了を検知することができる二輪車用車両制御装置の提供を目的とする。
【解決手段】自動二輪車のブレーキの制御を行う二輪車用車両制御装置において、ECUは、前後輪の速度比(vR/vF)を用いてウィリー状態を判定する(ステップS204、S212)。
(もっと読む)
トラクションコントロール装置

【課題】車両速度の推定にあたり、実際の車両速度との誤差が生じた場合であっても、適切に制御することができるトラクションコントロール装置を提供すること。
【解決手段】車両速度推定装置及び駆動力制御装置を備えたトラクションコントロール装置は、駆動力制御装置を構成し、回転速度検出手段で検出された回転速度から各車輪のスリップ率を算出して、算出されたスリップ率が一定の目標値に収束するように、制動機構の制御を行う制動機構制御手段84と、車両速度推定装置で推定された建設車両の車両速度、及び、制動機構制御手段84で算出されたスリップ率に基づいて、駆動力制御装置による駆動力制御のバランス状態の適否を判定する車両状態判定手段815と、バランス状態が不適であると判定されたら、駆動力制御装置による駆動力制御の状態を変更する駆動力制御変更手段816とを備えている。
(もっと読む)
パーキングロック装置
【課題】車両の停止状態を保持するようにパーキングロック機構が作動した後に、ブレーキ装置の操作を解除しても予期しない車両の揺動の発生を防止することが可能なパーキングロック装置を提供することを目的とする。
【解決手段】パーキングロック条件が満たされた場合に、Pレンジ成立装置31がパーキングロック機構14をロック状態とする前に、傾斜方向検出装置95で検出された傾斜方向と車両の停止時に自動変速機1によって成立されている走行レンジとに基づいて、車両が路面の傾斜を下る方向に走行する状態から停止したことを検出すると、車両が路面の傾斜を上る方向の走行レンジを自動変速機1に一旦成立させた後に、Pレンジ成立装置31にパーキングロック機構14をロック状態にさせてPレンジを成立させるパーキングロック制御装置32と、を備えるパーキングロック装置。
(もっと読む)
電動車両のブレーキ制御装置
【課題】回生協調ブレーキ制御中にABS制御が介入したとき、制御干渉の防止と、制御再介入の頻度抑制と、回生エネルギー量確保の実効と、を併せて達成すること。
【解決手段】ハイブリッド車のブレーキ制御装置は、液圧制動手段であるブレーキ液圧発生装置1と、回生量制御手段であるモータコントローラ8と、回生協調ブレーキ制御手段である統合コントローラ9と、ABS制御手段であるブレーキコントローラ7と、を備える。統合コントローラ9は、回生協調ブレーキ制御中にABS制御が介入したとき、ABS制御介入中は回生制動要求を停止し、ABS制御が非作動状態へ移行すると、前回のABS制御介入時の回生量を超えない値に制限した回生量を今回の回生量リミッタとする制限付き回生制動要求による回生協調ブレーキ制御に復帰するABS介入時回生協調ブレーキ制御を行う(図3)。
(もっと読む)
車両の走行制御装置
【課題】交差点無停止走行制御による後続車両との車間距離の短縮を抑制し、適正な車間距離を維持できるようにする。
【解決手段】後続車両の情報を取得し、後続車両があると判定されたときは、自車両を交差点無停止走行制御において要求される減速度G1で減速走行した場合に、後続車両が適正な車間距離を維持するのに必要な減速度Gr1を算出し、減速度Gr1が急減速となる設定減速度G0以上である場合は、交差点無停止走行制御を回避して元の目標車速V0で走行制御し、減速度Gr1が設定減速度G0未満のときに、目標車速V2として減速度G1で減速する交差点無停止走行制御を実行する。
(もっと読む)
運転支援装置
【課題】位置制御フィードバックが不要な自動ブレーキにより安価に高い距離精度で自車両を障害物の手前に停止する。
【解決手段】演算処理部4により、自動ブレーキの開始指令のタイミングから自車両1に実際に自動ブレーキのブレーキ力が付与されるまでの実効遅れ時間を設定し、自動ブレーキで自車両1の減速度が目標減速度に対応して実際に到達する実効減速度に到達するまでの過渡時間を算出し、前記実効減速度の減速で自車両1が停車するまでの減速停止時間を算出する。さらに、それらの時間を含む制動時間に自車両の停止位置を障害物の所定距離手前の位置に設定する前出し時間を加えた時間を自動ブレーキの所要時間として算出し、衝突予測時間が所要時間になる自動ブレーキの開始指令タイミングから自動ブレーキを開始し、障害物より前記前出し時間に基づく障害物の所定距離手前の位置に自車両1を自動停止する。
(もっと読む)
車両の統合制御装置
【課題】多機能化するブレーキシステムのそれぞれの機能を適切に調停し、ドライバの信頼性を高め、安全性を向上する。
【解決手段】ブレーキ制御ユニット30は、横すべり防止制御の機能とコーナリング制動制御の機能と車線逸脱防止ヨーモーメント制御の機能と車線逸脱減速制御の機能と追従走行制御の機能の5つの機能を有しており、車両のヨーモーメントを制御する横すべり防止制御の機能とコーナリング制動制御の機能と車線逸脱防止ヨーモーメント制御の機能は、横すべり防止制御の機能を最優先で実行し、次に、コーナリング制動制御の機能を優先して実行し、次いで、車線逸脱防止ヨーモーメント制御の機能を実行する。また、車両を減速制御する車線逸脱減速制御の機能と追従走行制御の機能は、減速指示値の大きい方の減速指示値を出力する。
(もっと読む)
車両用制御装置
【課題】車両発進直後のブレーキ操作時には既に錆取りが行われていることを保証すること。
【解決手段】車両の主電源(イグニッションスイッチ43)オン時に、ディスクロータ15の摩擦面15Aの発錆が検出されている場合には、摩擦制動手段19が摩擦制動力を発生する制御を行う。
(もっと読む)
車両の自動制動装置
【課題】ドライバによる操縦の意思を反映しながら、自動制動のオーバーライド制御を行う車両の自動制動装置を提供する。
【解決手段】車両の制動機構を自動で駆動する駆動手段11,13と、車両前方の障害物を検知する前方障害物検知手段2と、車両の運転のためにドライバにより操作されるドライバ操作手段の操作状態を検出するドライバ操作検出手段4〜6と、駆動手段の作動を制御する制御手段1とを備え、制御手段1は、車両が障害物と衝突するかを予測する衝突予測手段22と、該操作が適正な衝突回避操作か誤操作かを判定する操作判定手段23と、操作判定手段によって操作が適正な衝突回避操作であると判定されると駆動手段を非作動とし、ドライバ操作検出手段によって操作状態が検出されない若しくは且つ操作状態が検出されたが操作判定手段によって操作が誤操作であると判定されると駆動手段を作動させる作動指令手段24とを有している。
(もっと読む)
車両運動制御システム
【課題】車両安定性の低下を簡易に予測できる車両運動制御システムを提供すること。
【解決手段】この車両運動制御システム1は、車輪速度、車体速度、前後加速度および横加速度、実ヨーレート、操舵角、アクセル開度、ブレーキ踏力など車両状態量に基づいて、耐ロールオーバー制御、US/OS抑制制御などの車両運動制御を行う制御装置5を備えている。また、制御装置5は、現在の車両状態量と、車両状態量の履歴および車両運動制御の実施履歴を含む過去の制御履歴とに基づいて、将来的な車両安定性の低下を予測する安定性低下予測部53を有している。
(もっと読む)
車両停止補助装置
【課題】 簡単な装置構成により車両の停止状態を維持し、かつ停止状態から発進するときのシフトショックを低減する車両停止補助装置を提供する。
【解決手段】 車両に搭載される車両停止補助装置では、車両速度が0であり(S101)、かつパーキングブレーキが解除されており(S102)、かつブレーキ圧がブレーキ閾値以上であり(S103)、かつアクセル開度が第1閾値以下である場合(S104)、ECUは自動変速機のクラッチを係合し、車両の停止状態を維持する準Pレンジに機械シフトレンジを切り換える(S106)。その後、エンジンを停止するアイドリングストップを実行する(S107)。エンジン停止後、運転者が操作するアクセル開度が第1閾値より小さい第2閾値以上になる(S108)とエンジンは再始動する。運転者が操作するアクセル開度が第1閾値以上になる(S110)とECUは機械シフトレンジをDレンジに変更する。
(もっと読む)
車両
【課題】介助者の意図に反して移動することを防止できる車両を提供する。
【解決手段】車両10は、後輪16a,16b、クラッチユニット50、スプロケット52、クランク70、およびスイッチユニット106を備える。スプロケット52は、クラッチユニット50のかみ合い部材132に連結される。クランク70の回転力は、スプロケット52およびクラッチユニット50を介して後輪16bに伝達される。介助者がスイッチユニット106の第1操作部材108を操作することによって、スプロケット52とかみ合い部材132との連結が解除される。これにより、クランク70から後輪16bへの回転力の伝達が遮断される。また、スプロケット52からかみ合い部材132に与えられる力が大きくなることによってもスプロケット52とかみ合い部材132との連結が解除される。
(もっと読む)
車両の挙動制御装置
【課題】各種状態制御量の制御を介して最終的に車両状態量を制御する各種のデバイスが故障した場合において、故障したデバイスに対応する状態制御量を中立点に復帰させるまでの過渡的過程における車両挙動を安定に維持する。
【解決手段】車両の挙動制御装置(100)は、ドライバによる操舵とは無関係に前輪の舵角を変化させることが可能な前輪舵角可変手段及びドライバによる操舵とは無関係に後輪の舵角を変化させることが可能な後輪舵角可変手段のうち一方が異常状態にあるか否かを判定する判定手段と、一方が異常状態にあると判定された場合に、この一方に対応する異常側車輪の舵角を中立点に戻す舵角戻し手段と、異常側車輪の舵角を中立点に戻す過程において、異常側車輪の舵角の戻し量に応じて、異常状態にない他方に対応する正常側車輪の舵角と左右制駆動力差とを制御する制御手段とを具備する。
(もっと読む)
動力車両の制動制御装置
【課題】機体停止操作時にもクラッチペダルの踏み込みを行わずともエンジン停止のない作業車両を得ようとする。
【解決手段】エンジン5からの回転動力を変速装置11,12を介して車軸50に伝達し、該車軸50にはブレーキ51を備えた作業車両であって、変速装置11,12の前段又は後段にエンジン動力または変速動力を入り切りする主クラッチ手段38,39を備え、ブレーキ51L,51Rを連動するブレーキペダル94L,94Rの踏込み操作に基づき前記クラッチ手段38,39をクラッチ切り状態に連動し、車体1の車体走行速度を検出する車速検出センサ54を設け、前記ブレーキペダル94L,94Rの操作後、車体走行速度Vが予め設定した設定速度Vs以下を検出すると、前記ブレーキ51L,51Rを制動する制動アクチュエータ95LC,95RCに作動出力する制御部70を設ける。
(もっと読む)
車両の制御装置
【課題】運転者に煩わしさを与える接触回避処理がなされることを抑制した車両の制御装置を提供する。
【解決手段】接触回避制御部17は、物体認識部11により認識された物体2の移動速度がVthを超えているときは、自車両1と物体2との距離がL以下になったときに、接触回避処理を実行し、物体2の移動速度がVth以下であって自車両1と物体2との距離がL以下になったときには、自車両1の将来進路60,61と物体2との間隔が所定間隔以上であるか否かを判断し、該間隔が該所定間隔以上であるときは、接触回避処理を実行しない。
(もっと読む)
差圧制御弁
【課題】可動子の移動に伴う吸引力の変化を抑制して、高精度の圧力制御を行なうことができる差圧制御弁を提供すること。
【解決手段】差圧制御弁1は、ソレノイド2によって駆動されるプランジャ3と、プランジャ3を摺動可能に保持するスリーブ4と、プランジャ3の移動に伴って移動する制御ピストン6と、制御ピストン6を摺動可能に保持するガイド7とを備えている。また、磁気ショート構造として、制御ピストン6を押圧可能な円柱状の凸部21と凸部21と嵌合可能な円柱状に凹部22が設けられている。更に、プランジャ3の動作により作動する制御ピストン6は、弁座12に設けられた孔を閉鎖することでブレーキ液の流路を閉ざす円錐状のニードルを備えている。この制御ピストン6のニードル先端部6cの形状として、先端を平坦に(軸方向と垂直に)カットしている。これにより、開弁時の圧損を低減できる。
(もっと読む)
車両挙動制御装置
【課題】複数の車両挙動制御装置のうち一の装置が故障した場合に、車両挙動の乱れを抑制しつつ他の装置へ切り替える。
【解決手段】車両挙動制御装置は、車両(10)の複数の車両挙動制御手段(400、500、600、800)から2以上を選択して車両の挙動を制御する挙動制御実行手段(100)と、選択された車両挙動制御手段のうち少なくとも一つの車両挙動制御手段が故障したか否かを判定する判定手段(100)と、故障したと判定された場合、故障したと判定された車両挙動制御手段と切り替え可能な予備挙動制御手段を選択する選択手段(100)と、予備挙動制御手段を用いた場合に、選択された車両挙動制御手段に係る制御量の変化量を演算する演算手段(100)と、演算された変化量に基づいて、故障したと判定された車両挙動制御手段と切り替えるべき予備挙動制御手段を決定する決定手段(100)と、を備える。
(もっと読む)
車両用制動力制御装置
【課題】制動装置の失陥の有無を正確に判定すると共に、失陥があるときには余分なヨーモーメントの増大や車両の減速度の低下が抑制されるよう後輪の制動力を制御する。
【解決手段】ダイヤゴナル二系統の制動装置を有し、制動時に前輪に対する左右後輪の車輪速度の関係が目標の関係になるよう左右後輪の制動圧を個別に制御することにより制動力の前後輪配分制御を行う制動力制御装置。一方の系統の一方の車輪と他方の系統の一方の車輪との間の車輪速度の差の大きさ、又は一方の系統の他方の車輪と他方の系統の他方の車輪との間の車輪速度の差の大きさが閾値を越えるか否かを判定する(S170、270)。越えるときには、左右後輪のうち車輪速度が高い方の車輪を含む系統が失陥していると判定し、他方の後輪について制動力の前後輪配分制御による制動圧の低減を行わない(S190、290)。
(もっと読む)
自動ブレーキ装置
【課題】自動ブレーキの不要な作動をより早い段階で抑制する。
【解決手段】ブレーキ機構2を作動させるアクチュエータ3と、アクチュエータ3の作動を制御する制御手段1とを備えた自動ブレーキ装置において、車両の前方を走行する先行車両の情報を検出する車両前方情報検出手段4,5と、前方情報に基づき車両と先行車両とが衝突する可能性を予測する衝突予測手段1aと、前方情報に基づき、先行車両が車両の走行領域から外れるか否かを予測する先行車両走行予測手段1bと、車両と先行車両とが衝突を回避できるか否かを判定する衝突回避判定手段1cと、を備える。制御手段1は、衝突予測手段1aにより衝突可能性があると予測されたら、衝突回避判定手段1cにより衝突を回避できると判定されない限りアクチュエータ3を作動させ、衝突を回避できると判定されたら、アクチュエータ3を非作動にする。
(もっと読む)
車両用情報処理装置
【課題】ドライバーに違和感を与えることを防止することが可能な車両用情報処理装置を提供する。
【解決手段】車両のドライバーの過去の減速操作の記録に基づいてドライバーに車両を減速させるための情報提示が行なわれるように情報処理を行なう運転支援装置10のECU30は、所定地点から一定範囲内におけるドライバーの過去の減速操作における減速開始地点と、ドライバーの情報提示から減速操作までの反応時間とを基準として、車両を減速させるための情報提示が行なわれるように情報処理を行なう。このため、ドライバーの過去の減速操作における減速開始地点に応じて車両を減速させるための情報提示が行なわれる場合に、ドライバーの反応時間に応じて車両を減速させるための情報提示が行なわれることになり、ドライバーに違和感を与えることを防止することができる。
(もっと読む)
121 - 140 / 1,039
[ Back to top ]