
Fターム[3D246HA86]の内容
ブレーキシステム(制動力調整) (55,256) | 検知、推定情報−車両情報 (14,591) | 車体状態 (4,109) | 車体速度 (1,392)
Fターム[3D246HA86]の下位に属するFターム
1つ又は複数の車輪速より演算 (252)
対地速度 (7)
停止状態 (83)
横すべり速度 (11)
Fターム[3D246HA86]に分類される特許
41 - 60 / 1,039
制動力制御装置
【課題】路面推定の精度を向上させることが可能な制動力制御装置を提供する。
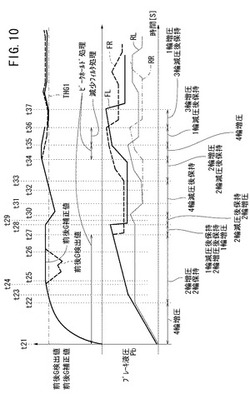
【解決手段】制動力制御装置12では、前後Gセンサ42が検出した車両10の前後加速度である前後G検出値に基づいて路面推定を行う路面推定手段110と、ホイールシリンダ62a〜62dにかかるブレーキ液圧を増圧、減圧又は保持させることで、車輪18のロックを防止するアンチロック制御手段112とを備える。路面推定手段110は、アンチロック制御中に前記ブレーキ液圧が増圧又は増圧保持となっている車輪18の数に応じて前記前後G検出値を補正した前後G補正値に基づいて路面推定を行う。
(もっと読む)
電動パーキングブレーキ装置

【課題】通常の使用時においての解除時間が長くなく、走行中の電動パーキングブレーキを作動させた場合においても確実に解除できる電動パーキングブレーキ装置を提供すること。
【解決手段】ステップS1において、パーキングブレーキを作動させる場合には、ステップS2に移行してアクチュエータを作動させる。ストロークセンサからの測定されたストローク値を制御部が取り込んで記憶部に作動ストローク値として記憶する。ステップS3において、作動時の車両の車速が0km/hか、あるいは車速が0km/hより大きいかを車速センサからの信号により車速判断部が判断をする。車両が走行していると判断した場合には、ステップS5に移行し、制御部はパーキングブレーキを解除させるための解除ストローク目標値を、実際の作動ストローク値の値として解除制御する。
(もっと読む)
車両制御装置、車両制御プログラム、および車両制御方法
【課題】車両の運動状態を制御する車両制御装置において、より車両の安定性を向上させることができるようにする。
【解決手段】車両制御システムにおいては、外部力推定部40としての機能を利用して、当該車両の走行に伴って外部から受ける力を表す路面反力、路面の摩擦抵抗、車輪荷重、上下方向反力等の外部力を推定し、タイヤモデル制御部51、サスアームモデル制御部52、スプリング&ダンパモデル制御部53としての機能を利用して、駆動トルク、操舵力、ブレーキ油圧、および外部力に基づいて、制御対象部の運動状態を示す速度や加速度等のパラメータを推定する。そして、各モデル制御部51〜53としての機能を利用して、パラメータが予め設定された目標範囲内になるように、駆動トルク、操舵力、ブレーキ油圧等を補正する。
(もっと読む)
車両用の電動式ブレーキ装置
【課題】車両用の電動式ブレーキ装置において、電気モータの長寿命化を図る。
【解決手段】車両用の電動式ブレーキ装置は、アクセルペダルが操作量減少側に移動している際の速度であるアクセル減少速度を検出するアクセル減少速度検出手段(ステップ108)と、アクセル減少速度検出手段により検出されているアクセル減少速度が小さいほど電気モータに小さな電流を通電して、ブレーキ操作部材が操作される前に制動部材と被制動部材との隙間を第1隙間所定値になるまで小さくするモータ制御手段(ステップ108〜112,124)と、を備えている。
(もっと読む)
車両の停止制御装置
【課題】自動的に停止・再始動される内燃機関と、内燃機関の停止中に車両を自動的に制動する制動装置を有する場合において、それらを適切に制御することにより、車両の円滑な発進と燃費の向上を実現できる車両の停止制御装置を提供する。
【解決手段】車両Vは、アイドルストップが行われるエンジン3と、アイドルストップ中に作動し、車両Vを制動するパーキングブレーキ60を有している。停止制御装置1によれば、アイドルストップ中に検出された路面の勾配に応じて、再始動時目標回転数NECMDRSTおよびブレーキ解除時間TBRKOFFを設定し、エンジン3が再始動される際に、エンジン回転数NEが再始動時目標回転数NECMDRSTになるようにエンジン3の出力を制御するとともに、再始動時制御の開始時から解除終了時間TBRKOFFが経過したときに、パーキングブレーキ60による制動を解除する。
(もっと読む)
車両の回生ブレーキ制御装置
【課題】比較的高速から低速まで一定の踏み込み量のブレーキペダル操作で減速をしても違和感の無い減速を可能とし、ABS作動時の減速感の途切れを抑えて運転者の不安感を解消することができる車両の回生ブレーキ制御装置を提供すること。
【解決手段】ABS装置と液圧ブレーキ及び回生ブレーキを備えた車両の液圧ブレーキによって発生する液圧制動力と回生ブレーキによって発生する回生制動力をABSの動作と車速に応じて制御して運転者が要求する制動力を得るとともに、回生ブレーキは、アクセルペダルの開放状態が検知されると「アクセルOFF回生制動力」を発生させ、ブレーキペダルの踏み込み操作が検知されると「ブレーキON回生制動力」を発生させ、ABS作動時に前記回生制動力をABS非作動時のそれよりも下げるよう制御する車両の回生ブレーキ制御装置において、回生制動力の低車速域の値が高車速域の値よりも大きくなるよう制御する。
(もっと読む)
車両トレーラに接続される牽引車を制御する方法及びシステム
【課題】トレーラを牽引する牽引車を制御するための、改善された方法及びシステムを提供する。
【解決手段】車両トレーラ102に接続されている牽引車100を制御する方法、及び当該方法を使用するシステム。本方法は、車両目標のセット及び当該車両目標のセットに応答する車両状態のセットを検知することを含む。本方法は、車両目標のセットと車両状態のセットとの間の複数の差を求めること、当該複数の差の傾向を求めること、当該傾向に基づいて対称信号及び非対称信号のうちの少なくとも一方を生成すること、並びに、当該対称信号及び非対称信号のうちの少なくとも一方を用いて車両システムを作動させることも含む。
(もっと読む)
車両制御装置
【課題】大型化を回避しつつ音振性能を確保し、安価でありながら適切な回生協調制御を達成可能な車両制御装置を提供すること。
【解決手段】モータを駆動源とする車両において、制動時にモータによる回生制動力と油圧による摩擦制動力とを協調させる回生協調制動力の制御において、回生協調制御により回生制動力から摩擦制動力にすり替えるときは、設定したすり替え速度範囲において、ギヤポンプの能力や音振性能への影響を及ぼさない範囲で、各制動力の変化勾配を最大変化勾配より小さな所定勾配以下に制限することで所望の制動力を得るととした。
(もっと読む)
車両用制動力制御装置
【課題】車両がスプリットμ路を走行する際の前一輪のアンチスキッド制御に起因して車両に作用する余分なヨーモーメントを低減しつつ、従来の制動力制御装置の場合に比して後輪の横力が不足する虞れを低減する。
【解決手段】必要に応じて各車輪の制動力を相互に独立に制御可能な制動装置を有する車両用制動力制御装置に係る。一方の前輪に於いてアンチスキッド制御が開始され(ステップ150)、左右の路面の摩擦係数が異なる走行路に関し予め設定された条件が成立していると判定されると(ステップ200)、一方の前輪とは左右反対側の前輪の制動力の増大を抑制すると共に、左右の後輪のうち少なくとも一方の前輪とは左右反対側の後輪の制動力の増大を抑制する(ステップ500又は700)。一方の前輪とは左右反対側の前輪の制動力の増大抑制度合は後輪の制動力の増大の抑制が行われない場合の抑制度合に比して小さい。
(もっと読む)
車両運動制御装置
【課題】車両に横運動が発生していない状態においても、ドライバフィーリングよく車両を加減速する車両運動制御装置を提供する。
【解決手段】車両運動制御装置において、自車両前方のカーブ形状を取得するカーブ形状取得手段2と、自車両の位置を取得する自車位置取得手段3と、そのカーブ形状及びその自車両の位置に基づいて、車両に発生させる前後加速度指令値を演算する車両運動制御演算手段4と、を有し、車両運動制御演算手段4は、自車両がカーブ前からカーブ進入し、カーブ曲率が一定、もしくは最大になる地点まで走行する際に、複数の異なる負の前後加速度指令値を演算し、前記前後加速度指令値は、自車両前方のカーブ走行時に発生するであろう最大横加速度推定値、自車両前方の道路勾配、ドライバのペダル操作、旋回方向のうちの少なくともいずれか一つに基づいて変化する。
(もっと読む)
車両用減速度制御装置、車両用減速度制御方法
【課題】運転者のブレーキ操作を支援しつつ、減速度の変動を抑制する。
【解決手段】運転者がブレーキ操作を行ったときに、エンジンブレーキによる減速度をライズアップ率Rrで増加させる。そして、減速度をライズアップ率Rrで増加させてから予め定められた時間が経過したら、この時点の減速度から減速度をライズアップ率Rrよりも小さなビルドアップ率Rbで増加させる。また、エンジン被動側の動力伝達状態が、定常状態から低減し、その後、再び定常状態へと復帰したら、減速度の増加率を減少補正する。変速機の変速位置がDレンジからNレンジへ変化したことを検出したときに、動力伝達状態が定常状態から低減したと判断する。また、その後、変速位置がNレンジからDレンジへと復帰したことを検出したときに、再び定常状態へ復帰したと判断する。
(もっと読む)
車両制動装置
【課題】より快適なフィーリングを実現し、エネルギー効率の低下と燃費の悪化を招くことを防止することができる車両制動装置を提供すること。
【解決手段】車両制動装置は、選択スイッチにより車両制御手段2cの動作が選択されないで、減速指令がある場合に、減速指令により定まる制動要求減速度が所定減速度以下である場合、ポンプが基礎油圧又は操作油圧を増圧して制御油圧を発生させる増圧制動処理を実行しない制動処理手段5aを備えることを特徴とする。
(もっと読む)
車両状態検出装置
【課題】車両に設置されたカメラ20で撮像された画像データに基づいて、自車両の状態を検出する車両状態検出装置であって、その検出精度を向上させることを目的とする。
【解決手段】制御装置10(CPU11)は、カメラ20で撮像された複数の画像データを取得して、この複数の画像データの夫々において特徴点を抽出し、時間的に連続する画像データにおいて、特徴点の位置を追跡処理することによって複数のオプティカルフローを導出する(S10〜S30)。そして、導出された複数のオプティカルフローにおいて、方向と大きさの両方が同じであるオプティカルフロー同士を一つのグループに分類するとともに、オプティカルフローが最も多く含まれるグループのオプティカルフローを、自車両に対応する自車オプティカルフローとして選択し、選択された自車オプティカルフローに基づいて自車両の状態を検出する(S50〜S70)。
(もっと読む)
衝突危険度判定装置
【課題】衝突危険度を精度よく判定する。
【解決手段】衝突危険度判定装置100では、環境検出部5bにより移動物の位置分布及び移動状態分布を検出し、マップ生成部5cにより存在可能度マップを生成する。移動物生成部5d、位置更新部5e及び分布変更部5fにより、存在可能度マップ上にて移動物の将来位置分布を予測する。進路候補演算部5aにより、自車両10の進路候補を複数演算する。危険度候補演算部5hにより、存在可能度マップ上で複数の進路候補それぞれの衝突危険度候補を演算する。そして、危険度判定部5iにより、演算された複数の衝突危険度候補に基づき複数の進路候補のうち一の進路候補を選択し、選択した当該一の進路候補の衝突危険度候補を衝突危険度として判定する。ここで、危険度候補演算部5hは、移動コストと運動コストと衝突確率とに基づき衝突危険度候補を演算する。
(もっと読む)
車両運転支援装置
【課題】ドライバーの運転操作の経年的な衰えを検出し、検出した衰えに応じた車両運転の支援を行う。
【解決手段】ドライバーの年齢別およびブレーキ操作開始時の車速別に、車両のブレーキ操作開始から車両停止までの期間における、車両の減速挙動を表す減速挙動データ(制動距離、減速度の標準偏差)を、減速時学習データとして記録し、当該減速時学習データが記録された後、車両のブレーキ操作開始時(ステップ210)に、減速時学習データ中の最新の期間における減速挙動データのうち現在の車速に相当する減速挙動データと、学習データ中の最新よりも過去の期間における減速挙動データのうち現在の車速に相当する減速挙動データと、を比較し(ステップ220)、その比較結果に基づいて、ドライバーの運転能力が所定基準以上に衰えているか否かを判定し(ステップ230、240)、判定結果に応じて制動力を変化させる。
(もっと読む)
車両用運転操作支援装置
【課題】車両を減速させる運転操作支援の制御において違和感が生じることなく運転操作支援を行う。
【解決手段】ナビゲーション装置3からの道路情報に基づいて進路上にカーブが有る場合に、カーブ開始位置の目標地点の目標速度まで減速させるための高低2つの減速ラインを設定し、車速の高低に応じていずれか一方の減速ラインで減速させるために車速が減速ラインを超えていたらナビゲーション装置や画面表示可能な装置で減速の表示を行い、さらにアクセル反力を発生させたり、ブレーキによる制動を行ったりし、かつ目標地点近傍にそれらの制御を解除する不感帯を設ける。目標地点に近付いて複数の減速ライン間が狭まることにより、隣接する減速ラインを交互に制御の基準として異なる種類の制御が行われることによる運転者に与えてしまう違和感を防止し得る。
(もっと読む)
隊列走行制御装置
【課題】製造コストの増加を抑えつつ、先頭車両におけるフルブレーキ制動時の隊列走行の安定化を図ることができる隊列走行制御装置を提供することを目的としている。
【解決手段】手動又は自動運転される先頭車両1aに後続車両1bを自動追従させる隊列走行制御装置において、前走車両1aにおけるブレーキチャンバ32に加圧される最大エア圧よりも、自車両1bにおけるブレーキチャンバ32に加圧される最大エア圧を高い値に設定する調圧弁(比例制御弁)34aと、調圧弁34aを迂回するバイパス通路34eと、を備えたエアブレーキ手段(エアブレーキシステム)20a,20bと、隊列走行時、調圧弁34aを介してエアをブレーキチャンバ32に供給し、非隊列走行時、バイパス通路34eを介してエアをブレーキチャンバ32に供給するように切り替える隊列走行制御手段(統合コントローラ)10と、を備えた。
(もっと読む)
制駆動力制御装置および制駆動力制御方法
【課題】制振のための制駆動力制御を行う際に、制御介入時の動作をより適切なものとすること。
【解決手段】車両における制駆動状態に基づいて、車両に働く荷重を安定化させるための荷重安定化制駆動力指令値を算出する荷重安定化制駆動力指令値算出手段と、車両における操舵状態に基づいて、車両の荷重を付加するための荷重付加制駆動力指令値を算出する荷重付加制駆動力指令値算出手段と、車両の走行状況に基づいて、走行環境の安定度合いを示す荷重安定化指標を算出する荷重安定化指標算出手段と、操舵入力に基づいて、操舵操作の安定度合いを示す荷重付加指標を算出する荷重付加指標算出手段と、荷重安定化制駆動力指令値と、荷重付加制駆動力指令値と、荷重安定化指標と、荷重付加指標とに基づいて、制駆動力制御手段による制駆動力の付与状態を制御するトルク制御手段とを有する制駆動力制御装置とした。
(もっと読む)
ブレーキ制御装置
【課題】サービスブレーキ力から駐車ブレーキ力への切替え時に、EPBの加圧機構を作動させることによる車両のサービスブレーキ力の低下を抑制する。
【解決手段】後輪系においてサービスブレーキ1とEPB2とが一体型とされた駐車ブレーキ一体型加圧機構を採用しており、かつ、X配管の車両用ブレーキシステムにおいて、サービスブレーキ力から駐車ブレーキ力への切替えを行う際に、両前輪の増圧制御弁34、44を遮断状態にして前輪ブレーキ力を保持する。これにより、駐車ブレーキ力への切替えを開始したときに、後輪ブレーキ力が低下しても、前輪ブレーキ力については低下しないようにできる。このため、サービスブレーキ力と駐車ブレーキ力を合計した車両全体のブレーキ力が低下することによる車両振動を抑制できるし、停車可能なブレーキ力よりも低下しないようにでき、坂路において車両のずり下がりが発生しないようにすることが可能となる。
(もっと読む)
車両用ブレーキ液圧制御装置
【課題】ペダルフィーリングの悪化を抑えつつ、入口弁(常開型比例電磁弁)のハンチングを抑えることを目的とする。
【解決手段】制御部は、常開型比例電磁弁の通電量を第1勾配で減少させる際に、通電量を増加側にオフセットするオフセット制御を実行するオフセット手段を有し、オフセット手段は、電流検出手段で検出された電流値が所定の変動状態となるか否かを判定し(ステップS5)、所定の変動状態となる場合に(Yes)、オフセット制御を実行する(ステップS6)。
(もっと読む)
41 - 60 / 1,039
[ Back to top ]