
Fターム[3D246HA86]の内容
ブレーキシステム(制動力調整) (55,256) | 検知、推定情報−車両情報 (14,591) | 車体状態 (4,109) | 車体速度 (1,392)
Fターム[3D246HA86]の下位に属するFターム
1つ又は複数の車輪速より演算 (252)
対地速度 (7)
停止状態 (83)
横すべり速度 (11)
Fターム[3D246HA86]に分類される特許
201 - 220 / 1,039
車両用情報処理装置
【課題】 要減速地点におけるドライバの運転嗜好に応じた減速等操作開始位置を決定することができる車両用情報処理装置を提供する。
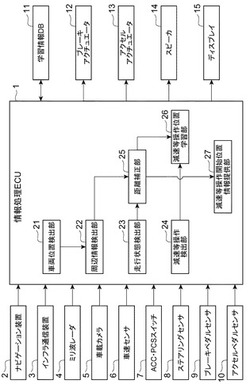
【解決手段】 車両用情報処理装置は、要減速地点の地図情報を記憶する地図情報記憶手段と、車両の位置を検出する車両位置検出部21と、車両の減速等操作を検出する減速等操作検出部24と、要減速地点の手前位置であって、減速等操作が行われた位置を学習する減速等操作位置学習部26と、を備え、減速等操作位置学習部26は、減速等操作が行われた位置の要減速地点からの離間距離に対応付けて、減速等操作を学習する。
(もっと読む)
車両のブレーキ保持力制御装置

【課題】車両が停止している路面の勾配と自動変速機の油圧状態に応じてブレーキ力の保持を開放するタイミングを変更することによって車両の違和感の無いスムーズな発進を可能とする車両のブレーキ力保持制御装置を提供すること。
【解決手段】油圧で駆動される自動変速機4を備え、ブレーキ装置7のマスタシリンダ11とホイールシリンダ12とを連通させる液圧通路13に設けられた電磁弁14によってマスタシリンダ11とホイールシリンダ12との連通を遮断し、ブレーキペダル9の踏み込みが解除された後もブレーキ液圧をホイールシリンダ12に残してブレーキ力を保持することができる車両のブレーキ力保持制御装置において、車両が停止状態にあるときに前記自動変速機4の油圧が予め定められた閾値を超えると、その時点で車両の発進が可能であると判断してブレーキ力の保持を解除するECU(制御手段)3を設ける。
(もっと読む)
車両の制動制御装置
【課題】ポンプの駆動態様の変更に起因した駆動音の大きさの変動によって車両の搭乗者に不快感を与えることを抑制できると共に、ポンプの駆動態様をホイールシリンダからリザーバ内に流入するブレーキ液の液量に応じた駆動様態に設定できる車両の制動制御装置を提供する。
【解決手段】ECUは、ABS制御中において車両が走行している路面が高μ路から低μ路に変わっていない場合、偏差補正量Qreq_Aveと基準吐出量Qreq_baseとを加算することにより設定された目標吐出量Qreqのブレーキ液がポンプから吐出されるように偏差ポンプ駆動制御を実行する。一方、ECUは、車両が走行している路面が高μ路から低μ路に変わった場合、緊急補正量Qreq_Skidと基準吐出量Qreq_baseとを加算することにより設定された目標吐出量Qreqのブレーキ液がポンプから吐出されるように緊急ポンプ駆動制御を実行する。
(もっと読む)
車両制御装置
【課題】追従走行時における車間制御を、より適切に行うことのできる車両制御装置を提供すること。
【解決手段】自車1の走行方向の前方を走行する先行車100の走行情報を取得し、取得した走行情報に基づいて先行車100に追従する追従走行制御を行う車両制御装置2であって、追従走行制御時には、先行車100の加減速制御の開始時点から、先行車100の加減速制御の開始を走行情報に基づいて自車1が検出するまでの検出遅れ時間と、自車1が加減速制御信号を送信した時点から自車1が加減速制御を開始するまでの制御応答遅れ時間と、の和以上で先行車100と自車1との車間時間を設定し、且つ、自車1の走行時の環境または走行状況の少なくともいずれか一方に応じて検出遅れ時間または制御応答遅れ時間の少なくともいずれか一方を変更する。
(もっと読む)
車両制御装置
【課題】先行車と自車との相対的な制動応答特性の差異に関わらず、追従走行制御時に適切に自車を減速させることのできる車両制御装置を提供すること。
【解決手段】車両制御装置2に、自車1の前方を走行する先行車100の走行情報を取得し、取得した走行情報に基づいて自車1の走行状態を制御する通信追従走行制御ECU40と、先行車100の減速ジャーク情報を取得する先行車走行情報取得部45と、通信追従走行制御ECU40が先行車100の減速に応じて自車1を減速させるタイミングを先行車100の減速ジャーク情報に基づいて変化させる減速度算出部33と、を備える。
(もっと読む)
車両制御装置
【課題】車車間通信によって先行車の走行情報を取得しながら行う自車の走行制御を、より適切に行うことのできる車両制御装置を提供すること。
【解決手段】自車1の前方を走行する先行車100の車車間通信情報を取得し、取得した先行車100の車車間通信情報に基づいて自車1の走行状態を制御する車両制御を行う車両制御装置であって、車両制御時のパラメータに応じて、車車間通信の制御を変化させる。これにより、車車間通信の制御の状態に応じて自車1の走行制御の形態を切替える頻度を低減させることができる。この結果、車車間通信によって先行車100の走行情報を取得しながら行う自車1の走行制御を、より適切に行うことができる。
(もっと読む)
車両の制動制御装置
【課題】 ABS制御開始時の「G抜け感」を抑制することができる車両の制動制御装置を提供する。
【解決手段】 ABS制御の作動を予測するABS作動予測手段を設け、ブレーキコントローラ5は、ABS制御の作動が予測された場合、ABS制御の作動が予測された場合、ブレーキ液圧ユニット19の性能で決まる摩擦制動力上昇勾配に合わせた減少勾配で回生制動力をゼロまで減少させる。
(もっと読む)
車両制御装置
【課題】より適切な自車の減速を行うことのできる車両制御装置を提供すること。
【解決手段】自車1の走行方向の前方を走行する先行車の走行情報を取得し、取得した走行情報に基づいて先行車100に追従する追従走行制御において先行車100が減速した際に、先行車100の減速前の先行車100と自車1との車間時間が経過するまでに、取得した走行情報における先行車100の減速度と同じ大きさの減速度を自車1に発生させる。これにより、先行車100の減速中に先行車100に追突することなく、自車1を減速させることができる。また、車間時間が経過するまでに先行車100の減速度と同じ大きさの減速度を自車1に発生させることによって減速を行うので、必要以上に減速を行わないので、自車1の後方に他の車両が走行している場合でも、後続車に対する影響を低減することができる。
(もっと読む)
車両用制動装置
【課題】回生制動による制動力を状況に応じて変えるとともに、車両の運動エネルギを好適に電気エネルギに変換できる車両用制動装置を提供することを課題とする。
【解決手段】走行用モータ3の減速比を変更可能な変速機4aを有するハイブリッド車両HVに備わり、ブレーキペダルの操作量に応じて設定される目標制動力に基づいてブレーキアシスト制御する車両用制動装置1とする。そして、走行用モータ3を回生制御して回生制動力を発生する回生ブレーキと、油圧で作動するブレーキ作動部Brで摩擦制動力を発生する油圧ブレーキと、を備え、ブレーキアシスト制御の開始条件が成立したとき、車両用制動装置1は、回生制動力が低下するように減速比を設定した後で減速比の変更を停止し、回生制動力と摩擦制動力で目標制動力を発生することを特徴とする。
(もっと読む)
車両運動制御装置
【課題】車両に横運動が発生していない状態においても、ドライバフィーリングよく車両を加減速する車両運動制御装置を提供する。
【解決手段】車両運動制御装置において、自車両前方のカーブ形状を取得するカーブ形状取得手段と、自車両の位置を取得する自車位置取得手段と、そのカーブ形状及びその自車両の位置に基づいて、車両に発生させる前後加速度指令値を演算する車両運動制御演算手段と、を有し、車両運動制御演算手段は、自車両がカーブ前からカーブ進入し、カーブ曲率が一定、もしくは最大になる地点まで走行する際に、複数の異なる負の前後加速度指令値を演算する。
(もっと読む)
車両制御システム
【課題】車両の制御における制御目標を適切なものとすることができる車両制御システムを提供すること。
【解決手段】道路上の車両の走行状態に関する情報に基づいて要求される第一の要求加速度acooperateおよび自車両の直前を走行する先行車あるいは自車両の前方の障害物の少なくともいずれか一方と自車両との相対関係に基づいて要求される第二の要求加速度aaccから目標加速度を選択する場合、第一の要求加速度および第二の要求加速度のうち最小の加速度を目標加速度として自車両の加速度を制御する。
(もっと読む)
運転支援装置、運転支援方法、及び運転支援プログラム
【課題】ドライバの運転傾向を考慮して、効率よく回生ブレーキによる電力の回生が行われるように案内を行うことができる、運転支援装置、運転支援方法、及び運転支援プログラムを提供すること。
【解決手段】運転支援装置50は、回生ブレーキにより回生された電力を特定する回生電力特定部51aと、車両から対象地物までの距離に基づくタイミングで、車両の減速を促す旨の案内を行う案内部51bと、回生電力特定部51aにより特定された、案内部51bが案内を行ってから対象地物を通過するまでに行われたブレーキ操作に応じて回生ブレーキにより回生された電力に基づき、案内部51bが案内を行うタイミングを設定する設定部51cとを備え、案内部51bは、設定部51cにて設定されたタイミングで新たな案内を行う。
(もっと読む)
惰行制御装置
【課題】低μ路走行時の惰行制御が回避できる惰行制御装置を提供する。
【解決手段】車両が低μ路走行中であることを認識する低μ路走行認識部4と、前記低μ路走行認識部により車両が低μ路走行中であることが認識されているときは惰行制御を禁止する低μ路走行中惰行制御禁止部5とを備える。
(もっと読む)
ブレーキ制御システム
【課題】 鋳鉄製のブレーキシューを用いたブレーキ装置であっても、非常ブレーキ動作時に減速度が大きくなってしまうことを防止することができ、安全性を高めることのできるブレーキ制御システムを提供する。
【解決手段】 列車1に搭載され車輪3の制動を行うためのブレーキ装置4と、ブレーキ装置4を駆動制御するためのブレーキ制御装置5と、非常ブレーキ時に動作されブレーキ制御装置5に非常ブレーキ動作信号を出力する非常ブレーキ装置9とを備えてなり、ブレーキ制御装置5により、非常ブレーキ装置9から非常ブレーキ動作信号が入力された場合に、ブレーキ装置4による列車1の減速度が大きくなる前に、エア圧力を調整させてブレーキ力を弱くするように制御する。
(もっと読む)
状況適合型運転支援装置
【課題】様々な走行状況に適合した最適な運転支援を行うことができる状況適合型運転支援装置を提供する。
【解決手段】モデルを予測しつつアシスト量最適化問題を逐次解くことにより、最適アシスト量を逐次決定するモデル予測部41と、そのモデル予測部41が決定した最適アシスト量に基づいて、減速アクチュエータ10の制御を行うアクチュエータ制御装置20とを備え、さらに、車両の危険度を判断する危険度判断部42と、その危険度判断部42が判断した危険度に応じて、アシスト量最適化問題に含まれるパラメータを調整するパラメータ調整部43を備える。モデル予測部41は、パラメータ調整部43が調整したパラメータを用いて最適アシスト量を逐次決定する。
(もっと読む)
電動車両のブレーキ制御装置
【課題】回生制動力が不足する制動シーンにおいて、ポンプモータの作動を必要最小限に抑えることで、ポンプモータの耐久信頼性の向上を達成すること。
【解決手段】電動車両のブレーキ制御装置は、ブレーキ液圧発生装置1とVDCブレーキ液圧ユニット2とモータコントローラ8と統合コントローラ9を備えた。ブレーキ液圧発生装置1は、ブレーキ操作に応じた基本液圧を発生する。VDCブレーキ液圧ユニット2は、ポンプモータ21と液圧ポンプ22を有し、基本液圧の増圧・保持・減圧を制御する。モータコントローラ8は、走行用電動モータ5により発生する回生制動力を制御する。統合コントローラ9は、制動操作時、ドライバーが要求する減速度を基本液圧分と回生分の総和で達成し、不足する回生分を基本液圧の加圧分により補償する制御を行うと共に、基本液圧の加圧分による補償制御中、回生制動力が増加方向であるか減少方向であるかに応じてポンプモータ21のオン・オフ制御を行う。
(もっと読む)
ハイブリッド車
【課題】内燃機関を始動する際に運転者に違和感を与えるのを抑制する。
【解決手段】停車中にエンジンを始動する停車始動時において、バッテリの出力制限Woutが閾値Wref未満のときには(S120)、停車始動時の車輪(駆動輪39a,39bや従動輪)の固定に要する最低限の制動力である固定用最低限制動力Flomin以上の制動力の油圧ブレーキによる車輪への付与を伴ってエンジンをモータリングして始動する(S110,S160〜S200)。これにより、バッテリの出力制限Woutが大きく制限されている状態での停車始動時において、運転者に違和感を与えるのを車輪のより確実な固定によって抑制することができると共に、モータMG2の電力消費の抑制によってバッテリからの放電電力を低減することができる。
(もっと読む)
車両制御装置
【課題】先々行車両の存在の検出精度を向上することが可能な車両制御装置を提供する。
【解決手段】本発明の一実施形態に係る車両制御装置1は、反射体を利用してレーダ20によって先々行車両を認識し、当該レーダ20によって認識された先々行車両に基づいて自車両の走行制御を行う車両制御装置において、道路以外の反射体を認識する反射体認識手段42と、レーダ20によって先々行車両が認識されない場合であっても、反射体認識手段42によって道路以外の反射体が認識されない場合には、先々行車両がいるかもしれないと推定する先々行車両推定手段43と、レーダ20によって先々行車両が認識されない場合であっても、先々行車両推定手段43によって先々行車両がいるかもしれないと推定された場合には、自車両の走行制御を行う走行制御手段44とを備える。
(もっと読む)
車両
【課題】旋回安定性を十分に高くすることができるようにする。
【解決手段】互いに連結された操舵部及び駆動部を備える車体と、車体を操舵する操舵輪と、車体を駆動する駆動輪と、操舵部材と、内周面に沿って第1の係合部68が形成された固定部材58と、固定部材の径方向内方において回動自在に配設され、操舵部材の操作に伴って回動させられる回動部材59と、回動部材の外周縁に配設され、第2の係合部を備えた規制部材64,65と、操舵軸の操舵速度を検出する操舵速度検出手段と、駆動部を旋回方向に傾斜させる傾斜用アクチュエータ装置と、傾斜用アクチュエータ装置を制御して車体の傾斜を制御する制御装置とを有する車両であって、操舵軸の操舵速度が所定の閾値を超えた場合、第2の係合部を第1の係合部と係合させ、回動部材の回動を規制するとともに、制動を行って車速を低下させる。
(もっと読む)
四輪駆動車の制御装置
【課題】駆動系に付加される捩れトルクを低減して、駆動系部品の耐久性を向上する。
【解決手段】センターデフロック状態での旋回走行中に、駆動系に蓄積された捩れに伴う発生捩れトルクTh(DS捩れトルクThDS)が所定トルク(DS許容トルクTy)以上となる駆動系の捩れ状態となった場合は、前輪14にホイールブレーキ装置96によるブレーキトルクTBが加えられるので、例えば前輪14にかかるDS捩れトルクThDSの一部をホイールブレーキ装置96によるブレーキトルクTBで分担することができる為、駆動系(フロントDS34)に実質的に付加されるDS捩れトルクThDSが低減される。よって、駆動系部品の耐久性が向上される。その為、例えば駆動系部品の耐久性を確保する為に駆動系部品を大型化したりする必要が無く、駆動系部品の小型化や軽量化を図ることができる。
(もっと読む)
201 - 220 / 1,039
[ Back to top ]