
Fターム[3D246HB11]の内容
ブレーキシステム(制動力調整) (55,256) | 検知、推定情報−車外情報 (2,668) | 車外障害物 (944)
Fターム[3D246HB11]の下位に属するFターム
Fターム[3D246HB11]に分類される特許
1 - 20 / 249
車両の緊急制動制御装置及びその方法
衝突被害軽減装置
車輌停止前後のペダル作動状態に基づき自動制動の解除を判断する車輌
車両の制御装置
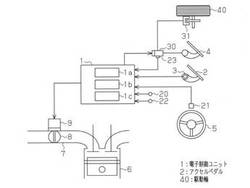
【課題】アクセルの誤操作を適切に判定することにより、駆動力低下によるドライバビリティの悪化を抑えることのできる車両の制御装置を提供する。
【解決手段】電子制御ユニット1は、駆動輪40の駆動力を低下させる駆動力低下制御を実行する。そして電子制御ユニット1は、車両進行方向における障害物の接近を検出してから所定の判定時間が経過した後にアクセルペダル2が操作されたときには、駆動力低下制御として駆動輪40の制動を行う。
(もっと読む)
車両用走行支援装置

【課題】 交差点右折時に自車右側から交差点に進入してくる障害物との接触を回避できる車両用走行支援装置を提供する。
【解決手段】 自車が演算された旋回経路を走行した場合のカメラ1の視界領域と死角領域との境界と死角移動物体の予測移動経路との交点を死角端点としたとき、交差点内で検出された自車位置における死角端点の位置を演算する死角端点位置演算部17と、演算された死角端点位置での死角移動物体の移動方向における死角端点の移動速度Vdを演算する死角端点移動速度演算部18と、記憶された死角移動物体の移動状態に基づいて、演算された死角端点位置における死角移動物体の移動速度Vnを検出する死角移動物体移動速度演算部19と、演算された死角端点移動速度Vdが演算された死角移動物体移動速度Vnよりも高くなるように自車速Vを制御する速度制御部20と、を備えた。
(もっと読む)
車両の走行制御方法及び走行制御装置
【課題】衝突回避制御に対し運転者が違和感を感じることを防止する。
【解決手段】車両制御コントローラ12が、運転者による車両1の操舵に対応する衝突回避軌道を選択し、選択した衝突回避軌道に基づいて走行するように車両1を制御する。これにより、衝突回避制御によって運転者が行っている車両操作、換言すれば運転者の反応が妨げられ、衝突回避制御に対し運転者が違和感を感じることを防止できる。
(もっと読む)
車両の制動制御装置
【課題】エンジンブレーキが発生する場合においても、ガタ詰めが必要なモードにおいては、ガタ詰めが適切に機能する制動制御装置等を提供する。
【解決手段】自車両に備わる制動制御装置は、本制動の前に、自車両のディスクロータとブレーキパッドとの隙間を詰める事前制動を実行する事前制動部と、自車両の駆動力に基づいて、事前制動部による制動力を算出する算出部と、エンジンブレーキにより自車両の制動を実行するエンジンブレーキ制動部と、事前制動部による事前制動が必要であるか否かを判定する判定部と、事前制動部による制動を制御する制御部とを備え、制御部は、エンジンブレーキ制動部による制動力が、算出部によって算出された事前制動部による制動力よりも大きく、かつ、判定部による判定結果が肯定である場合に、事前制動部による制動を実行する。
(もっと読む)
車両の制動制御装置
【課題】車両の制動制御装置において、制動時における車両の挙動を安定させることで安全性の向上を可能とする。
【解決手段】ECU41として、車輪FR〜RLのスリップが抑制されるように制動装置22を作動制御するABS制御装置51と、車両11の周辺情報に基づいて制動装置22を作動制御する自動制動制御装置52と、ABS制御装置51の作動開始の閾値を自動制動制御装置52の非作動時より自動制動制御装置52の作動時の方が小さくなるように変更する作動開始閾値変更装置とを設ける。
(もっと読む)
車体速度制御装置
【課題】運転者に対して快適な運転支援が行われるように車体速度を制御できる車体速度制御装置を提供すること。
【解決手段】ブレーキ制御ECU1が、速度制御位置設定処理を実行することにより、積荷スペースに荷物が搭載された場合には(S12:Yes)、車輪速度の演算される位置(制御位置)として積荷スペースの位置が設定され(S13)、車両VLの走行路が狭幅道路である場合には(S14:Yes,S15:Yes)、車輪速度の演算される位置(制御位置)として旋回外側のフェンダーミラーの先端の位置が設定される。このように、車両における状況や環境に応じて、搭乗者に対する運転支援を行うのに適切な位置を車体速度が制御される位置として設定することができるので、搭乗者に対して快適な運転支援が行われるように車体速度を制御できる。
(もっと読む)
車両操作支援装置
【課題】障害物の移動状態に応じた車両の操作支援を実行可能な車両操作支援装置を提供すること。
【解決手段】自車に対する障害物を検知し、その検知結果を用いて少なくとも障害物と自車との相対速度及び相対距離を検出する障害物検知手段M1を備え、検出の結果に基づいて障害物に対する回避支援を行う車両操作支援装置Uにおいて、自車速度と相対速度と相対距離とに基づいて、障害物が回避支援の対象となるか否かを判定する回避支援対象判定手段M2を備え、相対速度が自車速度と略等しい場合に、障害物を、少なくとも車両進行方向に移動していない停止障害物であると判定し、相対速度が自車速度と異なる場合にて、相対速度と相対距離とに基づいて算出した衝突余裕時間の単位時間当たりの減少量が所定の減少量以上の場合は、障害物を急接近障害物と判定し、所定の減少量未満の場合は、障害物をその他の障害物と判定する。
(もっと読む)
車両の制駆動力制御装置及び制駆動力制御方法
【課題】段差を通過して間もない位置に車両を停止する必要があっても、急な速度変化が発生することを抑制可能とすることを目的とする。
【解決手段】車両の制動力及び駆動力を制御して、取得した目標位置に車両を誘導または駐車する車両の制駆動力制御する際に、段差を通過する際に生じる目標位置に対する車両の相対速度の変動に応じて駆動力指令値を増大する。但し、上記段差を乗り越えるために、当該段差に接触した車輪の上方への変位である車輪の浮き上がりと判定すると、上記付加駆動力分の指令値が小さくなるように、上記駆動力指令値の上昇を抑制する。そして、駆動力指令値の抑制中に制動指令を制動装置に出力する。
(もっと読む)
移動体通信装置及び追突防止支援方法
【課題】感知エリア外に追突する可能性がある他の移動体(他の車両)が存在する可能性があるときに、当該追突する可能性がある他の移動体(他の車両)との事故を未然に防ぐ追突防止支援を行う移動体通信装置及び追突防止支援方法を提供すること。
【解決手段】移動体に備えられ、感知器が検出した感知エリアに存在する他の移動体の情報を含む情報を受信する通信部と、前記感知エリアに他の移動体が存在するときに、報知部を介して減速目標位置に到達するまでに前記移動体の移動速度を減速目標速度にするよう報知を行う制御部と、を備える移動体通信装置であって、前記制御部は前記感知エリアに存在する他の移動体の情報に基づいて、前記感知エリア外に追突する可能性がある他の移動体が存在するか否かを判断し、前記感知エリア外に追突する可能性がある他の移動体が存在すると判断したときは、前記減速目標位置及び/又は前記減速目標速度を変更することとする。
(もっと読む)
走行制御装置
【課題】 ドライバに与える違和感を軽減できる走行制御装置を提供する。
【解決手段】 自車走行路前方の車幅方向と高さ方向による走行路および障害物を検出し、走行路前方の立体空間を検出する立体空間検出部11と、検出された立体空間に対し、自車の障害物に対する衝突リスクの高さを推定する衝突リスク推定部12と、推定された衝突リスクの高さに応じて、衝突リスクが高い部分から距離を取るように自車の目標経路を演算する目標経路演算部13と、演算された推奨経路に基づいて運転支援を行う運転支援部14と、を備えた。
(もっと読む)
自動走行制御装置
【課題】運転者の自動走行運転への適正な関わりを検出するとともに、運転者の自動走行運転に対する監視放棄を抑制することのできる自動走行制御装置を提供すること。
【解決手段】自動走行制御中の第1所定時間経過後に(S1)、車速を自動走行制御に基づく目標車速から運転監視確認用車速に減速させ(S2、S3)、所定期間内に運転者の反応が検出されなかった場合には(S4〜S9)、運転者への警告を発するとともに自動走行制御を停止する(S10)。
(もっと読む)
車両のヨーモーメント発生旋回効率化装置
【課題】急な旋回の必要時に車両の旋回ヨーモーメントを効率的に発生させることができて、緊急操舵時の確実な転舵が行えるヨーモーメント発生旋回効率化装置を提供する。
【解決手段】左右の車輪1L,1Rを独立して制動力制御または駆動力制御可能なブレーキ4L,4Rおよび駆動系6のいずれか一方と、前記左右の車輪1L,1Rを独立して転舵可能な転舵装置3とを備えた車両20に適用される。操舵手段18の指令に従って転舵装置3を駆動するときに、左右の車輪1L,1Rの転舵動作に時間差を生じさせると共に、左右の車輪1L,1Rの制動・駆動力差を生じさせて旋回ヨーモーメントを発生させる旋回アシスト制御を行う制御手段9を設ける。
(もっと読む)
車両制御装置、および車両制御プログラム
【課題】車両の危険状態を抑制するための車両制御装置において、運転者がアクセルとブレーキとを踏み間違えたときに、車速が大きくなる前に危険状態を抑制できるようにする。
【解決手段】誤操作防止システムを構成する制御部は、アクセルの操作量の情報を示すアクセル情報を繰り返し取得し、アクセル情報に基づいて、アクセルの操作量が、予め設定された減少判定時間以内に減少閾値以上減少し、その後、予め設定された増加判定時間以内に増加した場合、運転者がアクセルとブレーキとを踏み間違えたものと判断する(S150、S160)。そして、踏み間違いと判断された場合、当該車両の加速を抑制する(S290)。このシステムによれば、アクセルの操作量が減少後に増加すれば直ちに当該車両の加速を抑制することができるので、車速が大きくなる前に加速を抑制することができる。
(もっと読む)
制動力制御装置
【課題】路面推定の精度を向上させることが可能な制動力制御装置を提供する。
【解決手段】制動力制御装置12では、前後Gセンサ42が検出した車両10の前後加速度である前後G検出値に基づいて路面推定を行う路面推定手段110と、ホイールシリンダ62a〜62dにかかるブレーキ液圧を増圧、減圧又は保持させることで、車輪18のロックを防止するアンチロック制御手段112とを備える。路面推定手段110は、アンチロック制御中に前記ブレーキ液圧が増圧又は増圧保持となっている車輪18の数に応じて前記前後G検出値を補正した前後G補正値に基づいて路面推定を行う。
(もっと読む)
車両用運転支援装置
【課題】自動制動で自車両が停止した後に運転者に対してアクセルペダルの踏み込みの解除を促すことができる。
【解決手段】車両用衝突回避制動支援装置1は、障害物への自車両の接近に関してリスクポテンシャルを算出する支援情報演算部30と、支援情報演算部30が算出したリスクポテンシャルに基づいて、自車両に制動力を付与する制動力演算部40及び制動力付与装置8と、自車両・障害物情報取得部20が検出した自車両の走行状態と制動力演算部40及び制動力付与装置8が制動力を付与したことに基づき該制動力を付与したことによって自車両が停止したと判定すると、アクセルペダル反力を付与するアクセルペダル反力演算部50及びアクセルペダル反力付与装置9と、を有する。
(もっと読む)
車両状態検出装置
【課題】車両に設置されたカメラ20で撮像された画像データに基づいて、自車両の状態を検出する車両状態検出装置であって、その検出精度を向上させることを目的とする。
【解決手段】制御装置10(CPU11)は、カメラ20で撮像された複数の画像データを取得して、この複数の画像データの夫々において特徴点を抽出し、時間的に連続する画像データにおいて、特徴点の位置を追跡処理することによって複数のオプティカルフローを導出する(S10〜S30)。そして、導出された複数のオプティカルフローにおいて、方向と大きさの両方が同じであるオプティカルフロー同士を一つのグループに分類するとともに、オプティカルフローが最も多く含まれるグループのオプティカルフローを、自車両に対応する自車オプティカルフローとして選択し、選択された自車オプティカルフローに基づいて自車両の状態を検出する(S50〜S70)。
(もっと読む)
車両用制動制御装置
【課題】従来よりも適切な車両の制動制御を可能とする車両用制動制御装置を提供する。
【解決手段】自車両と障害物との衝突の危険性に応じて自動的に車両を制動する車両用制動制御装置であって、自車両と障害物との衝突の危険性が高いか否かを判定する衝突判定手段と、衝突判定手段によって自車両と障害物との衝突の危険性が高いと判定された場合、自車両に自動的に制動力を発生させる自動制動手段と、自動制動手段が発生させる制動力の大きさを自車両のドライバーの操舵操作に応じて漸減する制動力漸減手段とを備え、制動力漸減手段は、制動力の漸減速度を自車両のドライバーのアクセル操作に応じて速くすることを特徴とする。
(もっと読む)
1 - 20 / 249
[ Back to top ]