
Fターム[3D246HB14]の内容
ブレーキシステム(制動力調整) (55,256) | 検知、推定情報−車外情報 (2,668) | 車外障害物 (944) | 車種、二輪車 (20)
Fターム[3D246HB14]に分類される特許
1 - 20 / 20
衝突危険度判定装置
【課題】衝突危険度を精度よく判定する。
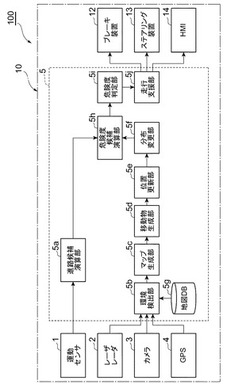
【解決手段】衝突危険度判定装置100では、環境検出部5bにより移動物の位置分布及び移動状態分布を検出し、マップ生成部5cにより存在可能度マップを生成する。移動物生成部5d、位置更新部5e及び分布変更部5fにより、存在可能度マップ上にて移動物の将来位置分布を予測する。進路候補演算部5aにより、自車両10の進路候補を複数演算する。危険度候補演算部5hにより、存在可能度マップ上で複数の進路候補それぞれの衝突危険度候補を演算する。そして、危険度判定部5iにより、演算された複数の衝突危険度候補に基づき複数の進路候補のうち一の進路候補を選択し、選択した当該一の進路候補の衝突危険度候補を衝突危険度として判定する。ここで、危険度候補演算部5hは、移動コストと運動コストと衝突確率とに基づき衝突危険度候補を演算する。
(もっと読む)
車両用運転支援装置

【課題】自車両前方を横切って進路変更を行うすり抜け車両に対する自動ブレーキの作動/非作動を、運転者毎に個別に設定することができるようにする。
【解決手段】PB_ECU13は、運転者の携帯する無線携帯機5に登録されている運転者についての登録情報を読込み(S2)、この登録情報に基づいてすり抜け車両Mが自車両1の前方を横切る際の横移動速度Syに対するしきい値Syoを設定する(S4)。そして、ブリクラッシュブレーキ制御において、すり抜け車両Mが自車両1の前方を横切って車線変更する際の横移動速度Syとしきい値Syoとを比較し、Sy≧Syoの場合、すり抜け車Mを先行車から除外する(S24)。しきい値Syoは、機敏な運転を好む運転者は高く、緩やかな運転を好む運転者は低く設定される。しきい値Syoが高く設定されると当該すり抜け車両Mを先行車として認識する頻度が少なくなり、逆の場合は認識頻度が多くなる。
(もっと読む)
被害軽減制動装置及び方法
【課題】自車両が相手車両の側面に衝突するときの角度に応じて、衝突回避システムが衝突回避動作時に行う制御内容を異ならせる被害軽減制動装置を提供する。
【解決手段】ステップS103及びS104において自車両が相手車両の側面に衝突すると予測される場合、自車両の進行方向軸と相手車両の側面とのなす角である衝突面角度が算出される(ステップS105)。予め保持されている制限係数マップから、算出された衝突面角度に予め割り当てられている制限係数を読み出して、読み出された制限係数が衝突回避の制動制御時に使用される制限係数に決定される(ステップS106)。衝突回避システムが衝突回避動作時に本来適用している減速Gに、この決定された制限係数が乗算されて新たな減速Gが求められる(ステップS108)。求められた新たな減速Gに従って、ブレーキの制動力等が制御される(ステップS109)。
(もっと読む)
減速制御装置、方法およびプログラム
【課題】運転者が煩わしさを感じることを抑制すること。
【解決手段】車両の前方の状況に基づいて前記車両を停止させるべき停止要因を特定し、前記停止要因が解消するタイミングが前記車両の運転者の運転操作に依存しない場合には、所定の制動期間で前記車両を停止させる第1減速制御を実行対象減速制御として選択し、前記停止要因が解消するタイミングが前記車両の運転者の運転操作に依存する場合には、前記第1減速制御よりも制動期間が短い第2減速制御を実行対象減速制御として選択し、前記実行対象減速制御を実行して前記停止要因に応じた停止位置にて前記車両を停止させる。
(もっと読む)
前面衝突時オーバーラップ量制御装置
【課題】前面衝突時オーバーラップ量制御装置に関し、運転者の操舵操作等による衝突回避の可能性を確保しながら、衝突した場合の運転者の衝突被害を軽減することができるようにする。
【解決手段】自車両2の前方に衝突可能性のある障害物3が検知された場合に自車両2を横移動させ、障害物3との前面衝突時のオーバーラップ量を制御する装置において、自車両前部に運転者以外に乗員がおらず、また、運転者による衝突回避とみなせる操舵操作がなく、また、自車運転席前部Aを含むオーバーラップ部分OLでの障害物3との衝突が予測され、さらに、自車両2を横移動させた際オーバーラップ部分OLのオーバーラップ量がゼロになる回避スペースがあると判断された場合に、上記オーバーラップ量をゼロにする方向に自車両2を横移動させる。
(もっと読む)
走行制御目標生成装置
【課題】安全性を確保しつつ走行時間の短縮が実現でき、車両乗員の快適性を向上させ得る走行制御目標生成装置を提供する。
【解決手段】走行制御目標生成装置1は、車両の走行状態変化速度を用いて走行制御目標を生成する。走行制御目標生成装置1は、車両の進行方向に沿った所定領域内に存在する可動障害物を検出する可動障害物検出手段と、可動障害物検出手段によって検出された可動障害物との接触が起こり得るか否かを判定する接触可否判定手段と、接触可否判定手段によって可動障害物との接触が起こり得ないと判定されたときは、接触が起こり得ると判定されたときよりも走行状態変化速度が大きくなる走行制御目標で制御する。
(もっと読む)
自動車の周囲環境のモニタリング方法
【課題】 自動ブレーキの不適切な作動を防止しながら、1つの進路にしたがって移動することができる自動車の周囲環境をモニタする方法を提供する。
【解決手段】 本発明の方法は、検出センサ、自動車に関するパラメータ、および自動車の周囲環境内にある障害物に基づいて、複数の運転危険度を計算するステップと、障害物が、自動車の進路上にあるか否かを特定するステップと、計算された運転危険度、および自動車の進路上の障害物の特定に基づいて、自動車のブレーキの作動に関する判定を行うステップとを含んでいる
(もっと読む)
車両用運転支援装置
【課題】自車の制動によって後方障害物との追突危険性がある場合に、後方障害物に制動操作を働きかけるような自車制動を行い、追突危険性を緩和することができる車両用運転支援装置を提供する。
【解決手段】自車が制動を行う場面か否かを判断する制動必要性判別手段9と、自車の運動状態を検出する自車状態検出手段と、自車の後方を走行する車両を検出する後続車検出手段と、制動必要性判別手段9によって自車が制動を行う必要性があると判断したときに、自車と後続車の情報に基づいて、後続車と接触せずかつ後続車に制動を促すような自車制動力を実現する自車制動力決定手段10と、を備えることにより、自車の制動によって後方障害物との追突危険性がある場合に、後方障害物に制動操作を働きかけるような自車制動を行い、追突危険性を緩和することができる。
(もっと読む)
車両の運転支援装置
【課題】道路を横断する立体物の横断領域を基準とするリスクを設定して回避動作を抑制し、横断領域手前で自車両を安全に停止させる運転支援を可能とする。
【解決手段】横断歩道エリアに歩行者等の立体物が存在する場合、道路に対するリスク関数Dlineと横断リスク関数Dcrossとを合成し、自車両から所定の距離までは道路端側のリスク値が若干高い分布で、その先の横断歩道エリアに、道路幅方向に尾根状となる高いリスク値を有する分布が出現するトータルリスク関数Dが設定される。そして、自車両の進行によって尾根状のリスク分布におけるリスク値が閾値に達した場合、ドライバに対して停止を促す警報を出力し、場合によっては自動ブレーキを作動させる。
(もっと読む)
車両の運転支援装置
【課題】自車両に搭載した装備のみで他車両のルートを適切に予測し、精度の良い運転支援を行う。
【解決手段】制御ユニット5は、移動する立体物毎に、移動する立体物を基準とする座標系を設定し、移動する立体物がこの座標系で移動する際のリスクを演算し、このリスクが最小となる走行ルートを回避ルートとして推定し、回避ルートのリスクに応じて、自車両1のディスプレイ21により警報を行うと共に、自動ブレーキ制御装置22に信号を出力して自動ブレーキ制御を実行させる。
(もっと読む)
車両制御装置
【課題】
従来技術によれば、自車左に障害物がある場合、当該障害物を回避するよう制御閾値が設定され、自車は当該制御閾値を超えると逸脱量に従って制御閾値を超えない位置まで戻るよう制御されるが、自車右にリスクを持った対向車が接近している場合でも、対向車の方へ自車を制御するため、運転者にとって恐怖感や違和感を与える、という課題がある。
【解決手段】
車両制御装置は、自車の左に存在する第1の危険度、及び、自車の右に存在する第2の危険度を算出する算出部と、第1の危険度に基づいて第1の制御閾値を自車の左に設定し、第2の危険度に基づいて第2の制御閾値を自車の右に設定する設定部と、第1及び第2の危険度に基づいて、第1又は第2の制御閾値のうち、少なくとも何れか一方を変更する変更部を備える。
(もっと読む)
車両走行支援装置
【課題】走行中の障害物を回避する際に、十分な安全性を確保すると共に、適切な走行支援を行うことができる車両走行支援装置を提供する。
【解決手段】物体領域設定部17が、障害物検出部12及び二輪車判定部13により障害物として二輪車が検出された場合に、障害物の高さに基づいて物体領域Aを設定する。障害物が二輪車の場合は、転倒することによって必要とされる物体領域Aが増大する可能性があるが、障害物の高さに基づいて物体領域Aを設定することによって、転倒の可能性も考慮して安全性を確保することができる。また、障害物の高さに基づいて、転倒の可能性も考慮した必要最低限度の物体領域Aを設定することができるため、必要以上に広い物体領域Aを確保することを防止することができる。
(もっと読む)
走行制御装置
【課題】状況に応じた適切な制御によって障害物との衝突の発生及び二次衝突の発生を回避できる走行制御装置を提供する。
【解決手段】走行制御装置1では、自車両が障害物と衝突する可能性があると判断したときに減速制御を実行し、自車両と障害物との衝突の発生を回避する。また、走行制御装置1では、周辺環境情報に基づいて定められる作動条件として、減速制御の実行開始から所定時間が経過するまでに実際に衝突が発生した場合、或いは自車両が交通弱者との衝突の可能性が他の場所に比べて高い交差点付近に位置している場合には、減速制御を開始してから所定時間が経過した後も減速制御を維持する。したがって、走行制御装置1では、状況に応じた適切な減速制御が実行され、二次衝突の発生を精度良く回避できる。
(もっと読む)
車両制御装置、車両制御方法および車両制御処理プログラム
【課題】自車両の進路または進路近傍に存在する障害物を確実かつ安全に通過させるように自車両を制御することを課題とする。
【解決手段】車両制御装置は、例えば、各種レーダからの入力に基づいて、自車両の進路または進路近傍に障害物を検知すると、検知された障害物に関する障害物情報、および自車両に関する自車両関連情報を各種レーダ等から取得する。障害物情報および自車両関連情報の取得後、車両制御装置は、検知された障害物を安全に通過できるか否かを判定する通過判定を実行する。具体的には、各種レーダ等から取得した障害物情報および自車両関連情報を用いて、自車両の運転者や同乗者が、安全と感じる程度以上の距離を障害物と自車両との間で保てるか否かを基準とした判定を行う。
(もっと読む)
車両の運転支援装置
【課題】実際の回避走行に沿った目標自車進路を設定して自然な運転支援を行う。
【解決手段】制御ユニット5は、対象物と自車両1との相対速度Vfと対象物の種類に応じて対象物からの横移動量Wを設定し、対象物からの横移動量Wと距離dとに基づいて目標自車進路を推定し、最大横加速度(d2y/dt2)maxを推定する。そして、最大横加速度(d2y/dt2)maxが、警報制御閾値Ca以上の場合は警報制御を行ない、ブレーキ制御閾値Cb以上の場合は警報制御を行うと共にブレーキ制御を行う。また、許容最大横加速度(d2y/dt2)max_cを設定し、許容最大横加速度(d2y/dt2)max_cと対象物からの横移動量Wと自車速Vとに基づいて限界自車進路を推定して必要横加速度(d2y/dt2)cを演算し、実横加速度(d2y/dt2)rと必要横加速度(d2y/dt2)cとに基づいて操舵制御を行う。
(もっと読む)
車両の走行制御装置
【課題】自車両が自車両前方の該障害物を追い越す際、該障害物との過度の接近や接触を確実に抑制し、走行時における安全性を向上させることができる技術を提供する。
【解決手段】障害物検知部1aと、危険領域設定部1dと、侵入検知部1fと、警報制御部1hとを備えている車両の走行制御装置である。障害物検知部1aは自車両前方の障害物を検知する。危険領域設定部1dは、障害物検知部1aにより検知された障害物の自車両側の側方の領域であって所定の幅を有する接触危険領域を設定する。侵入検知部1fは自車両が接触危険領域内に侵入したことを検知する。警報制御部1hは、侵入検知部1fにより接触危険領域内への自車両の侵入が検知されたときに警報装置21を作動させる。
(もっと読む)
車両用障害物検出装置
【課題】交差路において歩行者などの障害物との衝突を有効に回避することが出来るように障害物を検出する車両用障害物検出装置を提供する。
【解決手段】本発明は、交差路に設置された反射鏡に写る障害物の像を利用して障害物を検出する車両用障害物検出装置であって、交差路に設置される反射鏡を検出する反射鏡検出手段と、反射鏡に写る障害物の像を検出する障害物像検出手段と、検出された障害物の像からその障害物の反射鏡への接近度を算出する障害物接近度算出手段と、接近度に応じて警報システム及び/又は安全システムを制御するシステム制御手段と、を有する。
(もっと読む)
車両の運転支援装置
【課題】一般道路において自動車専用道路と同様に車線維持支援を行う場合に、歩行者等に対する安全性を確保する。
【解決手段】走行路認識手段(制御ユニット1の走行路認識部及びCCDカメラ2)により認識された走行路を含む道路の所定部分(車道や歩道)の幅を検出し、操舵制御停止手段(操舵制御停止部1c)が、この検出された幅が所定値よりも小さいときに、走行制御手段(操舵制御部1b)による操舵制御を停止させる。
(もっと読む)
車両制御システム
【課題】 右左折時における巻き込みの危険を回避し易い車両制御システムを提供する。
【解決手段】 車両制御システム1において、車両20は、道路上で右左折する際に、レーン内側を走行する発信器3から送信される無線識別情報を受信して、発信器3の存在判定を行なう。そして、発信器3が存在すると判定された場合には、自車両20の当該右左折走行を抑制するために加速制限制御ないし自動減速制御を実行する。
(もっと読む)
軌道上移動体制御装置および進出方向検出装置
【課題】GPS観測を利用した軌道上を移動する移動体制御において、観測誤差により隣接する他の軌道に存在する移動体や停止目標による誤警報、誤ブレーキを回避する。
【解決手段】移動体制御装置100を、コントローラ108、GPS受信機113、他移動体の移動体制御装置と送受信する無線機115、ブレーキ107及び警報ユニット109を備えて構成し、コントローラを自移動体が走行している線別、線路名称等の軌道情報を記憶する手段及び他移動体又は停止目標と自移動体の軌道情報を比較する手段を備えて構成した。
(もっと読む)
1 - 20 / 20
[ Back to top ]