
Fターム[3D246HB16]の内容
ブレーキシステム(制動力調整) (55,256) | 検知、推定情報−車外情報 (2,668) | 車外障害物 (944) | 衝突、追突、事故 (53)
Fターム[3D246HB16]に分類される特許
1 - 20 / 53
車両の制動制御装置
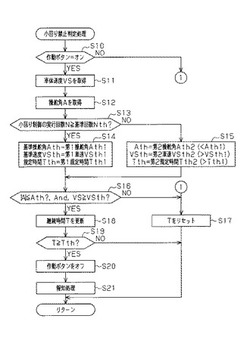
【課題】車両の旋回時に、旋回方向内側の車輪に制動力を付与させる旋回時制動制御が運転手の意図に反して行われることを抑制できる車両の制動制御装置を提供する。
【解決手段】ブレーキ用ECUは、作動ボタンがオン状態である場合(ステップS10:YES)、車両の車体速度VS及びステアリングの操舵角Aを取得する(ステップS11,S12)。そして、ブレーキ用ECUは、取得した車体速度VS及び操舵角Aに基づき、規定時間Tthの間、車両の走行状態が直進状態であることが継続中であるという第1の条件が成立した場合(ステップS19:YES)、作動ボタンをオン状態からオフ状態に自動的に変更させる(ステップS20)、又は作動ボタンの操作状態をオフ状態に変更することを促す。
(もっと読む)
車両用ブレーキ制御装置及び制御方法

【課題】車両に二次衝突が発生して前突用エアバッグが作動した場合であっても乗員に強い衝撃を加えることを回避する。
【解決手段】乗員センサ5、及びシートベルトセンサ4の検出信号に基づき、運転席及び助手席に搭乗している全ての乗員がシートベルトを装着しているか、或いは、少なくとも一人がシートベルトを装着していないかを判断する。全ての乗員がシートベルトを装着している場合には、一次衝突が発生した際に第1の減速度でブレーキ22を作動させる。また、少なくとも一人がシートベルトを装着していない場合には、第1の減速度よりも低い第2の減速度でブレーキ22を作動させる。従って、シートベルトを装着していない乗員がブレーキ22作動時の慣性力により、シートの前方に移動する可能性を低くすることができ、車両に二次衝突が発生した際に、前突用エアバッグが展開して乗員に大きな衝撃を加えるというトラブルの発生を回避することができる。
(もっと読む)
衝突回避装置
【課題】ユーザーが煩わしさを感じることのないPCS制御を行うことのできる衝突回避装置を提供する。
【解決手段】検出手段と、検出された物体を衝突判断対象物とし、当該衝突判断対象物と自車両とが衝突する可能性を判断する衝突判断手段と、衝突判断対象物と自車両との衝突を回避するための衝突回避制御を行う制御手段と、衝突回避制御を解除する解除手段と、自車両の位置を示す情報および自車両の車両情報の少なくとも一方の情報を取得する車両情報取得手段と、衝突回避制御の態様を変更する変更手段と、解除手段によって衝突回避制御が解除されたときの自車両の位置を示す情報を解除時位置情報として、解除手段によって衝突回避制御が解除されるときの自車両の車両情報を解除時車両情報として車両情報取得手段から少なくとも一方を取得し記憶する記憶手段とを備える。
(もっと読む)
衝突回避制御装置及び方法
【課題】衝突回避制御が実行中で自車両が完全に停止する前でも、自車両が対象物に衝突する可能性がなくなった時点で衝突回避制御を終了し、速やかに通常の走行状態に戻すことが可能な衝突回避制御装置を提供する。
【解決手段】衝突回避制御が実行中で、かつ対象物が移動物である場合、自車両と対象物との相対速度が予め定めたゼロ以上の閾値を超えるか否かが判断される。この相対速度が当該閾値未満の間は衝突回避制御が継続して実行され、この相対速度が当該閾値以上になったタイミング、すなわち自車両の走行速度が対象物の走行速度よりも遅くなったタイミングで衝突回避制御が終了する。
(もっと読む)
衝突回避装置
【課題】本発明は、運転者が意図しない進路変更において、対象物を回避し、当該対象物との衝突を未然に防止することのできる衝突回避装置を提供する。
【解決手段】ドライバによりステアリングが操作され(S10)、ドライバによりウインカーレバーが操作されないと(S12)、自車両の進路予測を行い(S14)、自車両の走行している走行レーンが認識不可能な場合(S16)、或いは自車両の走行している走行レーンが認識可能であってもドライバのステアリング操作により走行レーンを逸脱する虞がない場合(S24)に自車両の進路上に衝突対象物があれば(S18)、スピーカより警報を発声し(S20)、更に衝突対象との衝突を回避するように操舵アシスト及びブレーキ操作アシストを作動する(S22)。
(もっと読む)
衝突被害軽減制動制御装置
【課題】衝突発生時の被害の軽減化を図りつつ自動制動による操作性の低下の抑制を図る上で有利な衝突被害軽減制動制御装置を提供する。
【解決手段】制動制御手段44は、衝突判断手段40によって衝突が不可避であると判断された場合に、ブレーキアクチュエータ34を介してブレーキ装置32を作動させ、自車両2の自動制動を実行するものである。また、制動制御手段44は、車線逸脱判断手段36により自車両2が逸脱傾向にあると判断され、かつ、衝突可能性判断手段38により衝突可能性有りと判断されるという自動制動早期化条件が成立した場合に、衝突判断手段40の判断結果を待つことなく自動制動を実行するものである。
(もっと読む)
制動制御装置
【課題】衝突形態に応じて最適な時間に亘って自動的に制動機構を作動させる。
【解決手段】自車両の衝突を検出する衝突検知センサ2a〜2dと、自車両の車速を検出する車速センサ4とを備え、制駆動力コントロールユニット12は、衝突検知センサ2a〜2dにより自車両の衝突が検出された場合に、当該衝突を検出した後に車速センサ4により検出された車速に基づいて、自動的に制動力を発生させる時間である自動制動時間を制御して、ブレーキ制御装置6を作動させる。
(もっと読む)
衝突被害軽減装置、及びその方法
【課題】交差点における停止線で停止している自車両に後続車両が追突するときに、交差車線、或いは横断歩道に飛び出してしまう可能性を可能な限り低くし、且つ、上述した追突の被害を可能な限り低くできる衝突被害軽減装置、及びその方法を提供する。
【解決手段】後続車両に追突されたときの被害を自車両の制動力を制御して軽減する衝突被害軽減装置であって、自車両が追突されたときに生じるエネルギーを推定する推定手段と、交差点において停車している自車両から予め定められた停止位置までの距離を測定する測定手段と、エネルギーと停止位置までの距離とに基づいて自車両の制動力を予め制御する制動力制御手段とを備える。
(もっと読む)
ブレーキ制御システム
【課題】適切な介入制動を実行可能なブレーキ制御システムを提供する。
【解決手段】車両と車両の周囲の障害物とが衝突するまでに要する衝突予測時間を算出する衝突予測時間算出手段と、衝突予測時間が所定のサービスブレーキ作動閾値以下になった場合、サービスブレーキによる自動介入制動を開始する第2介入制動手段と、衝突予測時間が、サービスブレーキ作動閾値より長いリターダブレーキ作動閾値以下になった場合、リターダブレーキによる介入制動を開始する第1介入制動手段と、リターダブレーキ作動手段によるリターダブレーキの作動中、車両のドライバーにより衝突を回避するための衝突回避操作が実行されたか否かを判定する回避操作判定手段と、衝突回避操作が実行されていないと判定された場合、第2介入制動手段による自動介入制動の開始タイミングを通常より早くするタイミング変更手段とを備えることを特徴とするブレーキ制御システムである。
(もっと読む)
車両の運動制御装置
【課題】
運転者が障害物等を回避する緊急操舵において、迅速な進路変更を可能とすると共に、進路変更後の車両安定性を好適に確保する。
【解決手段】
緊急操舵取得手段(MKQ)が、緊急操舵であることを取得した場合において、制御手段(CTL)は、前輪制動トルク、及び、後輪制動トルクを増加する。緊急操舵が取得された場合(Kqs=1)、前輪制動トルクに対する前記後輪トルクの比率である前後比率(Hzs)を、緊急操舵が取得されない場合(Kqs=0)の前後比率(Cno,Ko)に比較して小さい特性(Ckq,Kp)をもって前輪制動トルク、及び、後輪制動トルクを増加する。さらに、制御手段(CTL)は、後輪制動トルクの時間変化量(Kr)が、前輪制動トルクの時間変化量(Kf)よりも小さくなるように調整する。
(もっと読む)
走行制御装置および走行制御方法
【課題】車両の安全を確保しつつ、車両に走行経路上をより先に進行させることができる走行制御装置および走行制御方法を提供すること。
【解決手段】走行制御装置100は、走行経路RT1を、経路パターンPT1〜PT10に対応する走行経路ごとに区切ってセクションを設定する。そして、車両1が走行経路RT1を自律走行している場合、車両1が現在走行しているセクションのうち、車両1の現在位置からそのセクションの終端までの走行領域を、車両1がこれから通過する予定の領域(通過予定領域)KFと設定し、その通過予定領域KF内に障害物が存在しない間、車両1にセクション内を進行させる。よって、障害物が存在するセクションの手前までは車両1を進行させることができるので、車両1の安全を確保しつつ、車両1に走行経路上RT1〜RT3をより先に進行させることができる。
(もっと読む)
車速制御装置
【課題】ACC制御に依存しすぎないようにするために行われるドライバに対する注意喚起を、当該ドライバの状態に応じて促すことができる車速制御装置を提供する。
【解決手段】本発明の車速制御装置は、車両前方の移動体に電磁波を照射し、当該移動体から反射された反射波を受信することにより上記移動体の移動に関する情報をターゲット情報として算出するターゲット情報算出手段と、上記車両の運転者の顔を撮像し、当該撮像された画像を用いて上記運転者の顔に関する情報を顔情報として算出する顔情報算出手段と、上記ターゲット情報に基づいて上記車両の車速を制御する車速制御手段と、上記車速制御手段によって上記車両が停止するときに上記運転者に対して警告動作を行う警告手段と、上記警告手段が行う上記警告動作の態様を上記顔情報に基づいて変化させる警報変更手段とを備える。
(もっと読む)
衝突被害軽減装置
【課題】衝突被害軽減装置のカーブ路入口走行時の誤動作を抑制する。
【解決手段】レーダーで検出した車両前方の停止物ターゲットが自車線内に所定時間以上存在することを、該停止物ターゲットを衝突被害軽減装置の制御対象となる障害物として認識する条件としたものにおいて、自車のヨーレート(車両の旋回方向への回転角の変化する速度)の単位時間当たりの変動量が所定閾値以上であるときは、カーブ路入口を走行していると判断し、前記所定時間を計測するためのタイマをリセットすることにより、停止物ターゲットを衝突被害軽減装置の制御対象となる障害物として認識することを禁止する。
(もっと読む)
衝突被害軽減装置
【課題】衝突被害軽減装置のブレーキ作動後、所定条件下でブレーキ作動状態を解除する。
【解決手段】ブレーキ作動後、障害物がレーダの死角に入ったか否かを判定する(S6、S7)。障害物が死角に入れば、少なくとも、死角に入ってから測定される車速Vm、並びに、死角に入ってからの経過時間tcに基づいて、障害物までの推定距離Xを演算する(S14、S15)。そして、衝突が検出されず、且つ、推定距離Xが0以下であるときに、死角に入った障害物との衝突を回避できたと判定して、ブレーキ作動状態を解除する(S16、S17、S11)。このため、車両を迅速に通常走行へと復帰させることができる。
(もっと読む)
前面衝突時オーバーラップ量制御装置
【課題】前面衝突時オーバーラップ量制御装置に関し、運転者の操舵操作等による衝突回避の可能性を確保しながら、衝突した場合の運転者の衝突被害を軽減することができるようにする。
【解決手段】自車両2の前方に衝突可能性のある障害物3が検知された場合に自車両2を横移動させ、障害物3との前面衝突時のオーバーラップ量を制御する装置において、自車両前部に運転者以外に乗員がおらず、また、運転者による衝突回避とみなせる操舵操作がなく、また、自車運転席前部Aを含むオーバーラップ部分OLでの障害物3との衝突が予測され、さらに、自車両2を横移動させた際オーバーラップ部分OLのオーバーラップ量がゼロになる回避スペースがあると判断された場合に、上記オーバーラップ量をゼロにする方向に自車両2を横移動させる。
(もっと読む)
衝突安全装置
【課題】本発明は、障害物が存在するエリアを走行する場合でも円滑な走行を可能とする衝突安全装置を提供することを課題とする。
【解決手段】障害物と衝突の可能性のある部位Bに衝突吸収構造を有する移動体に搭載される衝突安全装置1であって、移動体の周辺の障害物を検出する障害物検出手段10,31と、障害物検出手段10,31で障害物を検出した場合に減速制御を行う制御手段33とを備え、制御手段33は、減速制御を行うときの速度の制御値を少なくとも移動体の障害物との衝突部位Bの衝撃吸収性能に応じて設定することを特徴とする。
(もっと読む)
自動車の周囲環境のモニタリング方法
【課題】 自動ブレーキの不適切な作動を防止しながら、1つの進路にしたがって移動することができる自動車の周囲環境をモニタする方法を提供する。
【解決手段】 本発明の方法は、検出センサ、自動車に関するパラメータ、および自動車の周囲環境内にある障害物に基づいて、複数の運転危険度を計算するステップと、障害物が、自動車の進路上にあるか否かを特定するステップと、計算された運転危険度、および自動車の進路上の障害物の特定に基づいて、自動車のブレーキの作動に関する判定を行うステップとを含んでいる
(もっと読む)
車両の制動装置
【課題】車両の衝突を検出する衝突センサと、電動モータにより駆動される電動ブレーキ機構を作動させて車輪制動を行う電動パーキングブレーキ装置と、衝突センサからの信号を基に、電動パーキングブレーキ装置の作動を制御するECUと、を備えた車両の制動装置において、車両が停車中に対象物と衝突した場合における該車両の2次衝突の防止と車室内の乗員保護との両立を図ろうとすることにある。
【解決手段】上記対象物と車両との距離を検出するためのレーザセンサを設けておき、ECUにおいて、該レーザセンサからの信号を基に、該車両に対象物が衝突すると予測したときには、EPB装置の車輪制動力を増加させ、その後に、上記衝突センサにより衝突が検出された後は、EPB装置の車輪制動力を該衝突時の衝撃加速度の大小応じて制御するようにした。
(もっと読む)
ブレーキ制御装置
【課題】電源電圧が低下しても必要な制動力を確保しやすいブレーキ制御装置を提供する。
【解決手段】ブレーキ制御装置は、電源と、運転者の操作に連動して作動液圧が変動する液圧源と、液圧源から作動液の供給を受けて車輪に制動力を付与するホイールシリンダと、液圧源とホイールシリンダとの間に設けられ、液圧源側がホイールシリンダ側よりも高圧であるときの差圧の作用により機械的に開弁され得る制御弁と、制御弁の開閉を制御電流により制御する制御部と、を備える。制御弁は、通常の制動時には、差圧の作用により機械的に開弁されることのないよう設定された規定の制御電流により閉弁される常開型の弁であってもよい。制御部は、電源が低電圧状態にあるか否かを判定し、低電圧状態と判定した場合には規定の制御電流よりも小さい制御電流で制御弁を閉弁してもよい。
(もっと読む)
制動制御装置
【課題】停止後に停止状態を保持する制動制御と、停止後に停止状態を解除する制動制御とを協働して実施できる制動制御装置を提供する。
【解決手段】制動制御装置1は、ECU2に第1制動制御部9と、第2制動制御部10とを備えている。第1制御部9は、車両Mの車速が車速下限値以上のときに、車両Mと対象物との衝突予測を行い、衝突が予測されると、車両Mの制動制御を実施し、制動制御の開始から所定時間経過後に制動制御を解除する。第2制動制御部10は、車両Mの車速が車速上限値以下であるときに、車両Mと対象物との衝突予測を行い、衝突が予測されると、車両Mの停止状態を保持するように車両Mの制動制御を実施する。また、第2制動制御部10は、第1制動制御部9により制動制御が実施された場合に、車速上限値及び衝突予測閾値回数を変更する。
(もっと読む)
1 - 20 / 53
[ Back to top ]