
Fターム[3D246GA22]の内容
ブレーキシステム(制動力調整) (55,256) | 目的、効果−解決課題 (3,487) | 制御精度向上 (516)
Fターム[3D246GA22]の下位に属するFターム
ハンチング防止 (33)
オーバシュート防止 (21)
検出、推定精度の向上 (193)
Fターム[3D246GA22]に分類される特許
1 - 20 / 269
車両の制動制御装置
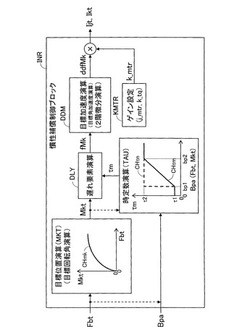
【課題】電気モータによって制動トルクを発生する車両の制動制御装置であって、電気モータの慣性を含む装置全体の慣性の影響を適正に補償し得るものを提供すること。
【解決手段】この装置では、制動操作部材の操作量Bpaに基づいて演算された目標通電量に基づいて電気モータが制御される。ブレーキアクチュエータの応答を表す時定数τmを有する遅れ要素DLY、及び、操作量Bpaに基づいて、ブレーキアクチュエータの慣性の影響を補償する慣性補償通電量Ijt,Iktが演算される。この慣性補償通電量Ijt,Iktに基づいて前記目標通電量Imtが演算される。
(もっと読む)
車両の制動制御装置

【課題】電気モータによって制動トルクを発生する車両の制動制御装置であって、電気モータの慣性を含む装置全体の慣性の影響を適正に補償し得るものを提供すること。
【解決手段】この装置では、制動操作部材の操作量Bpaに基づいて演算された目標通電量に基づいて電気モータが制御される。操作量Bpaに基づいて、ブレーキアクチュエータの慣性の影響を補償する慣性補償制御が必要であるか否かが判定される。慣性補償制御が必要であると判定された場合(FLj←1、又は、FLk←1)、ブレーキアクチュエータの最大応答に基づく予め設定された時系列のパターンCHj,CHkに基づいて、ブレーキアクチュエータの慣性の影響を補償する慣性補償通電量Ijt,Iktが演算される。この慣性補償通電量Ijt,Iktに基づいて前記目標通電量が演算される。
(もっと読む)
車両制御システム
【課題】車両の挙動を安定させること。
【解決手段】車両10の旋回状態量に基づいた前輪Wfl,Wfrの転舵角又は前輪Wfl,Wfr及び後輪Wrl,Wrrの夫々の転舵角の制御により車両10の挙動制御を行う車両制御システムにおいて、旋回走行中で且つ前輪Wfl,Wfr及び後輪Wrl,Wrrの夫々の転舵角が制御されており、更に車両10の旋回状態が所定よりも大きい高G旋回領域にある場合に、前記前輪Wfl,Wfr及び後輪Wrl,Wrrの夫々の転舵角の制御における後輪Wrl,Wrrの転舵角制御の介入度合いを減少させる又は当該後輪Wrl,Wrrの転舵角制御を停止させること。
(もっと読む)
ブレーキ制御装置及びブレーキ制御方法
【課題】ブレーキ距離の延伸を抑制すること。
【解決手段】時刻t2において滑走の発生を検知すると、排気制御を開始し(ブレーキ力の低下)、その後、時刻t3において粘着評価値が再給気開始条件を満たすと、給気を開始する(ブレーキ力の増加)。粘着評価値は、ブレーキ力相当値であるBC圧と、車輪の減速度とから求められる。
(もっと読む)
列車のブレーキシステム
【課題】 列車の滑走が生じた場合でも、列車の後退の誤検知による、誤制御を確実に防止することのできる列車のブレーキシステムを提供する。
【解決手段】 列車1に搭載される車輪4の制動動作を行う機械式ブレーキ装置7と、車輪4の回転量を検出するタコジェネレータ9と、タコジェネレータ9の検出信号が入力される車上装置8と、運転台2の操作に応じて機械式ブレーキ装置7の動作制御を行うとともに、発電ブレーキ動作信号を車上装置8に送る列車制御装置3と、を備えており、車上装置8は、列車制御装置3から発電ブレーキ動作信号が入力された際に、タコジェネレータ9による後退検知信号をマスクして後退検出信号に基づく制御を行わない。
(もっと読む)
車両用姿勢制御装置
【課題】ペダルの踏み込み量、ハンドル操舵量などを考慮して車両の姿勢制御を行うことにより、ドライバの意図するとおりの旋回走行をアシストすることができる車両用姿勢制御装置を提供する。
【解決手段】操舵角δと車速vとに基づいて、車両旋回時の目標横すべり角βsを算出する目標横すべり角演算部151と、操舵角速度δ′、アクセルペダルの踏み込み量A、アクセルペダルの踏み込み速度A′、フットブレーキペダルの踏み込み量Bの中から選択される少なくとも1つに対応して算出される横すべり角補正量Δβを用いて、前記目標横すべり角演算部151によって算出された目標横すべり角βsを補正する目標横すべり角補正部152と、前記目標横すべり角補正部152によって補正された目標横すべり角β*を用いて車両の姿勢制御を行う。
(もっと読む)
電動ブレーキ装置
【課題】ピストンからブレーキ液への荷重入力をより安定化させることができる電動ブレーキ装置を提供する。
【解決手段】モータの駆動力によってピストンを軸方向に駆動することによりブレーキ液圧を発生する電動ブレーキ装置において、モータの駆動力をピストンに伝達するための駆動力伝達機構は、モータの回転駆動力を受けることにより回転するナット80cと、ナット80cと係合して軸方向に移動可能に設けられると共にピストンを押圧するボールねじ軸80aとを備え、ボールねじ軸80aの回り止めのためのピン220がボールねじ軸80aに設けられ、ピン220をボールねじ軸80aの軸方向に対して移動可能に支持する摺動溝211を備えたスリーブ210が、駆動力伝達機構を収容するハウジング171のカバー173に設けられている。
(もっと読む)
車両の制御装置
【課題】車両がストール状態のときに電動機に駆動電流を供給する電源電力供給回路の負担を軽減するとともに、ブレーキ装置の状態に関わらず安定的に車両の後退を抑制して、商品性の向上を図ることができる車両の制御装置を提供する。
【解決手段】ストール状態であると判定された状態で、電源電力供給回路の温度が所定値以上の温度に上昇したときに、電動機の出力トルクを減少させるようにモータトルク指令値を生成すると共に、ブレーキ装置の制動力を、電動機の出力トルクの減少分と等価な制動力で増加させるようにブレーキトルク指令値を生成する処理を実行すると共に、該ブレーキトルク指令値を生成する処理を実行しているときに車両の後退が検出された場合に、車両が後退しなくなるまでブレーキトルク指令値を補正する。
(もっと読む)
電子制御装置
【課題】回路基板からカバー部材に伝達された電気ノイズを効果的に低減し得る電子制御装置を提供する。
【解決手段】アルミ合金製の液圧制御ブロック3及びカバー部材4と、液圧制御機器類を駆動するパワー電子回路を有する合成樹脂材のバスバー構成体11と、バスバー構成体を介して液圧制御機器の駆動を制御するプリント基板12とを備え、このプリント基板をバスバー構成体に固定するねじ部材19の頭部19a側に固定されたアースプレート25の上端部を、カバー部材の下面4dに弾接させる一方、ねじ部材の軸部19b下端部側に設けられたアーススプリング26の下端縁26aを、ソレノイドケース8の上面に弾接させて、前記カバー部材と液圧制御ブロックとを電気的に導通させた。
(もっと読む)
車両のエンジン自動停止制御装置
【課題】 走行中においても適切なエンジン停止及び再始動を達成可能な車両のエンジン自動停止制御装置を提供すること。
【解決手段】 本発明の車両のエンジン自動停止制御装置では、走行中に運転者がブレーキペダルを所定の閾値以上操作したときにエンジンを停止するにあたり路面摩擦係数が小さいほど所定の閾値を大きくすることとした。
(もっと読む)
車両用制動支援装置
【課題】坂路にて自車両の停止中に自動制動の制動力を解除した際に、自車両の動作が運転者が意図しないものになることを防止する。
【解決手段】車両用衝突回避制動支援装置1は、障害物との接近に関するリスクポテンシャルを算出するリスクポテンシャル演算部31と、走行路の勾配を検出する外乱推定部32と、自車両が停止中に、リスクポテンシャルに基づき自車両に付与した制動力を解除する際のその減少度合いを、リスクポテンシャル及び走行路の勾配に基づいて変更する制動力演算部40とを備える。
(もっと読む)
車両制御装置、車両制御プログラム、および車両制御方法
【課題】車両の運動状態を制御する車両制御装置において、より車両の安定性を向上させることができるようにする。
【解決手段】車両制御システムにおいては、外部力推定部40としての機能を利用して、当該車両の走行に伴って外部から受ける力を表す路面反力、路面の摩擦抵抗、車輪荷重、上下方向反力等の外部力を推定し、タイヤモデル制御部51、サスアームモデル制御部52、スプリング&ダンパモデル制御部53としての機能を利用して、駆動トルク、操舵力、ブレーキ油圧、および外部力に基づいて、制御対象部の運動状態を示す速度や加速度等のパラメータを推定する。そして、各モデル制御部51〜53としての機能を利用して、パラメータが予め設定された目標範囲内になるように、駆動トルク、操舵力、ブレーキ油圧等を補正する。
(もっと読む)
電動パーキングブレーキ装置
【課題】通常の使用時においての解除時間が長くなく、走行中の電動パーキングブレーキを作動させた場合においても確実に解除できる電動パーキングブレーキ装置を提供すること。
【解決手段】ステップS1において、パーキングブレーキを作動させる場合には、ステップS2に移行してアクチュエータを作動させる。ストロークセンサからの測定されたストローク値を制御部が取り込んで記憶部に作動ストローク値として記憶する。ステップS3において、作動時の車両の車速が0km/hか、あるいは車速が0km/hより大きいかを車速センサからの信号により車速判断部が判断をする。車両が走行していると判断した場合には、ステップS5に移行し、制御部はパーキングブレーキを解除させるための解除ストローク目標値を、実際の作動ストローク値の値として解除制御する。
(もっと読む)
自動車の回生制動システム
【課題】制動制御の正確度を向上させることができ、構造が簡単で、製造費が安作動効率を向上させることができる自動車の回生制動システムを提供する。
【解決手段】本発明の実施例による自動車の回生制動システムは、油圧で作動する自動車の回生制動システムにおいて、運転者の操作によって直接的に油圧を生成する第1シリンダー、自動車の制動に必要な油圧を生成して、ホイールに伝達する第2シリンダー、運転者が要求する制動力を認識して、油圧を生成する油圧生成器、及び前記第1シリンダーで生成された油圧を前記第2シリンダーに選択的に供給するように、前記第1シリンダーと前記第2シリンダーとの間に挿入される第1バルブ、を含むことを特徴とする。
(もっと読む)
電動ディスクブレーキ装置
【課題】電動ディスクブレーキ装置におけるロータ振れの発生を検知する。
【解決手段】車輪とともに回転するディスクロータの車両内側および車両外側の摩擦摺動面に相対して、インナ側ブレーキパッドおよびアウタ側ブレーキパッドがそれぞれ配置される。電動モータ30は、駆動機構を介してインナ側ブレーキパッドおよびアウタ側ブレーキパッドをディスクロータの摩擦摺動面に押し付ける。第1押付力検出部62aは、インナ側ブレーキパッドの摩擦摺動面への押付力を検出する。第2押付力検出部62bは、前記アウタ側ブレーキパッドの前記摩擦摺動面への押付力を検出する。モータ制御部68は、第1押付力検出部62aおよび第2押付力検出部62bの検出信号に基づいて、電動モータ30によるインナ側ブレーキパッドおよびアウタ側ブレーキパッドの押付力を制御する。
(もっと読む)
加減速度制御装置、加減速度制御方法
【課題】アクセル操作子にブレーキ操作子の機能を統合した場合の減速操作性を向上させる。
【解決手段】操作量Saに応じて目標加減速度Gaを設定し、操作量Sbに応じて目標加減速度Gbを設定する。そして、目標加減速度Ga設定手段で設定した目標加減速度Gaと目標加減速度Gb設定手段で設定した目標加減速度Gbとを加算した目標加減速度に応じて、車両の加減速度を制御する(S104、S105)。そして、統合操作制御モードの場合(S101の判定が“No”)、操作量Saが0よりも大きな閾値thであるときには目標加減速度Gaを0とし、操作量Saが閾値thよりも小さいほど目標加減速度Gaの実数を負側に小さくする(S106)。また、操作量Sbが大きいほど目標加減速度Gbの実数を負側に小さくする(S107)。
(もっと読む)
車両用減速度制御装置、車両用減速度制御方法
【課題】運転者のブレーキ操作を支援しつつ、減速度の変動を抑制する。
【解決手段】運転者がブレーキ操作を行ったときに、エンジンブレーキによる減速度をライズアップ率Rrで増加させる。そして、減速度をライズアップ率Rrで増加させてから予め定められた時間が経過したら、この時点の減速度から減速度をライズアップ率Rrよりも小さなビルドアップ率Rbで増加させる。また、エンジン被動側の動力伝達状態が、定常状態から低減し、その後、再び定常状態へと復帰したら、減速度の増加率を減少補正する。変速機の変速位置がDレンジからNレンジへ変化したことを検出したときに、動力伝達状態が定常状態から低減したと判断する。また、その後、変速位置がNレンジからDレンジへと復帰したことを検出したときに、再び定常状態へ復帰したと判断する。
(もっと読む)
車両用制動制御装置
【課題】従来よりも適切な車両の制動制御を可能とする車両用制動制御装置を提供する。
【解決手段】自車両と障害物との衝突の危険性に応じて自動的に車両を制動する車両用制動制御装置であって、自車両と障害物との衝突の危険性が高いか否かを判定する衝突判定手段と、衝突判定手段によって自車両と障害物との衝突の危険性が高いと判定された場合、自車両に自動的に制動力を発生させる自動制動手段と、自動制動手段が発生させる制動力の大きさを自車両のドライバーの操舵操作に応じて漸減する制動力漸減手段とを備え、制動力漸減手段は、制動力の漸減速度を自車両のドライバーのアクセル操作に応じて速くすることを特徴とする。
(もっと読む)
車両のブレーキ制御装置
【課題】一例として自動二輪車1のような車両の制動時に車輪2,3のロックを防止するように、当該車輪2,3に付与するブレーキ力を調整するABS制御において、それらの車輪2,3のロック傾向を直接的に検出し、より適切なABS制御の介入判定を行えるようにする。
【解決手段】車輪2,3の回転速度である車輪速度Vf,Vrの低下率ΔVf,ΔVrが所定の閾値以上であることを含む、ABS制御の介入条件が成立したか否かを判定する(第1および第2の判定部54,55)。介入条件が成立したと判定すればABS制御を開始する(ABS制御部56)。
(もっと読む)
ブレーキ液圧制御装置とそれを用いたブレーキ装置
【課題】前輪系と後輪系のうち一方のみの液圧を制御する小型化やコスト面で有利なブレーキ液圧制御装置の利点を活かしつつ、そのブレーキ液圧制御装置の減圧の応答性を向上させることを課題としている。
【解決手段】マスタシリンダ3とホイールシリンダ4との間に、増圧用電磁弁7と、その増圧用電磁弁と並列配置にして液圧経路6につなぐ還流経路8と、減圧用電磁弁9と、ホイールシリンダ4から排出されるブレーキ液を直接汲み上げて液圧経路6に還流させる複数のポンプ10と、各ポンプを一括して駆動するータ11と、電子制御装置12とを設け、各ポンプ10を、動作行程の位相を異ならせて還流経路に並列配置にして組み込み、このブレーキ液圧制御装置で自動2輪車又は自動3輪車の前輪系又は後輪系のブレーキ液圧のみを制御するようにした。
(もっと読む)
1 - 20 / 269
[ Back to top ]