
Fターム[3D246HC07]の内容
ブレーキシステム(制動力調整) (55,256) | 推定ロジック (525) | 時間領域での推定 (86) | 予測値を使うもの (22)
Fターム[3D246HC07]に分類される特許
1 - 20 / 22
運転操作予測装置
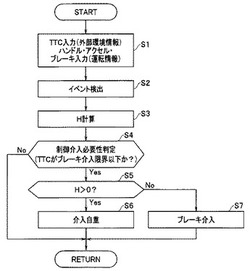
【課題】ドライバのハンドル回避操作前の準備操作を検出することにより、限定的な状況下でのドライバのハンドル回避意思を高精度に予測する。
【解決手段】外部環境イベント及び運転操作イベントを検出し(S2)、外部環境イベントと運転操作イベントとの時間関係にルールが反応したとき、そのルールの結論に応じて重みを加算或いは減算することにより、ハンドル回避意思推定値Hを計算する(S3)。そして、制御介入の必要性を判定し(S4)、制御介入の必要性がある場合、ハンドル回避意思推定値Hの値を参照する(S5)。その結果、H>0の場合には、ドライバのハンドル操作による回避意思が高いものと判断して制御介入しない或いは介入を遅らせる等して制御介入を自重し(S6)、一方、H≦0の場合には、ドライバのハンドル操作による回避意思が低いものと判断してシステムによるブレーキ介入を実行させる(S7)。
(もっと読む)
衝突回避装置

【課題】ユーザーが煩わしさを感じることのないPCS制御を行うことのできる衝突回避装置を提供する。
【解決手段】検出手段と、検出された物体を衝突判断対象物とし、当該衝突判断対象物と自車両とが衝突する可能性を判断する衝突判断手段と、衝突判断対象物と自車両との衝突を回避するための衝突回避制御を行う制御手段と、衝突回避制御を解除する解除手段と、自車両の位置を示す情報および自車両の車両情報の少なくとも一方の情報を取得する車両情報取得手段と、衝突回避制御の態様を変更する変更手段と、解除手段によって衝突回避制御が解除されたときの自車両の位置を示す情報を解除時位置情報として、解除手段によって衝突回避制御が解除されるときの自車両の車両情報を解除時車両情報として車両情報取得手段から少なくとも一方を取得し記憶する記憶手段とを備える。
(もっと読む)
衝突回避制御装置及び方法
【課題】衝突回避制御が実行中で自車両が完全に停止する前でも、自車両が対象物に衝突する可能性がなくなった時点で衝突回避制御を終了し、速やかに通常の走行状態に戻すことが可能な衝突回避制御装置を提供する。
【解決手段】衝突回避制御が実行中で、かつ対象物が移動物である場合、自車両と対象物との相対速度が予め定めたゼロ以上の閾値を超えるか否かが判断される。この相対速度が当該閾値未満の間は衝突回避制御が継続して実行され、この相対速度が当該閾値以上になったタイミング、すなわち自車両の走行速度が対象物の走行速度よりも遅くなったタイミングで衝突回避制御が終了する。
(もっと読む)
液圧ブレーキシステム
【課題】ブレーキシステムの自己診断機能において、作動液の温度が低下している状況下における誤検出を防止する。
【解決手段】走行中において、動力式液圧源装置によって発生させられる液圧が閾液圧PBより低い状態が閾継続時間TB以上続いた場合に、ブレーキシリンダへの作動液の供給を、動力式液圧源装置からマスタシリンダ装置に切り換えるように構成されたブレーキシステムを、作動液の温度が設定温度より低下していると推定される場合に、閾液圧を低い値PB'することと、閾継続時間を長い値TB'とすることとの少なくとも一方を行うように構成する。作動液の温度が設定温度より低下している状況下において、誤って動力式液圧源装置の異常と診断されることを回避することが可能である。
(もっと読む)
車両運動制御システム
【課題】車両安定性の低下を簡易に予測できる車両運動制御システムを提供すること。
【解決手段】この車両運動制御システム1は、車輪速度、車体速度、前後加速度および横加速度、実ヨーレート、操舵角、アクセル開度、ブレーキ踏力など車両状態量に基づいて、耐ロールオーバー制御、US/OS抑制制御などの車両運動制御を行う制御装置5を備えている。また、制御装置5は、現在の車両状態量と、車両状態量の履歴および車両運動制御の実施履歴を含む過去の制御履歴とに基づいて、将来的な車両安定性の低下を予測する安定性低下予測部53を有している。
(もっと読む)
自動ブレーキ装置
【課題】自動ブレーキの不要な作動をより早い段階で抑制する。
【解決手段】ブレーキ機構2を作動させるアクチュエータ3と、アクチュエータ3の作動を制御する制御手段1とを備えた自動ブレーキ装置において、車両の前方を走行する先行車両の情報を検出する車両前方情報検出手段4,5と、前方情報に基づき車両と先行車両とが衝突する可能性を予測する衝突予測手段1aと、前方情報に基づき、先行車両が車両の走行領域から外れるか否かを予測する先行車両走行予測手段1bと、車両と先行車両とが衝突を回避できるか否かを判定する衝突回避判定手段1cと、を備える。制御手段1は、衝突予測手段1aにより衝突可能性があると予測されたら、衝突回避判定手段1cにより衝突を回避できると判定されない限りアクチュエータ3を作動させ、衝突を回避できると判定されたら、アクチュエータ3を非作動にする。
(もっと読む)
衝突被害軽減装置、及びその方法
【課題】交差点における停止線で停止している自車両に後続車両が追突するときに、交差車線、或いは横断歩道に飛び出してしまう可能性を可能な限り低くし、且つ、上述した追突の被害を可能な限り低くできる衝突被害軽減装置、及びその方法を提供する。
【解決手段】後続車両に追突されたときの被害を自車両の制動力を制御して軽減する衝突被害軽減装置であって、自車両が追突されたときに生じるエネルギーを推定する推定手段と、交差点において停車している自車両から予め定められた停止位置までの距離を測定する測定手段と、エネルギーと停止位置までの距離とに基づいて自車両の制動力を予め制御する制動力制御手段とを備える。
(もっと読む)
運転支援装置
【課題】本発明は、運転支援のための各種のデバイスに故障が発生した場合であっても適切な運転支援を実現する。
【解決手段】運転支援装置1は、車両の運転者に対して、車両の運転におけるリスクの対象となる対象物を回避するために、対象物及び車両の状況に応じて算出された衝突余裕時間及び対象物が車両の予測進路上に移動する可能性の度合いを示す推定危険度に基づき運転支援形態を判定し、判定された運転支援形態に基づき運転支援のための1つ以上のデバイスを制御することにより運転支援を実施する装置であって、デバイスの故障を検出する故障検出部20と、デバイスによる運転支援が安全に寄与する度合いを示す値である安全寄与率と、故障検出手段により検出された故障デバイスに関する情報とに基づき推定危険度を増加させる危険度増分値算出部12、推定危険度判定部13とを備える。
(もっと読む)
車両の制動力制御装置
【課題】 車両の制動装置の大型化をすることなく、高制動負荷時の制動性能の要求に対応すべく、制動力の配分が変更されるよう構成された制動力配分制御を提案すること。
【解決手段】 本発明の制動力制御装置は、制動実行処理の間隔及び回数に基づいて高制動負荷状態であるか否かを判定する判定手段と、高制動負荷状態であるとの判定が為されたときに車両の前後輪制動力配分を変更する配分制御手段とを含む。高制動負荷状態は、例えば、所定の制動力を超える制動力を要求する制動実行処理と所定の駆動力を超える駆動力を要求する駆動実行処理とを交互に実行する場合であって、制動実行処理が所定時間より短い制動実行間隔にて所定回数を超える回数実行されたことをもって検出されてよく、前後輪制動力配分の変更は、前輪の制動力の低減と後輪の制動力の増大により為されてよい。
(もっと読む)
走行支援装置
【課題】車両前方の障害物に関する情報を、道路状況に応じて適切なタイミングで提供する。
【解決手段】障害物の発生位置に基づき目標停止位置Xstopを算出し(ステップS21)、道路形状に基づき自車両が目標停止位置Xstopに至るまでの車速パターンを作成し、この車速パターンで走行する際の運転者の操作負荷量Wloadを、加減速負荷量、操舵負荷量等の身体負荷量と、前方注視負荷量、確認負荷量等の認知負荷量とから予測する(ステップS22)。操作負荷量Wloadがしきい値を超える区間を運転負荷増大区間とし、この区間に目標停止位置Xstopに基準減速度Ginfoで停止するための情報提供位置Xinfoが含まれる場合には、運転負荷増大区間の開始点から所定量だけ自車両よりの位置での車速に基づき、自車両が目標停止位置Xstopに停止するための必要減速度Greqがしきい値を超えているかを判定し、しきい値をこえているときに障害情報の提供を行う。
(もっと読む)
運転支援装置
【課題】、方向指示器を作動させた特定車両の挙動を高精度に予測する運転支援装置を提供することを課題とする。
【解決手段】方向指示器を作動させた特定車両(例えば、先行車両)についての旋回タイミングを予測する運転支援装置であって、特定車両の周辺に存在する周辺車両(例えば、先先行車両)の位置を取得する周辺車両位置取得手段と、特定車両が方向指示器を作動させた際の周辺車両の位置に応じて特定車両の旋回タイミングを予測する予測手段を備えることを特徴とし、周辺車両の特定車両との相対距離及び相対速度の少なくとも一方の相対情報を取得する相対情報取得手段を備え、予測手段は、周辺車両の特定車両との相対情報を用いて特定車両の旋回タイミングを予測すると好適である。
(もっと読む)
車両用ブレーキ液圧制御装置
【課題】減圧量の変動があっても、ブレーキフィーリングが大きく変化しないようにする。
【解決手段】車両用ブレーキ液圧制御装置は、液圧源側から車輪ブレーキへの液圧路に配置され、通電量によって閉弁力が調整可能な常開型比例電磁弁と、車輪ブレーキから液圧源への液圧路に配置された常閉型電磁弁と、常開型比例電磁弁および常閉型電磁弁への通電量を制御することで、車輪ブレーキ内の液圧を増圧状態、保持状態または減圧状態に切り替える制御を行う制御手段と、を備える。制御手段は、減圧状態または保持状態から増圧状態へと移行する場合に、折れ点目標液圧まで第1の勾配PG1で増圧させるとともに、折れ点目標液圧から増圧終了まで第1の勾配PG1より緩い第2の勾配PG2で増圧させるように制御し、折れ点目標液圧PBを、減圧開始圧PRから所定のオフセット圧PSを減算することで決定する。
(もっと読む)
液体量推定装置及び車両の運動支援装置
【課題】第1制動部材と第2制動部材との間に存在する液体の液体量を好適に推定できる液体量推定装置及び車両の運動支援装置を提供する。
【解決手段】車両には、車輪と共に回動するブレーキロータと、該ブレーキロータに摺接可能なブレーキパッドとが搭載されている。そして、ECUは、降水時に、車両の車体速度VSを演算し(ステップS13)、ワイパの作動速度Vwpを特定する(ステップS14)。続いて、ECUは、車体速度VS及び作動速度Vwpに応じて、ブレーキロータに付着する水分膜の所定周期での成長量ΔWを推定し(ステップS15)、所定周期毎の成長量ΔWを積算して水分膜厚Wを求める(ステップS16)。
(もっと読む)
走行制御装置
【課題】状況に応じた適切な制御によって障害物との衝突の発生及び二次衝突の発生を回避できる走行制御装置を提供する。
【解決手段】走行制御装置1では、自車両が障害物と衝突する可能性があると判断したときに減速制御を実行し、自車両と障害物との衝突の発生を回避する。また、走行制御装置1では、周辺環境情報に基づいて定められる作動条件として、減速制御の実行開始から所定時間が経過するまでに実際に衝突が発生した場合、或いは自車両が交通弱者との衝突の可能性が他の場所に比べて高い交差点付近に位置している場合には、減速制御を開始してから所定時間が経過した後も減速制御を維持する。したがって、走行制御装置1では、状況に応じた適切な減速制御が実行され、二次衝突の発生を精度良く回避できる。
(もっと読む)
走行制御装置、及び走行制御方法
【課題】自車両の車線変更などの横移動を抑制するタイミングを最適化する。
【解決手段】自車両の側方に存在する側方物体を検出し(ステップS3)、走行車線に対して自車両が車頭時間Tt後に到達する後刻横位置Xfを推定し、側方物体を検出している状態で、後刻横位置Xfが所定横位置XLに達したときに、側方物体の側への自車両の車線変更を抑制するものであって、走行車線に対する自車両の現在横位置Xeを検出し(ステップS6)、この現在横位置Xeが側方物体に近いほど、後刻横位置Xfが所定横位置XLに達しやすくなるように、後刻横位置Xfを補正する。すなわち、現在横位置Xeが側方物体に近づくほど、1よりも大きい値になる補正ゲインαを算出し(ステップS7)、推定した後刻横位置Xfに補正ゲインαを乗じることで、この後刻横位置Xfを補正する(ステップS8)。
(もっと読む)
走行制御装置、及び走行制御方法
【課題】前方の障害物などを操舵回避する際の、無用な制御介入を制限する。
【解決手段】自車両の側方に存在する側方物体を検出し(ステップS3)、走行車線に対して自車両が車頭時間Tt後に到達する後刻横位置Xfを推定し、側方物体を検出している状態で、後刻横位置Xfが所定の閾値XLに達したときに、側方物体の側への自車両の車線変更を抑制するものであって、自車両が側方車両の側とは逆方向に横移動することを検知したら回避フラグをFa=1にセットし(ステップS6)、その後、今度は側方車両の側に横移動を開始したら復帰フラグをFr=1にセットする(ステップS7)。こうして復帰フラッグがFr=1にセットされたら、設定時間Tmが経過するまで抑制フラグをF=0にリセットし、横移動の抑制を禁止する(ステップS9)。
(もっと読む)
車輪速度演算装置
【課題】車輪速度センサから出力されるパルス信号のエッジに基づいて、車輪速度を演算する車輪速度演算装置において、エッジが未検出である場合に、実際の車輪速度の変化を反映させつつ、そのエッジが未検出である間の車輪速度を推定することができる車輪速演算装置を提供すること。
【解決手段】車輪の推定移動距離Dnに基づいて、エッジが未検出である期間における車輪速度を推定する。この車輪の推定移動距離Dnは、エッジが検出された時点の車輪速度におけるトレンドの変化線の傾きAnを考慮して推定されるので、実際の走行に近い状態で距離を推定できる。そして、この推定移動距離Dnを用いて、次のエッジが検出されるタイミングを予測し、そのタイミングを考慮して、エッジが未検出である期間における車輪速度を推定すれば、その推定に、実際の車輪速度の変化を反映させることができる。
(もっと読む)
衝突軽減装置
【課題】衝突を軽減または回避するためにより的確なブレーキ制御を行う。
【解決手段】衝突軽減装置は、自車両が他車両と衝突すると推定された場合にブレーキ制御を行うことによって衝突を軽減または回避する。具体的には、衝突軽減装置は、他車両が衝突すると予想される自車両の位置である衝突部位を推定するとともに、自車両に対して他車両が衝突する衝突角度を推定する。次に、衝突軽減装置は、他車両が自車両を突き抜けた場合における突抜部位を衝突部位および衝突角度から推定する。ブレーキ制御の内容(例えばブレーキを開始するタイミング)は、衝突部位および突抜部位に基づいて決定される。
(もっと読む)
車両の衝突被害軽減装置
【課題】運転者の混乱を招き車両の挙動が不安定になる事態を避けることが出来るようにする。
【解決手段】 車両と衝突する可能性のある障害物が継続的に検出されている期間を検出継続期間ΣTDとして算出する検出期間算出手段16と、検出継続期間ΣTDに応じて障害物を監視対象とするとともに装備品12,13の作動対象にするか否かを決定する監視対象認定手段17と、検出継続期間ΣTDが所定の検出期間閾値TDth1,TDth2,TDth3よりも大きくなると障害物に対する衝突可能性が有ると判定し信頼度指数Rを設定する信頼度指数設定手段18と、運転者の注意力が低下するに連れて小さくなる注意力指数ALを設定する注意力指数設定手段32と、注意力指数ALが小さくなるに連れて検出期間閾値TDth1,TDth2,TDth3を増大補正する検出期間閾値補正手段33とを備えて構成する。
(もっと読む)
車両の走行制御装置及び車両の走行制御方法
【課題】制動条件の異なる2以上の制御モードを協調して車両を走行制御する際に、制御モードの切替を適切に行うことを可能とする。
【解決手段】互いに異なる制動条件で車両を制駆動制御する2以上の制御モードを協調制御して、走行状態に基づき採用する制御モードを切り替える車両の走行制御装置4である。走行路の勾配の状態に応じて、カーブ減速制御モードから一定速制御モードへの切替の閾値を変更する。具体的には、下り勾配であるほど、上記閾値を高くする。
(もっと読む)
1 - 20 / 22
[ Back to top ]