
Fターム[3D246JB49]の内容
ブレーキシステム(制動力調整) (55,256) | 制御方法 (3,867) | フィードバック制御 (223) | 制御ゲイン (28)
Fターム[3D246JB49]に分類される特許
1 - 20 / 28
車両挙動制御装置
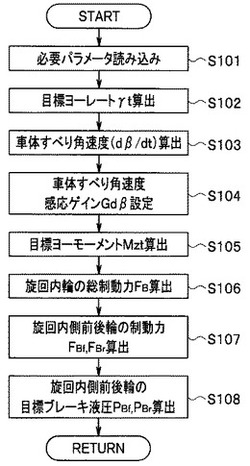
【課題】ブレーキによるヨーモーメント制御のハンチングの発生を抑制し、滑らかな車両挙動で、制御精度を向上する。
【解決手段】車両の運転状態に基づいて車両の目標ヨーレートγtを算出し、車体すべり角速度に基づいて車体すべり角速度感応ゲインGdβを設定し、ヨーレート、γt、Gdβに基づいて目標ヨーモーメントMztを算出し、旋回内側前後輪に付加する目標ブレーキ液圧算出する。ここで、車体すべり角速度感応ゲインGdβは、目標ヨーモーメントMztの値が、タイヤのグリップ限界を超えるヨーレートを発生させる値とならないように、車体すべり角速度の絶対値に応じて目標ヨーモーメントMztを減少補正する補正ゲインとなっているが、この減少補正の際、目標ヨーモーメントMztを0としてしまわないように、0よりも大きな値を下限値として減少補正する。
(もっと読む)
車両用液圧ブレーキシステム

【課題】ABS制御実行時におけるABS弁装置の作動による供給圧の変動を抑制することが可能な車両用液圧ブレーキシステムを提供する。
【解決手段】ブレーキ操作に応じて決定された目標供給圧P*に基づいて液圧源装置が有する増圧用電磁弁および減圧用電磁弁への供給電流が制御されるように構成され、ABS制御が実行されている場合において、実行されていない場合に比較して、増圧用電磁弁の開弁圧が高くなるように、例えば、ブレーキ操作に応じた目標供給圧P*に補正圧αpを加えて補正して、その補正された目標供給圧P*+αpに基づいて増圧用電磁弁と減圧用電磁弁とへの供給電流が制御されるようにすることで、その増圧用電磁弁に供給する電流を変更するように構成する。ABS実行中において高圧源の液圧と供給圧Prとの差圧を小さくするため、ABS弁装置の作動による供給圧の変動を抑制することができる。
(もっと読む)
車両状態量推定装置
【課題】車両の挙動制御時における挙動の急変を抑制することのできる車両状態量推定装置を提供すること。
【解決手段】車両1の挙動制御に用いる目標横加速度Gytを車両1の走行時における横加速度実測値Gysと横加速度推定値Gyeとに基づいて推定する車両状態量推定装置2において、横加速度実測値Gysと横加速度推定値Gyeとに基づいて目標横加速度Gytを推定する場合には、車両1の横滑りの状態に応じて横加速度実測値Gysと横加速度推定値Gyeとに重み付けを行うことにより推定すると共に、横滑りが所定値以上になった場合には横滑りの状態に関わらず横加速度実測値Gysの重み付けが大きい状態を維持し、横加速度実測値Gysと横加速度推定値Gyeとの差が所定値以下の状態が所定時間継続した場合に、横加速度実測値Gysの重み付けが大きい状態を解除する。
(もっと読む)
車両制御装置
【課題】 カーブの走行安定性をより高めることができる車両制御装置を提供する。
【解決手段】 先行車と自車との相対関係を維持または設定された速度を維持するように自車の速度を制御するACC制御のACC指令値Gaccを演算するACC指令値演算部201と、自車に作用する横加加速度Gy'に基づき自車の速度を制御するGFC制御のGFC指令値Ggfcを演算するGFC指令値演算部202と、ACC指令値GaccまたはGFC指令値Ggfcのうち車両に作用する減速度の大きな指令値を選択する指令値選択部203と、選択されたACC指令値GaccまたはGFC指令値Ggfcに基づいてブレーキ液圧ユニット101およびエンジン121を駆動し自車の速度を制御する速度制御部204と、を備えた。
(もっと読む)
運動量制御装置
【課題】 制御対象の運動状態が安定するように設定されたフィードバックゲインを用いて制御対象の運動量をフィードバック制御する運動量制御装置を提供すること。
【解決手段】 運動量制御装置は、複数のアクチュエータのうちの一つのアクチュエータを単独で作動させることにより制御対象の運動量をフィードバック制御した場合に用いる最適フィードバックゲインを、複数のアクチュエータのそれぞれが単独で作動した場合についてそれぞれ取得する最適フィードバックゲイン取得部と、最適フィードバックゲイン取得部により取得された複数の最適フィードバックゲインのうち最小のフィードバックゲインを制御系のフィードバックゲインとして設定するフィードバックゲイン設定部とを備える。
(もっと読む)
車両の制動制御装置
【課題】 車両の旋回挙動を安定して制御可能な車両の制動制御装置を提供する。
【解決手段】 コントロールユニット3は、車両のアンダーステア傾向を抑制するヨーモーメントを車両に付加すべく車両の旋回内輪の前後輪を制御対象輪として制動力を付与する制動力制御手段(前後目標ヨーモーメント算出部23、各輪目標制動力算出部24および液圧制御装置4)と、操舵速度dθを検出する操舵速度検出手段と、操舵速度dθが高いほどフロントヨーモーメント配分を大きくするヨーモーメント配分算出部22と、を備える。
(もっと読む)
車両の制駆動力制御装置
【課題】 制駆動力を制御することにより、ピッチ挙動やを抑制するとともに上下方向振動を適切に抑制する車両の制駆動力制御装置を提供すること。
【解決手段】 電子制御ユニット30は、車両Ve(より具体的には車体Bo)に発生したピッチ挙動を抑制するピッチ制御の実行中において、上下加速度センサ33から信号を入力し、車体Boの上下加速度Azを検知する。そして、ユニット30は、ピッチ制御に伴って各輪11〜14に発生させる駆動力Fの分力として推定されて車体Boに入力される上下力Fzと検知した上下加速度Azのそれぞれの作用方向が同一方向(振動増幅方向)であるときには各輪11〜14に発生させる駆動力Fを低減または「0」に制御する。一方、作用方向が互いに異なる方向(振動減衰方向)であるときには、駆動力Fを、上下力Fzと上下加速度Azとを用いて決定されるゲインKを乗算して補正する。
(もっと読む)
車両制御システム
【課題】ドライバの覚醒度が低い場合であっても、車両挙動制御装置本来の性能を十分に発揮させることができる車両制御システムを提供すること。
【解決手段】車両の挙動を制御する車両挙動制御装置を備えた車両制御システムSにおいて、障害物が接近したときに当該障害物との接触を回避するために前記車両挙動制御装置を制御する障害物回避制御手段と、前記障害物との接触を回避した後に前記車両の挙動を安定化させるために前記車両挙動制御装置を制御する車両安定化制御手段と、ドライバの覚醒度を判定する覚醒レベル判定部32と、を備え、前記障害物回避制御手段は、前記覚醒レベル判定部32により判定された覚醒度が低いときほど前記車両挙動制御装置の制御量を増大させ、前記車両安定化制御手段は、前記覚醒レベル判定部32により判定された覚醒度が低いときほど前記車両挙動制御装置の制御量を減少させる。
(もっと読む)
車両運動制御装置
【課題】加減速が不要なシーンで、横運動に連係した前後加速度制御の介入を抑制し、走行シーンに対するロバスト性を向上させることができる車両運動制御装置を得ること。
【解決手段】自車両情報取得手段1により検出したドライバ入力情報等に基づいて車輪制駆動トルクアクチュエータ3やブレーキランプ4を制御する車両運動制御演算手段2は、車両に横運動を発生させる操舵操作情報、もしくは車両に発生した横運動情報の少なくとも一つに基づいて車両に発生させる前後加速度指令値を演算する前後加速度指令値演算部7と、前記操舵操作情報および前記横運動情報に基づいて前記前後加速度指令値を補正する前後加速度指令値補正演算部8を備える。
(もっと読む)
加速度制御装置
【課題】アダプティブクルーズ制御装置に用いられる加速度制御装置において、過渡状態における自車両の乗り心地を向上させること。
【解決手段】FBトルクゲイン補正部31は、自車両の走行状態が、走行中状態から停止直前状態、もしくは停止中状態から発進直後状態へと切り替わると、FBトルクゲインを第2設定値に変更する。これと共に、その停止直前状態、もしくは発進直後状態である間、FBトルクゲインを第2設定値に維持する。この第2設定値は、第1設定値よりも小さな値であるため、FBトルクゲインが第1設定値から第2設定値へと切り替えられると、FBトルク制御部30によって実行されるフィードバック制御についての応答遅れが大きくなる。これにより、過渡状態である場合のFB制御量は、時間の進行に対して緩やかに変更され、FB制御によって発生される制動トルクや駆動トルクが大きく変化することを防止できる。
(もっと読む)
車両挙動制御装置
【課題】路面状況が異なっていても安定した旋回性能が得られるとともに、制動手段の過熱抑制とブレーキパッドの過度な磨耗を防止可能な車両挙動制御装置を提供する。
【解決手段】本発明にかかる車両挙動制御装置は、車両1の前輪左右輪6L、6Rへ制動液圧Pが付与されることで各車輪に個別に制動力を与える制動手段10L,10Rと、車輪速度(V)を検知する速度検知手段31〜34と、前輪を操舵するステアリング14の操舵角(θ)を検知する操舵角検知手段36と、前輪のスリップ率(Sf)を導出するスリップ率算出手段41と、スリップ率算出手段で導出されたスリップ率(Sf)が大きくなるほど、制動手段10L,10Rによる制動力が大きくなるように、制動手段10L,10Rの制動液圧(P)を制御する制御手段30を有する。
(もっと読む)
車両運転支援装置及び車両運転支援方法
【課題】運転者に与える違和感を低減しつつ、側方障害物に対する支援制御を適切に行うことができる車両運転支援装置及び車両運転支援方法を提供する。
【解決手段】自車両側方の障害物を検出すると、所定時間後の自車両の将来位置を予測する。その予測した自車両の将来位置が所定の車線幅方向横位置に達したとき、制御開始と判定して前記障害物への接近を防止する方向に自車両を制御する。その際、障害物を非検出の状態から検出した状態となったときに、自車両が所定横位置よりも前記障害物側を走行しているとき、自車両が前記所定横位置よりも当該障害物とは反対側を走行しているときと比較して、前記制御開始の判定を抑制する。
(もっと読む)
車両運動制御装置
【課題】車両挙動を制御する複数のデバイスが共有するセンサの故障時における車両挙動の安定化を実現する。
【解決手段】CANを介して車両制御を行うデバイス1・デバイス2・デバイス3と、ヨーレートセンサ4とが接続され、各デバイスはそれぞれの運動制御にヨーレート検出値を用いる。ヨーレートセンサの故障を例えばデバイス3が検知した場合には、他のデバイス2・3がその故障を検知していない場合でも、ゲインを低減する。1つのデバイスの制御停止により残りのデバイスがそれを補うために制御量を大きくして車両挙動に悪影響を及ぼしてしまう場合でも、ゲインの低下により、その影響を小さくすることができ、車両運動の安定化を保持できる。また、残りのデバイスにおいてもセンサ故障が確定して制御停止に移行する場合にも、小さなゲインにより制御量を下げておいた状態から機能停止することができるため、車両挙動の急変を抑制することができる。
(もっと読む)
車両用制動制御装置
【課題】 回生協調制御により回生制動トルクと摩擦制動トルクとをすり替えるときの減速度の変動を抑制できる車両用制動制御装置を提供する。
【解決手段】 統合コントローラ110は、回生協調制御時、回生制動トルク変化量ΔRegが大きいほど、インプットロッドストロークXiの変化量に対するプライマリピストン2bの変化量を減少させるアシスト推力補正手段を備える。
(もっと読む)
車両用減速制御装置及びその方法
【課題】路面μの推定を必要とせず、路面状態に適合して減速制御する。
【解決手段】車両用減速制御装置は、検出した車輪力(横力Fy)及びスリップ度(スリップ角βt)を基に、車輪のグリップ特性を示すグリップ特性パラメータを得るμ勾配算出部25と、グリップ特性パラメータを基に、補正係数Kを得る補正係数K算出部26と、車両の旋回状態を基に目標車速V*を算出するとともに、該目標車速V*を補正係数Kにより補正する目標車速算出部22と、を備える。
(もっと読む)
障害物回避支援装置
【課題】障害物回避性能の更なる向上を図ることができる障害物回避支援装置を提供する。
【解決手段】障害物回避支援装置は、車輪の制動力を制御することによりアンダーステアを抑制するアンダーステア抑制制御部23と、車輪の制動力を制御することによりオーバーステアを抑制するオーバーステア抑制制御部22とを有する制動力制御装置1と、車両前方の障害物を検知し該障害物との接触を回避する操舵操作を支援する回避操作支援制御部42を有する電動パワーステアリング装置2と、を備える。回避操作支援制御部42が、車両前方の障害物を検知し該障害物との接触を回避する操舵操作を支援するように作動しているときには、アンダーステア抑制制御部23のゲインを通常時よりも高くし、オーバーステア抑制制御部22のゲインを通常時よりも低くする。
(もっと読む)
電動ブレーキ
【課題】ブレーキディスクに対するピストン押付力を的確に制御できる電動ブレーキを提供する。
【解決手段】電動モータの回転作動によって非回転ブレーキディスクに対して押付けられるピストンを備え、制御指令値uに基づいて電動モータを駆動するコントローラ20は、制御指令値uと制御出力yに応じて算出される外乱dの推定量eと制御ゲインgに応じて外乱フィードバック量Lを設定する外乱応答補償部41を備え、制御ゲインgは制御指令値uに対する目標指令値rの比率u/rに応じて設定される構成とした。
(もっと読む)
車線逸脱防止装置及びその方法
【課題】自車両側方の障害物の存在に、車線逸脱防止制御の作動を合致させる。
【解決手段】車線逸脱防止装置は、障害物を検出するレーダ装置14L,14Rが走行車線に対して逸脱傾向が発生している方向で自車両の側方に位置する障害物を検出した場合(ステップS24)、切増し操作量判定用しきい値δovr_endを大きくすることで、運転者の操舵操作に対する車線逸脱防止制御の作動の抑制をしない方向に補正をする(ステップS25)。
(もっと読む)
ブレーキ制御装置
【課題】液圧回路とホイールシリンダとをつなぐ接続系に弾性部材要素が含まれていても、液圧制御における良好な応答性を確保可能なブレーキ制御技術を提供する。
【解決手段】ある態様のブレーキ制御装置においては、ホイールシリンダ圧のフィードバック制御に際して接続通路内の液圧剛性の変化が考慮される。ブレーキECUは、設定対象となる制御ゲインがそれぞれ異なるように構成された複数の制御マップを保持し、リニア制御弁を通過する作動液の流量に応じて対応する制御マップを参照し、フィードバック制御の制御ゲインを設定する。
(もっと読む)
車両用制動制御装置及び方法
【課題】アシスト制動力の自然な調整を可能とした車両用制動制御装置を提供する。
【解決手段】制動力を付与するホィールシリンダとブレーキ操作力に応じた液圧を生成するマスタシリンダを接続する液圧ラインに接続されて各ホィールシリンダへ付与される液圧を調整する液圧調整部と、液圧調整部の作動を制御する制御部とを備える車両用制動制御装置において、ブレーキ操作速度と車速に応じて、または、ブレーキ操作速度と自車両と先行車または車両前方の障害物との距離に応じて、液圧を調整する。つまり、車速vや先行車、障害物との距離といった車両状態量と運転者のブレーキ操作量(例えば踏力f)の変化速度に応じて、踏力fに対して減速度Gを設定する際に用いるゲインCを可変とすることで、減速度特性を調整する。
(もっと読む)
1 - 20 / 28
[ Back to top ]