
Fターム[3D246MA11]の内容
ブレーキシステム(制動力調整) (55,256) | 安全装置 (1,468) | 故障検知 (454) | 警報 (124)
Fターム[3D246MA11]の下位に属するFターム
Fターム[3D246MA11]に分類される特許
21 - 40 / 52
衝突防止支援装置
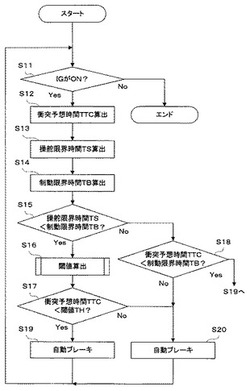
【課題】最適なタイミングで自動ブレーキを開始する衝突防止支援装置を提供することを目的とする。
【解決手段】車両の周囲に存在する障害物と車両との衝突を予測する衝突予測手段と、運転者が把持するステアリングホイールのリム部の把持状態を検出する把持状態検出手段と、障害物と車両とが衝突すると予測された場合、運転者の操作に依らない自動的な制動動作を開始する自動ブレーキタイミングを把持状態検出手段により検出された把持状態に応じて決定する自動ブレーキタイミング決定手段と、自動ブレーキタイミング決定手段により決定された自動ブレーキタイミングで制動動作を実行する制動手段とを備える衝突防止支援装置。
(もっと読む)
車両用走行安全装置

【課題】複数のレーダ装置を設けた場合に生じる不検知領域に物体が存在すると予測される場合に、接触回避効果を高める。
【解決手段】送受信手段が複数備えられており、回避支援手段は、自車前方の領域であって一の送受信部の検知領域および他の送受信部の検知領域間の不検知領域に外挿部により外挿された制御対象物体が存在する場合には(ステップS14:Yes)、不検知領域以外に外挿部により外挿された制御対象物体が存在する場合の作動内容(ステップS8)よりも、接触回避効果の高い作動内容(ステップS11)を設定する。
(もっと読む)
車両用電動ブレーキ装置
【課題】自車両の位置や速度に応じて適切に制動力を発生させることにより、車両の安全性を効果的に向上させることが可能な車両電動ブレーキ装置を提供する。
【解決手段】モータ15を駆動源とする電動ブレーキ10の作動により車輪3〜6の回転を制動する車両用電動ブレーキ装置1において、車両が停止すべき位置(停車位置)を検知する停車位置検知手段(23,25等)と、自車速度Vを検知する車速検知手段(21)と、上記停車位置検知手段により自車両Aの周りに停車位置が検知され、かつ上記車速検知手段により自車両Aが停止状態にあることが検知された場合に、上記モータ15を駆動して電動ブレーキ10を作動させる制御ユニット17とを設ける。
(もっと読む)
車両の走行安全装置
【課題】自車両の交差点進入時において、移動体の将来行動を高精度に予測し、正確な衝突判断を行う。
【解決手段】交差車両の推定進路上前方に先行車両が検出されている場合に、先行車両と交差車両との相対関係に基づいて交差車両が進路変更するか否かを予測する進路変更予測手段26と、交差車両の走行する車線前方における進路変更可能なスペースの有無を判定するスペース判定手段22と、交差車両が進路変更すると予測され、かつ進路変更可能なスペースが有ると判定された場合に、交差車両の推定進路を補正する推定進路補正手段24とを備える。
(もっと読む)
ブレーキ制御装置
【課題】リザーバタンク内のブレーキフルードの量が十分でない場合に、マスタシリンダにおけるブレーキフルードの減少を抑制する。
【解決手段】液面レベル検出手段は、ブレーキフルードの液面レベルを検出する。ホイールシリンダから排出されたブレーキフルードがマニュアル液圧源に戻れなくなる液面レベルまで低下しており、かつ、通常行われている第1制御モードとは異なる第2制御モードに変更される液面レベルまでは低下していないと検出された場合、制動が開始される前に第1制御弁を閉弁するとともに制動が開始された後は第1制御モードで各制御弁を制御する。制御手段は、第1制御モードから第2制御モードへ変更する液面レベルまで低下していると検出された場合、第2制御モードで各制御弁を制御する。
(もっと読む)
車両用警報装置
【課題】 警報制動前の車両の加速度によって警報開始前後の加速度の変化量に差異があるために引き起こされる、警報によって運転者が違和感を覚えてしまう問題や、警報効果が小さくなってしまう問題を回避する車両用警報装置を提供すること。
【解決手段】 この車両用警報装置は衝突予測時間tが警報制動時間T1に達したときの自車両の加速度aに基づいて、警報制動中の目標加速度bを決定する。その上で、装置はエンジンのスロットルバルブを全閉にすることにより駆動力を0にする。更に、装置は目標加速度bが達成されないと考えられる場合には目標加速度bを達成するような制動力を付与する。衝突予測時間tが警報制動時間T1に達したときの加速度aに基づいて目標加速度bが適切な値に設定され得るから、警報開始前後の加速度の変化量を適切な量にすることができる。
(もっと読む)
車両用衝突被害軽減装置
【課題】自車進行路外に存在し、自車に接近してくる横移動物に対しても衝突被害軽減を行う車両用衝突被害軽減装置を得る。
【解決手段】物体検出手段122によって検出した物体が、自車の進行路の内外のどちらにいるかを進行路内外判定手段124によって判定し、進行路外物体と判定された場合に、横移動物体判定手段127によってこの進行路外物体が自車の進行路に横から接近する横移動物体であることを判定し、さらに、この判定された横移動物体の相対位置及び相対速度から、所定時間後に自車と衝突するかまたは自動制動手段130が作動するゾーンに入る可能性を衝突物体判定手段128が判定した場合のみ、自動制動手段130の自動制動のためのブレーキ圧を予備充填手段131により予備充填する。
(もっと読む)
運転走行支援装置
【課題】運転者に運転能力が低下していることを気付かせ、運転能力が低い状態での運転を減少させる運転走行支援装置を提供する。
【解決手段】運転走行支援装置10は、運転者の覚醒状態又は飲酒状態を検出する運転者状態検出部11と、前記運転者状態検出部11により検出された覚醒状態又は飲酒状態に基づいて、前記運転者の状態を判定する運転状態判定部12と、前記運転状態判定部12により判定された前記運転者の状態に基づいて、アクセル、ブレーキ、ステアリング、車間距離制御手段及び車線維持手段の少なくとも1つの制御特性を変更するように制御する車両制御部13と、を備えている。
(もっと読む)
車両用制御装置
【課題】車両用制御装置において、先行車が存在するのに、一瞬、自車両が車線を逸脱しそうになるような状況で、先行車が存在しないという誤った判断をすることがなく、先行車への追従性が損なわれることはなくなり、これにより、追従性精度の向上に貢献することにある。
【解決手段】車線逸脱防止制御手段から、自車両の推定走行軌跡と走行レーンとの角度情報を出力し、角度情報が設定値以上ある場合で、且つレーダから出力される結果が、前回の結果が先行する車両有りで、今回の結果が先行する車両無しの場合でも、先行車両検出手段で先行車有りと出力している。
(もっと読む)
走行制御装置
【課題】フィードバック制御によって車両の走行制御を行う場合により高精度な走行制御を行うことができる走行制御装置を提供することを課題とする。
【解決手段】走行計画に従って走行するようにフィードバック制御によって車両を走行制御する走行制御装置1であって、走行計画における目標軌跡の位置毎に重視する制御項目を決定する制御項目決定手段41と、この決定された重視する制御項目の制御ゲインを他の制御項目より高くする制御ゲイン決定手段41と、この決定された制御ゲインを走行計画に組み込む走行計画補正手段41とを備えることを特徴とする。
(もっと読む)
ブレーキ制御装置
【課題】液漏れの誤判定により油圧制御モードが変更される事態を抑制する。
【解決手段】液面レベル検出装置100は、リザーバタンク26内のフルードの液面レベルを検出する。ECUは、液面レベル検出装置100により、液面レベルが最低液面レベルMINとなったことが検出された場合に、警報を発出する。警報が発出された後、液面レベル検出装置100により、液面レベルが最低液面レベルMINよりも低いフェイルセーフモード作動液面レベルFLとなったことが検出された場合に、ECUは、通常制御モードからフェイルセーフモードに切り替えて制動制御を行う。
(もっと読む)
車両用走行制御装置および車両用走行制御方法
【課題】一般道路は勿論、高速道路においても最適な速度でカーブを走行できる新規な車両用走行制御装置および車両用走行制御方法の提供。
【解決手段】カーナビゲーションシステム20によって誘導走行している自車両の走行路前方の道路情報を検出し、その走行路が一般道路であるときは、先行車に対する追従走行を優先し、高速道路であるときは、前記カーナビゲーションシステム20のナビゲーション情報から得られる目標車速と追従走行時の車速を比較し、低いほうの車速を選択して(セレクトロー)走行するように制御する。これによって、一般道路は勿論、高速道路においても的確な速度でカーブを走行できる。
(もっと読む)
車両操作支援装置
【課題】障害物の移動状態に応じた車両の操作支援を実行可能な車両操作支援装置を提供すること。
【解決手段】障害物の回避を支援する車両操作支援装置Uにおいて、自車に対する障害物を検知し、その検知結果を用いて当該障害物と自車との相対距離および相対速度を少なくとも含む移動状態を検出する障害物検知手段M1と、障害物検知手段M1が検知した障害物が、回避支援の対象となるか否かを、障害物検知手段M1が検出した相対距離、相対速度および車速センサSbで検出した自車の速度を用いて判定する回避支援対象判定手段M2と、回避支援対象判定手段M2による判定に応じて前記自車の制動制御を行なう制動装置制御手段(M3,M4)とを備える車両操作支援装置Uとする。
(もっと読む)
車両用ブレーキ装置および車両用ブレーキ装置の作動方法
本発明は、第1および第2のブレーキ制御装置(30a、30b)と、それぞれ車両の1つの車輪に付属されている4つの車輪アクチュエータ装置(34a、34b、36a、36b)と、および第1および第2の信号ライン(32a、32b)であって、この場合、前記第1の信号ライン(32a、32b)は前記第1のブレーキ制御装置(30a、30b)を前記4つの車輪アクチュエータ装置(34a、34b、36a、36b)の2つと結合し、且つ前記第2の信号ライン(32a、32b)は前記第2のブレーキ制御装置(30a、30b)を他の2つの車輪アクチュエータ装置(34a、34b、36a、36b)と結合する、前記第1および第2の信号ライン(32a、32b)と、を備えた車両用ブレーキ装置(10)において、前記4つの車輪アクチュエータ装置(34a、34b、36a、36b)の各々は、能動状態において、さらに、ブレーキ制御装置(30a、30b)および車輪アクチュエータ装置(34a、34b、36a、36b)の少なくともいずれかの所定数が非能動状態であるかどうかを検出し、およびブレーキ制御装置(30a、30b)および車輪アクチュエータ装置(34a、34b、36a、36b)の少なくともいずれかの所定数が非能動状態であることを検出したとき、前記ブレーキ制御装置(30a、30b)に付属されている車両車輪に所定のブレーキ・トルク(52)を与えるように設計されている、車両用ブレーキ装置(10)に関するものである。さらに、本発明は、車両用ブレーキ装置(10)の作動方法に関するものである。 (もっと読む)
車両制御装置
【課題】制動制御後において車両が経路方向とは異なる方向へ発進するおそれを低減することが可能な車両制御装置を提供する。
【解決手段】車両制御装置1は、車両を停止させる制動制御を行った後、所定のタイミングで制動制御を解除する制動制御部11を備えている。さらにこの車両制御装置1は、制動制御後に、車両が走行する経路方向を取得する経路方向取得部12と、その制動制御を解除した後の車両の進行方向を推定する進行方向推定部13と、を備え、制動制御部11は、経路方向と進行方向との偏差が所定値よりも大きい場合にその制動制御を保持する。
(もっと読む)
車両制御装置
【課題】ドライバに対して車両が走行不能状態であると誤認させるのを抑制することができる車両制御装置を提供する。
【解決手段】
車両のアイドルストップ制御を行うアイドルストップ制御部7と、車両の緊急停止制御を行う緊急停止制御部6とを備える車両の車両制御装置1であって、ECU2のアイドルストップ禁止部8は、緊急停止制御部6から送信される緊急停止開始信号を受信すると、アイドルストップ制御部7にアイドルストップ禁止信号を送信してアイドルストップ制御を禁止させ、緊急停止制御部6から送信される緊急停止終了信号を受信すると、所定条件の下、アイドルストップ制御部7にアイドルストップ許可信号を送信してアイドルストップ制御を再開させる。
(もっと読む)
発進支援装置
【課題】運転者が従来以上に周囲の状況を容易に認識できる状況とし、安全に駐車区域から車両を発進させることが可能な発進支援装置を提供する。
【解決手段】駐車準備位置から駐車区画に至る駐車軌跡を取得する駐車軌跡取得手段と、駐車軌跡に沿って車両を移動中に、車両周辺の情報を駐車時車両周辺情報として取得する駐車時周辺情報取得手段と、駐車軌跡情報に基づいて、車両を駐車軌跡の逆軌跡を辿って自動走行させることにより、駐車区画からの発進制御を行う自動発進制御手段と、逆軌跡に沿った車両の自動発進中または自動発進の準備中に、車両周辺の情報を発進時車両周辺情報として取得する発進時周辺情報取得手段と、駐車時車両周辺情報と発進時車両周辺情報との比較に基づいて、逆軌跡に沿った自動発進制御が実行ないし継続不能と判定された場合、自動発進制御を抑制するための出力を行う自動発進制御抑制出力手段と、を備えることを特徴とする発進支援装置として提供可能である。
(もっと読む)
衝突予測装置
【課題】衝突予測精度の向上を図った衝突予測装置を提供すること。
【解決手段】他車両104の複数位置の物標点P1〜P5を各々検出し、各物標点P1〜P5について予測した衝突部位に基づいて自車両102と他車両104との衝突態様を予測する。これにより、複数位置の物標点P1〜P5を各々検出して、各物標点P1〜P5について衝突部位を予測しているので、他車両104の限られた点(従来の代表点)だけでなく、他車両104の複数位置について自車両102のどの部位に衝突するのかを予測することができる。従って、従来のグルーピング処理において、代表点P1,P3に包括されて物標出力されていなかったメンバーP2,P4,P5情報を有効活用することで、衝突予測精度を向上させることができる。
(もっと読む)
車線維持支援装置
【課題】運転者の覚醒度が低下した際に、操舵補助トルク付与による自車両の旋回半径を小さくし、車線からの逸脱をより効果的に防ぐことができる車線維持支援装置を提供する。
【解決手段】車線維持支援装置100は、自車両が走行する車線を認識し、自車両が車線を逸脱するか否かを判定し、逸脱すると判定した場合に、自車両の位置を車線内に維持するための操舵補助トルクを付与する装置であって、車輪に制動力を付与する制動力付与手段12と、運転者の覚醒度を検出するドライバ状態検出部3とを備え、ドライバ状態検出部3により得られる覚醒度が低下している場合であって自車両が車線を逸脱すると判定した場合に、自車両の位置を車線内に維持するための制動力を制動力付与手段12により付与する。
(もっと読む)
運転タイプ判別装置、プログラム、及び運転支援装置
【課題】運転者毎の運転タイプを的確に判別することが可能な運転タイプ判別装置等を提供すること。
【解決手段】車速を検出する車速検出手段(10)と、方向指示器の操作状態を検出する方向指示器操作状態検出手段(20)と、運転者の安全確認動作を検出する安全確認動作検出手段(30、35)と、車速検出手段、方向指示器操作状態検出手段、及び安全確認動作検出手段の検出結果に基づいて、運転者が複数の運転タイプのうちいずれに該当するかを判別する判別手段(50)と、を備える運転タイプ判別装置(1)。
(もっと読む)
21 - 40 / 52
[ Back to top ]