
Fターム[3D246MA13]の内容
ブレーキシステム(制動力調整) (55,256) | 安全装置 (1,468) | 故障検知 (454) | 警報 (124) | 聴覚 (35)
Fターム[3D246MA13]に分類される特許
1 - 20 / 35
電動ブレーキ制御システム
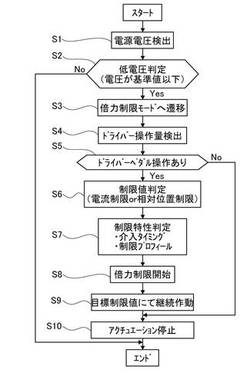
【課題】車両電源の失陥によりブレーキ操作中に電動アクチュエータへの電源電圧が低下した際、急激なブレーキ液圧低下の抑制と急激なペダル踏力増加の緩和を達成すること。
【解決手段】ドライバーによるペダル操作量を検出し、倍力モータ24をアシスト制御することで、倍力されたブレーキ液圧をマスタシリンダ68により発生させる電動倍力ブレーキ装置6を有する。この電動ブレーキ制御システムにおいて、電源電圧検出回路10と、コントローラ21と、を備える。電源電圧検出回路10は、車両電源1の電源電圧を検出する。コントローラ21は、車両電源1の失陥によりブレーキ操作中に倍力モータ24への電源電圧Vが低下した際、検出される電源電圧Vが、低電圧判定基準値V1になってから倍力機能が停止する最低作動電圧値V0になるまでの間に、ブレーキ液圧を徐々に低下させるように倍力モータ24を制御する(図4)。
(もっと読む)
車両の退避走行制御装置

【課題】車両走行中の緊急時に車両を安全な場所まで退避走行させる際の安全性・ドライバビリティを向上させる。
【解決手段】運転者が操作可能な位置に退避走行スイッチ11を設ける。車両走行中に何等かの緊急事態が発生して運転者が車両を停車させた方が安全だと感じたときに、運転者が退避走行スイッチ11をオン操作すると、退避走行用リレー20と電子スロットル用リレー21がオフされて、車両走行モードが退避走行モードに切り替えられる。これにより、電子スロットル装置18の電源をオフして、スロットル開度を退避走行用スロットル開度まで閉じることで、エンジン17の出力を低下させて、車両駆動力を抑制し、車両を退避走行させる。退避走行中も、エンジン17の運転を継続することで、パワーステアリング装置及びブレーキ装置を運転者がハンドル操作可能で且つ退避走行中のブレーキ力を確保する。
(もっと読む)
車両走行制御装置および車両走行制御方法
【課題】ドライバの回避操作に対応する制御介入により車両の安定性が損なわれるといった事態を抑制する。
【解決手段】車両CのリスクポテンシャルRPが第1のリスクポテンシャルRf1を超えることにより、ラップ率ヨーモーメントγrに基づいて車両Cに目標ヨーモーメントγfが付与される。また、車両CのリスクポテンシャルRPが第2のリスクポテンシャルRf2を超えることにより、舵角ヨーモーメントγsに基づいて車両Cに目標ヨーモーメントγfが付与される。
(もっと読む)
車両の制動制御装置
【課題】 制動装置に故障が生じたときに、ドライバが制動装置の故障を認識していない場合であっても、車両が動き出すことを防止することができる制動制御装置を提供する。
【解決手段】 ブレーキECU1は、ブレー故障センサ6からブレーキ故障信号を受信した際に、警報装置8に警報信号を送信するとともに、パワートレインECU2にブレーキ異常信号を送信する。パワートレインECU2は、ブレーキ異常信号を受信した場合に、パワートレイン5におけるクラッチ12を開放する。また、車両が走行する道路の路面勾配が上り勾配である場合には、クラッチ12を係合する。
(もっと読む)
走行支援装置
【課題】自車両が走行車線を離れる際に警報を行うことで安全走行を支援する走行支援装置において、車線変更時の安全性を向上させること。
【解決手段】後続車両が存在するか否かを判定する(S110)。後続車両が存在すると判定された場合には(S110:YES)、運転者に車線変更の意図があるか否かを判定する(S120)。具体的には、ドライバ操作判定部が、ステアリングセンサから入力された自車両のステアリングホイールの操作状態からステアリングホイール操作の有無を判定する。運転者に車線変更の意図があると判定された場合には(S120:YES)、自動ウインカをONに設定するとともに警報ACTによる報知警報をONに設定する(S130)。なお、自動ウインカがONに設定されると作動機能調停部が自動ウインカを作動させ、警報ACTによる報知警報がONに設定されると作動機能調停部が警報ACTを作動させる。
(もっと読む)
電子コントロールされる駐車・ブレーキ・システム
本発明は、乗り物のための駐車・ブレーキ・システムに関し、前記駐車・ブレーキ・システムは、駐車・ブレーキECU(20)を通じて電子コントロールされ、前記乗り物のユーザが前記駐車・ブレーキの付勢の程度をコントロールすることが可能な駐車・ブレーキ入力デバイス(10)から受信された信号に従って比例ブレーキング効果を達成し、前記駐車・ブレーキ入力デバイス(10)が、前記ユーザが、第1の位置と第2の位置の間においてベース(12)に関して変位させて、前記駐車・ブレーキの付勢の程度をコントロールすることが可能な操作部材(14)と、前記第1の位置と前記第2の位置の間における前記ベース(12)に関する前記操作部材(14)の瞬時位置を決定する少なくとも1つのセンサ(16)と、前記ユーザによって要求される前記駐車・ブレーキの付勢の程度を示すデジタル信号を生成するため、およびこのデジタル信号を少なくとも前記駐車・ブレーキECU(20)に伝達(19,22)するためのコントローラ回路(18)とを包含する。 (もっと読む)
車両制動装置
【課題】路面状況により適切に対応させて部分的なハイドロプレーニング現象を検出することができる車両制動装置を提供すること。
【解決手段】本発明による車両制動装置1は、スリップ率が目標スリップ率よりも大きい場合に各車輪に対応するホイールシリンダ内の油圧を減圧するロック状態抑制手段7bと、各車輪に対応する各ホイールシリンダ内の油圧を検出して、左右何れかの後輪に対応するホイールシリンダ内の油圧が第一所定値β以上の高油圧域であり、当該高油圧域である当該ホイールシリンダに対応する後輪に対して左右方向の位置関係が一致しかつ前側に位置する前輪に対応するホイールシリンダ内の油圧が第二所定値γ未満の低油圧域であって、ロック状態抑制手段7bが油圧を減圧している場合に、当該前輪にハイドロプレーニング現象が発生していると判定する判定手段7cを備えることを特徴とする。
(もっと読む)
車両用衝突回避装置
【課題】運転者の認識しやすい範囲に存在する物体よりも自車の前方および前左右側方を横移動する物体、例えば、交差点において、一時停止後に交差点内に進入してくる交差車両を優先して警報または制御対象として抽出することができる車両用衝突回避装置を提供する。
【解決手段】警報対象または自動制動対象を判定するための衝突予測時間に基づいた閾値を、横移動物体と判別されなかった物体に対する閾値と、横移動物体と判別されなかった物体に比べて早めに警報または自動制動が発生するように設定された横移動物体と判別された物体に対する閾値の2種類もつようにしたものである。
(もっと読む)
自動車用乗員保護装置
【課題】プリクラッシュセーフティシステムを搭載した車両に用いて好適の自動車用乗員保護装置に関し、衝突が予測される状況において乗員が受けるダメージを低減する。
【解決手段】車両に搭載され車両の衝突を推定する衝突推定手段15と、衝突推定手段15により車両の衝突が推定されると、車両衝突前に乗員に対して筋肉を刺激して筋肉を収縮させる筋肉刺激手段14とを有する
(もっと読む)
車両制御装置
【課題】
従来技術によれば、自車左に障害物がある場合、当該障害物を回避するよう制御閾値が設定され、自車は当該制御閾値を超えると逸脱量に従って制御閾値を超えない位置まで戻るよう制御されるが、自車右にリスクを持った対向車が接近している場合でも、対向車の方へ自車を制御するため、運転者にとって恐怖感や違和感を与える、という課題がある。
【解決手段】
車両制御装置は、自車の左に存在する第1の危険度、及び、自車の右に存在する第2の危険度を算出する算出部と、第1の危険度に基づいて第1の制御閾値を自車の左に設定し、第2の危険度に基づいて第2の制御閾値を自車の右に設定する設定部と、第1及び第2の危険度に基づいて、第1又は第2の制御閾値のうち、少なくとも何れか一方を変更する変更部を備える。
(もっと読む)
車両用衝突回避支援装置
【課題】 見通しの悪い交差点等に進入した自車に他車が衝突しないように、他車に対して効果的な警報を発する。
【解決手段】 物体検知手段M2の検知結果に基づいて障害物抽出手段M3が自車に接近する他車を障害物として抽出し、優先道路判定手段M4が自車が走行する道路と他車が走行する道路のどちらが優先道路か判定すると、危険度判定手段M5が障害物および優先道路に基づいて他車が自車に衝突する危険度を判定する。そして優先道路判定手段M4が自車が走行する道路を優先道路と判定し、かつ危険度判定手段M5が所定値以上の危険度であると判定すると、警報手段M9が他車に対して警報を発するので、他車に衝突の危険性を知らしめて自発的な回避操作を促し、衝突を未然に回避することができる。警報手段M9が作動しても危険度が所定値以上の場合に、自動減速手段M8を作動させて自車を自動的に減速するので、他車との衝突を一層確実に回避することができる。
(もっと読む)
液面レベル検出装置およびブレーキ制御装置
【課題】安価な構成でリニアに液面レベルを検出する。
【解決手段】液面レベル検出装置100は、リザーバタンク内の局所液面レベルLpが所定の基準液面レベルLs以上であるか否かを判定し、局所液面レベルLpが基準液面レベルLs以上である場合のオフ信号と、局所液面レベルLpが基準液面レベルLs未満である場合のオン信号とからなるオンオフ信号を出力する液面レベルスイッチ102と、液面レベルスイッチ102からオンオフ信号を受け取り、オン信号のデューティ比Dを演算するデューティ比演算部108と、デューティ比Dと、実液面レベルLrとの相対関係を予め記憶する記憶部112と、記憶部112に記憶された相対関係を参照して、デューティ比演算部108により演算されたデューティ比Dから実液面レベルLrを推定する液面レベル推定部110とを備える。
(もっと読む)
車両の運転支援装置
【課題】先行車と自車両と後続車の走行状態を適切に認識し、先行車と自車両との運転状態、及び、自車両と後続車との運転状態を考慮して先行車と後続車に対する自車両位置が実走行に合致した最適な位置となるように支援しドライブフィーリングを向上させる。
【解決手段】制御ユニット7は、自車両1の先行車との追突リスクRfを、自車両1の車間時間THWfと自車両1の衝突余裕時間TTCfとに応じて設定する一方、自車両1の後続車による被追突リスクRrを、後続車の車間時間THWrと、先行車との追突リスクRfにおける衝突余裕時間TTCfの重みよりも大きく重み付けした自車両1の被衝突余裕時間TTCrとに応じて設定し、これら先行車との追突リスクRfと後続車による被追突リスクRrに応じてブレーキ制御、及び、警報制御を行う。
(もっと読む)
車両の障害物検知装置
【課題】車両が障害物と衝突しそうか否かを迅速に判定し且つ障害物検知装置による作動機器の誤作動を抑えつつ、車両が走行車線から逸脱した際の安全性を向上させる。
【解決手段】障害物を検知するレーダ装置1と、レーダ装置1から情報を受けて作動機器7,9,11を制御するコントロールユニット5とを備えた障害物検知装置である。障害物が走行車線内に位置しているか否かを判定する障害物位置判定部5cと、走行車線からの車両の逸脱を予知する逸脱予知部5fと、車両と障害物との衝突を予知する衝突予知判定を行う衝突予知判定部5dとをさらに備えている。衝突予知判定部5dは、障害物位置判定部5cにより障害物が走行車線内に位置していると判定されたときには衝突予知判定を行う一方、障害物が走行車線内に位置していないと判定された場合には、逸脱予知手段5fにより走行車線からの車両の逸脱が予知されたときにのみ衝突予知判定を行う。
(もっと読む)
衝突予測装置
【課題】 自車両と障害物との衝突を予測する際に、自車両における障害物の衝突位置を精度よく検出することができる衝突予測装置を提供する。
【解決手段】衝突予測ECU1における衝突位置分布演算部20は、衝突位置演算部19が予測した衝突予測位置に基づいて、自車両の領域を分割して得られる分割領域における衝突予測領域としての信頼度を算出する。衝突位置分布演算部20は、しきい値マップ記憶部21に衝突予測領域としての信頼度を参照して衝突予測領域を予測する。ここで、自車両の領域を分割して得られる分割領域AX,BXのうち、第1列分割領域AXは、2つの第2列分割領域BXと重なって設定されている。また、第2列分割領域BXは、2つの第1列分割領域AXと重なって設定されている。
(もっと読む)
車両挙動制御装置
【課題】車両のアンダーステア状態又はオーバーステア状態の制御性能を良好に維持すること。
【解決手段】車両挙動制御装置10は、車速Vを検出する車速検出手段11と、実ヨーレートψを検出する実ヨーレート検出手段13と、車両が走行する道路のカーブの曲率半径Rを算出するカーブ曲率半径算出手段14と、車速Vとカーブの曲率半径Rとに基づいて目標ヨーレートψTを算出する目標ヨーレート算出手段15と、実ヨーレートψと目標ヨーレートψTとの偏差であるヨーレート偏差Δψを算出するヨーレート偏差算出手段16と、実ヨーレート検出手段13により検出された実ヨーレートψと、ヨーレート偏差算出手段16により算出されたヨーレート偏差Δψと、に基づいて、車両の制動力を制御することで、車両のアンダーステア状態又はオーバーステア状態を制御する制動力制御手段17と、を備えている。
(もっと読む)
車両用電動ブレーキ装置
【課題】自車両の位置や速度に応じて適切に制動力を発生させることにより、車両の安全性を効果的に向上させることが可能な車両電動ブレーキ装置を提供する。
【解決手段】モータ15を駆動源とする電動ブレーキ10の作動により車輪3〜6の回転を制動する車両用電動ブレーキ装置1において、車両が停止すべき位置(停車位置)を検知する停車位置検知手段(23,25等)と、自車速度Vを検知する車速検知手段(21)と、上記停車位置検知手段により自車両Aの周りに停車位置が検知され、かつ上記車速検知手段により自車両Aが停止状態にあることが検知された場合に、上記モータ15を駆動して電動ブレーキ10を作動させる制御ユニット17とを設ける。
(もっと読む)
車両用障害物検出装置
【課題】交差路において歩行者などの障害物との衝突を有効に回避することが出来るように障害物を検出する車両用障害物検出装置を提供する。
【解決手段】本発明は、交差路に設置された反射鏡に写る障害物の像を利用して障害物を検出する車両用障害物検出装置であって、交差路に設置される反射鏡を検出する反射鏡検出手段と、反射鏡に写る障害物の像を検出する障害物像検出手段と、検出された障害物の像からその障害物の反射鏡への接近度を算出する障害物接近度算出手段と、接近度に応じて警報システム及び/又は安全システムを制御するシステム制御手段と、を有する。
(もっと読む)
自動車のペダル位置に関連する設定値を決定するシステム
本発明は、2個のセンサ(24、26)を具備する種類の自動車(10)においてペダル(22)の位置に関連する設定値を決定するためのシステムに関し、前記2個のセンサの各々が前記位置に関連する値を測定する。本システムは、ペダル(22)の所定の切換え位置の第1状態と第2状態との間で切り換えを行う手段(28)と、2個のセンサによる測定値と切換え手段の現在の状態とに基づいて設定値を生成する手段(60;70)とを具備する。本発明に従い、生成手段(60;70)は、切換え手段(28)第1状態にあるときの最小ペダル位置に対応する測定値と、切換え手段(28)第2状態にあるときの最大ペダル位置に対応する測定値とを選択することが可能である。  (もっと読む)
(もっと読む)
ブレーキ制御装置
【課題】液漏れの誤判定により油圧制御モードが変更される事態を抑制する。
【解決手段】液面レベル検出装置100は、リザーバタンク26内のフルードの液面レベルを検出する。ECUは、液面レベル検出装置100により、液面レベルが最低液面レベルMINとなったことが検出された場合に、警報を発出する。警報が発出された後、液面レベル検出装置100により、液面レベルが最低液面レベルMINよりも低いフェイルセーフモード作動液面レベルFLとなったことが検出された場合に、ECUは、通常制御モードからフェイルセーフモードに切り替えて制動制御を行う。
(もっと読む)
1 - 20 / 35
[ Back to top ]