
Fターム[3D301DA30]の内容
車体懸架装置 (72,824) | 構成要素 (13,859) | アクチュエータ(車重を支えるもの) (507) | 回転式 (82)
Fターム[3D301DA30]に分類される特許
1 - 20 / 82
サスペンション装置
【課題】 サスペンション装置の大型化を抑制しつつ電磁アクチュエータのフェイルセーフ機能を設ける。
【解決手段】 電磁アクチュエータ30は、電動モータ31とボールネジ機構32とを備える。電動モータ31は、円筒状のロータ310を備え、このロータ310はボールネジナット322に連結される。ボールネジナット322と螺合するボールネジ軸321は、ロータ310の中空部に隙間をあけて挿通される。ロータ310とボールネジ軸321との隙間には粘性油40が封入される。バネ上部材とバネ下部材とが上下方向に相対運動すると、ロータ310とボールネジ軸321との間に封入された粘性油に粘性せん断力が発生し、この粘性せん断力が、バネ上部材とバネ下部材との相対運動を減衰させる。
(もっと読む)
車体傾斜装置

【課題】車体の姿勢の安定性を向上させる。
【解決手段】車両の停止状態において、人の降車動作の開始が検出された場合(S3)には、降車中リーン角制御が行われ、車体が安定な姿勢に制御される。降車中リーン角制御は、人の降車動作中、継続して行われる。そして、人の降車動作の終了が検出された場合(S5)に、降車中リーン角制御が終了させられる。このように、乗り物から人が降車する間、車体が安定な姿勢に制御されるため、車体の安定性を向上させることができる。
(もっと読む)
車両
【課題】車体の安定を維持することができ、旋回性能を向上させることができるとともに、乗員が違和感を感じることがなく、乗り心地がよく、安定した走行状態を実現することができるようにする。
【解決手段】互いに連結された操舵部及び駆動部を備える車体と、車体を操舵する操舵輪と、車体を駆動する駆動輪と、操舵部又は駆動部を旋回方向に傾斜させる傾斜用アクチュエータ装置と、車体に作用する横加速度を直接的又は間接的に検出する2つのセンサと、傾斜用アクチュエータ装置を制御して車体の傾斜を制御する制御装置とを有し、制御装置は、2つのセンサが検出する横加速度に基づいて、旋回方向外向きの加速度におけるセンサの検出軸方向の加速度成分と、重力におけるセンサの検出軸方向の加速度成分との合成値を選択的に算出し、車体の傾斜を制御する。
(もっと読む)
車両
【課題】車体の姿勢が変化するときであっても横方向の加速度成分がゼロとなり、車体及び乗員には車体の縦方向軸線と平行な方向の力が作用するので、車体の安定を維持することができ、また、旋回性能を向上させることができるとともに、乗員が違和感を感じることがなく、乗り心地がよく、安定した走行状態を実現することができるようにする。
【解決手段】互いに連結された操舵部及び駆動部を備える車体と、操舵部又は駆動部を旋回方向に傾斜させる傾斜用アクチュエータ装置と、車体に作用する横加速度を直接的又は間接的に検出する複数のセンサと、車体の要求旋回量を検出する要求旋回量検出手段と、車速を検出する車速検出手段とを有し、横加速度に基づくフィードバック制御を行うとともに、要求旋回量及び車速に基づくフィードフォワード制御を行って車体の傾斜を制御する。
(もっと読む)
モータ制御装置
【課題】 モータが高速回転している時に電界効果トランジスタに過大な電流が流れることに起因した電界効果トランジスタの破損を防止すること。
【解決手段】 モータ制御装置1は、直流電源に接続され、スイッチ素子として電界効果トランジスタが用いられたインバータ回路70と、インバータ回路70に電気的に接続された3相モータ11と、電界効果トランジスタのスイッチング作動を制御するサスペンションECU50とを備える。また、3相モータ11に流れる相電流の飽和電流Isatが電界効果トランジスタの最大電流Imaxよりも小さい電流となるように、3相モータ11の電機子コイルUcoil,Vcoil,Wcoil,のインダクタンスが設定される。
(もっと読む)
水陸両用車
【課題】 陸上走行に於いては車輪の上下ストロークが大きく、スクリューの格納も出来、水上では車輪を格納して安定した走行が出来、又水平を保ち、水際で岩に当ってもスクリューが破損しない水陸両用車を提供することにある。
【解決手段】 駆動機構を組み込んだトレーリングアーム式懸架装置と、車輪の出し入れや、車両がバウンドしたときに必要なバンプストップに代わる機能が発揮出来る両ロッド式差動シリンダー使用のエアサスペンションシステムとの組み合せ、及び、車体のタイヤハウスを利用した浮力補助システム、更に格納式スクリューにより目的が可能となる。
(もっと読む)
サスペンション装置
【課題】車両の車高、姿勢を制御するときの動作を抑え、消費動力を小さくして効率のよい制御を行う。
【解決手段】サスペンション装置1を、車体102に取付けられたハウジング2と、ハウジング2から回転可能に突出し、突出端側が径方向に延びてサスペンションアーム103に接続されたアーム部10と、アーム部10の回転運動を直線運動に変換するボールアンドランプ機構と、ボールアンドランプ機構による直線運動に付勢力を与える付勢機構と、付勢機構による付勢力を調整する付勢力調整機構とにより構成する。この場合、付勢力調整機構は、プランジャとねじ部材とによるねじ機構として形成する。これにより、電動モータでねじ部材を回転駆動しない限り、プランジャを軸方向に固定できるから、電動モータを効率よく制御することができる。
(もっと読む)
車両
【課題】車両を手押しで容易に走行させることができるようにする。
【解決手段】走行用の車輪を備えた本体部、搭乗部及び操舵部から成る搭乗・操舵部を有する。傾斜部位を路面に対して傾斜させるためのアクチュエータと、傾斜部位に生じる横加速度を検出する横加速度検出部と、乗員が、車両を手押しで走行させるために、傾斜部位を傾斜させたときの横加速度に基づいて傾斜制御を行い、アクチュエータを駆動する傾斜制御処理手段とを有する。乗員が傾斜部位を傾斜させたときの横加速度に基づいて傾斜制御が行われ、アクチュエータが駆動されるので、傾斜部位は、乗員が傾斜させたときの角度に保持される。
(もっと読む)
車両
【課題】車両が過剰に傾斜させられてしまうことがなく、旋回安定性を高くすることができるようにする。
【解決手段】傾斜部位を路面に対して傾斜させるためのアクチュエータと、走行用の駆動部と、横加速度を検出する横加速度検出部と、横加速度に基づいてアクチュエータを駆動する傾斜制御処理手段と、加速操作量を制限する条件が成立するかどうかを判断する制限条件成立判断処理手段と、加速操作量を制限する条件が成立する場合に、加速操作量を制限する加速操作量制限処理手段と、加速操作量に基づいて走行用の駆動部を駆動する走行駆動制御処理手段とを有する。制限された加速操作量に基づいて車両の走行用の駆動部が駆動されるので、車両が過剰に傾斜させられてしまうことがなくなる。
(もっと読む)
車両
【課題】旋回時にも車体の安定を維持することができ、制御安定性を向上させることができるとともに、乗員が違和感を感じることがなく、乗り心地がよく、安定した走行状態を実現することができるようにする。
【解決手段】互いに連結された操舵(だ)部及び駆動部を備える車体と、車体を操舵する操舵輪と、車体を駆動する駆動輪と、操舵部又は駆動部を旋回方向に傾斜させる傾斜用アクチュエータ装置と、前後方向に関して異なる位置に配設され、車体に作用する横加速度を検出する複数の横加速度センサと、傾斜用アクチュエータ装置を制御して車体の傾斜を制御する制御装置とを有し、制御装置は、複数の横加速度センサが検出する横加速度から、仮想横加速度検出位置における推定横加速度を算出し、推定横加速度がゼロになるように、車体の傾斜を制御する。
(もっと読む)
回転動作を直線動作に変換するための機構を含むアクチュエータ
基準フレームに対してボディのポジションを制御するよう構成されたアクティブ振動抑制デバイスが提案される。この抑制デバイスは、少なくとも一つの方向へのボディの移動に対応する入力信号を提供するセンサーと、ボディのポジションを制御するよう構成されたロータリーモーターと、ボディに対してロータリーモーターを連結する4本バーリンケージとを含む。リンケージは、モーターからの回転動作出力をボディの直線動作へと変換する。コントローラは、基準フレームセンサーからの入力信号に基づいて、基準フレームのポジションに対して少なくとも一つの方向においてボディを位置調整するためにリンケージを介して作用するロータリーモーターに制御信号を提供する。 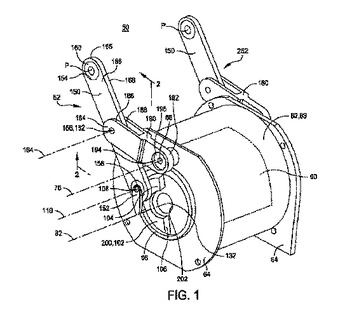 (もっと読む)
(もっと読む)
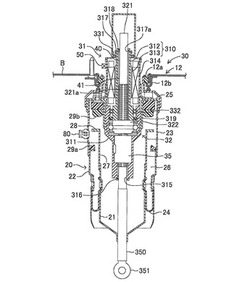
電磁緩衝器
【課題】 ボールスプラインの寿命を向上させ、サイズを小さくすることができる電磁緩衝器を提供する。
【解決手段】 電磁緩衝器1は、ハウジング7の上部を車体へ取り付ける支持手段9を備えている。支持手段9は、ねじ軸6の軸線に直交する方向の軸線を有しかつねじ軸6の軸線に対して対称に配置されている1対のニードル軸受21と、これらのニードル軸受21を保持するケーシング22と、ケーシング22上面に配置された1対のゴム弾性体23と、1対のゴム弾性体23の上面に配置されかつ車体への取付けボルト25が設けられた円板状取付金具24とを有している。
(もっと読む)
車高調整装置
【課題】車体におけるバネ下重量の増加を抑制する小型軽量化した車高調整装置を提供する。
【解決手段】車体とバネ下部材との間に介挿されるスプリングを当該スプリングの一端側から伸縮させて車体の車高を調整する車高調整装置であって、車高調整装置は、車体又はバネ下部材に固定され、ステータを保持するステータ保持部材と、ステータ保持部材の外周に沿って回転可能に設けられ、スプリングの外径よりも大径のロータを保持する円筒形状のロータ保持部材と、ロータ保持部材の内周面とボールネジ機構を構成する外周面とスプリングと当接するスプリングシートとを有するロアーリングとを備えるようにした。
(もっと読む)
車体傾動制御装置及びその方法
【課題】車体を傾動させる装置が正常でない場合に、車体の姿勢を車両の走行に適合した姿勢にする。
【解決手段】車体傾動制御装置は、車両前後方向に少なくとも2つ配置されそれぞれ、ロール方向に車体を傾動させる車体傾動装置21F,21Rと、車輪を転舵させる運転者の運転操作に応じて、各車体傾動装置21F,21Rを駆動制御する車体傾動装置駆動部25F,25Rと、各車体傾動装置21F,21Rが正常か否かを判定する車体傾動装置異常判定部31と、ロール方向の車体の姿勢を固定する車体傾動停止装置26と、を備え、車体傾動装置駆動部25F,25Rが、車体傾動装置異常判定部31が車体傾動装置21F,21Rの1つが正常でないと判定すると、車体傾動装置異常判定部31が正常と判定した車体傾動装置21F,21Rを駆動制御して、車体の姿勢をロール方向で中立姿勢にし、車体傾動停止装置26が、その中立姿勢に固定する。
(もっと読む)
インホイールモータ搭載車の車高調整機構
【課題】本発明は、インホイールモータ搭載車の車高調整機構に係り、ホイールを回転させる駆動トルクを発生するモータを2つも設けることなく車高調整を実現することにある。
【解決手段】インホイールモータ14の駆動時に車体22を持ち上げる車体持上力Fuが作用するようにホイール12側を車体22に対して保持するキャリア18と、インホイールモータ14の駆動時に車体22を引き下げる車体引下力Fdが作用するようにホイール12側を車体22に対して保持するリンク機構36と、インホイールモータ14の駆動時におけるキャリア18による車体持上力Fuの大きさとリンク機構36による車体引下力Fdの大きさとの関係を可変させる減速機30と、を備える。
(もっと読む)
車両状態制御装置及びその方法
【課題】転舵輪の転舵角と車両の傾動とを適切に協調させる。
【解決手段】車両状態制御装置は、車輪を転舵させる運転者の運転操作に応じてロール方向に車体を傾動させる車体傾動部20と、車輪を転舵させる運転者の運転操作量に対する車輪の転舵角を調整する舵角調整部44と、車輪の転舵角を検出する操舵角検出部43と、操舵角検出部43が検出した車輪の転舵角の増加に基づいて、車体の傾動の可変範囲の最大値を小さくする制御部2と、を備える。
(もっと読む)
車両のローリング挙動制御装置
【課題】構成物の横変位により操舵時のローリング挙動を抑制する際、横変位の反作用によって、操舵に伴うローリング挙動が許容限界を超えることのないようにする。
【解決手段】ローリング制御用可動構成物の横変位量制御が開始されたとき、先ず車両状態検出部21で操舵角θ、車輪速ω、ヨーレートΦ、前後加速度αxT、横加速度αyT、およびモータ回転角φを検出する。次に、可動構成物変位量目標値算出部22で、上記の操舵角θおよび車輪速ωを用い、操舵周波数が高いほど小さくなるような可動構成物のローリング挙動変化抑制用目標横変位量を演算する。その後可動構成物駆動部23で、上記可動構成物の目標横変位量と、上記ヨーレートΦ、前後加速度αxT、横加速度αyT、およびモータ回転角φとから、可動構成物の目標横変位量を実現するのに必要なモータ駆動トルク指令値を算出し、これをモータ用サーボドライバへ出力する。
(もっと読む)
姿勢安定化制御装置及び該姿勢安定化制御装置を備えた車両
【課題】車両の運動状態を動的にモニタし、安定した制御を可能とする。
【解決手段】コントローラ103は、車両の運動の目標値を設定する目標値演算部212,213と目標値に基づいて、車両の運動及び姿勢を制御するアクチュエータの制御量を制御する制御信号を生成する制御量演算部216,217と、車両の運転状態を検出する運転状態検出部と、目標値に基づいて、車両の転倒安定余裕度を求め、該安定余裕度に基づいて、車両を安定化させるための補正量を演算する目標安定余裕度演算部218と、車両の運転状態に基づいて、車両の転倒安定余裕度を求め、該安定余裕度に基づいて、車両を安定化させるための補正量を演算する実安定余裕度演算部219と、生成された制御量を、補正量を用いて補正する調停処理部222と、補正された制御量を用いて、アクチュエータを制御する駆動部と、を備える。
(もっと読む)
減衰力発生装置およびサスペンション装置
【課題】ビスカスカップリングの減衰力特性を推定して、所期の減衰力を発生する減衰力発生装置を実現する。
【解決手段】電源220は、DCモータ210に電力を供給して、ケース体12とシャフト20を第1の回転方向に相対回転させ、車輪と車体の相対距離を変化させる。第1推定手段は、電源220よりDCモータ210に電力を供給して、車輪と車体の相対距離を変化させるときにDCモータ210にかかる第1抗力を推定する。第2推定手段は、電力供給を停止したあとに、ケース体12とシャフト20が第2の回転方向に相対回転するときにDCモータ210に発生する第2抗力を推定する。第3推定手段は、第1抗力と第2抗力から、ビスカスカップリング100が発生する減衰力を導出し、減衰力特性を推定する。
(もっと読む)
車両用懸架装置
【課題】減衰力発生機構を備えたホイールベース可変の車両用懸架装置を提供すること。
【解決手段】車両用懸架装置1は、一端が車輪側に連結され、他端がアクスル62の後方で車幅方向に延在する回転軸14で車体に対して回転支持されるアッパーアーム10と、一端が車輪側に連結され、他端がアクスル62の前方で車幅方向に延在する回転軸24で車体に対して回転支持されるロアアーム20と、回転軸14のまわりをアッパーアーム10と一体になって回転する回転接触部16と回転接触部16の回転軌道CL内に固定される固定接触部72、74との組み合わせで構成される減衰力発生機構Dと、を備え、減衰力発生機構Dは、アッパーアーム10がバウンド又はリバウンド方向に回転した場合に、回転接触部16と固定接触部72又は74とを弾性的に接触させてその回転を減衰させる。
(もっと読む)
1 - 20 / 82
[ Back to top ]