
Fターム[3D301DB25]の内容
Fターム[3D301DB25]の下位に属するFターム
サスペンション用に複数CPU(各車輪毎) (15)
Fターム[3D301DB25]に分類される特許
1 - 20 / 58
減衰力調整式シリンダ装置
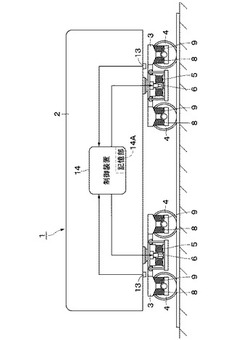
【課題】 異常を検出するときの誤検出を減らすことができる減衰力調整式シリンダ装置を提供する。
【解決手段】 減衰力可変ダンパ6は、台車3と車体2との間に連結される。減衰力可変ダンパ6には、減衰力特性を調整するアクチュエータ7が搭載されると共に、減衰力可変ダンパ6から車体2に作用する力を検出する力センサ12が内蔵されている。加速度センサ13は、車体2に設けられ、上,下方向の車体加速度を検出する。制御装置14は、正常状態と判定したときは、力センサ12と加速度センサ13の検出信号を用いて減衰力可変ダンパ6の減衰力特性を制御する。一方、制御装置14は、センサ故障状態と判定したときは、力センサ12からの検出信号を用いずに、加速度センサ13の検出信号を用いて減衰力可変ダンパ6の減衰力特性を制御する。
(もっと読む)
立体加速度値の重力細分化制御装置
【課題】 車両及び搭乗者に制止時以外の加速度が検出された場合に、その加速度に対し立体座標に於ける点対称となるように車両や座席の傾き及び高さを素早く調節することによって、搭乗者及び走行への危険性が増す状態を軽減もしくはなくすようにする立体加速度値の重力細分化制御装置を提供する。
【解決手段】 単体加速度センサーの高速な情報をXYZ軸の立体加速度値として算出し、その立体加速度値を基にダンパの加減圧を個別制御し車両や座席の高さや角度を常時変化させて、現在の走行状況もしくは予め登録している走行状況に於ける加速度を相殺する機能を搭載する基盤を設けた立体加速度値の重力細分化制御装置を特徴とする。
(もっと読む)
サスペンションシステム

【課題】車両の走行状態に拘らず、最適な乗り心地及び走行安定性を実現することが可能なサスペンションシステムを提供する。
【解決手段】サスペンションシステム100は、上側シリンダ室10Uと、下側シリンダ室10Lと、当該下側シリンダ室10Lの開口部の開口面積を調整する可変バルブ11と、を有し、車両1が有する一対の車輪2に組み込まれた一方の減衰力制御シリンダ10Aの上側シリンダ室10Uと他方の減衰力制御シリンダ10Bの下側シリンダ室10Lとを連通する第1連通路21と、一方の減衰力制御シリンダ10Aの下側シリンダ室10Lと他方の減衰力制御シリンダ10Bの上側シリンダ室10Uとを連通する第2連通路22と、第1連通路21と第2連通路22との夫々に設けられ、減衰力制御シリンダ10A、10Bの動作に応じてオイルを貯留及び排出する一対のオイル受部23と、を備える。
(もっと読む)
制振装置及び制振方法
【課題】軌道からの加振に起因し特定の周波数成分が突出して多く含まれる振動を効果的に抑制可能な制振装置等を提供する。
【解決手段】鉄道車両1の車体10の振動を抑制する制振力を発生するとともに制振力を逐次変更可能な制振力発生手段121〜124と、車体の加速度を検出する加速度検出手段131〜134と、加速度に応じて前記制振力発生手段の制振力を逐次変化させる制振力制御手段110と、鉄道車両の走行速度を検出する車速検出手段とを備える制振装置100を、制振力制御手段は、所定の特定周波数帯域の振動に対して他の周波数帯域よりも高い制振効果が得られるよう設定された制御パラメータを有し、走行速度の増加に応じて特定周波数帯域を高周波数側に推移させる構成とする。
(もっと読む)
車体傾動制御装置、車体傾動制御方法
【課題】旋回走行時に車体を旋回内側に傾動させる制御の精度を向上させる。
【解決手段】旋回走行時に車体をロール方向に沿って旋回内側に傾斜させる目標対地傾斜角φ*を算出し、旋回走行時における旋回外側へのロール運動分に相当する補償量φrを算出する。そして、目標対地傾斜角φ*及び補償量φrに応じて、駆動モータ3を駆動制御する。また、一次の応答遅れ特性をもつ車両モデル(Gy0(s))に従い、横加速度に応じて補償量φrを算出すると共に、車両モデル(Gy0(s))の時定数を、ロール等価粘性Cφとロール剛性Kφとの比に応じて決定する。また、車両モデル(Gy(s))に従い、運転者のステアリング操作及び車速に応じて、車体の横加速度を推定し、推定した横加速度に応じて補償量φrを算出する。
(もっと読む)
車両
【課題】車体の安定を維持することができ、また、旋回性能を向上させることができるとともに、乗員が違和感を感じることがなく、乗り心地がよく、安定した走行状態を実現することができるようにする。
【解決手段】互いに連結された操舵部及び本体部を備える車体と、車体を操舵する操舵可能な操舵輪と、操舵不能な非操舵輪と、操舵指令情報を入力する操舵装置と、操舵部又は本体部を旋回方向に傾斜させる傾斜用アクチュエータ装置と、操舵装置から入力された操舵指令情報に基づいて操舵輪の操舵角を変化させる操舵用アクチュエータ装置と、傾斜用アクチュエータ装置及び操舵用アクチュエータ装置を制御する制御装置とを有し、制御装置は、操舵初期に、操舵指令情報に含まれる操舵方向に車体の重心を移動させるように制御して旋回方向内側に向けた加速度を発生させる。
(もっと読む)
車体傾動制御装置、車体傾動制御方法
【課題】車体を旋回内側に傾動させるときの旋回性能を改善することである。
【解決手段】旋回走行時に車体をロール方向に沿って旋回内側に傾斜させる目標対地傾斜角φ*を設定し、設定した目標対地傾斜角φ*に応じて、駆動モータ3を駆動制御する。そして、車体の目標ヨーレートγ*を設定し、目標ヨーレートγ*及び車体のロール方向に沿った旋回内側への傾斜角に応じて、車体のヨーレートを制御する。具体的には、操舵角及び車速に応じて、車体の目標ヨーレートγ*を設定し、車体をロール方向に沿って旋回内側に傾斜させるときのキャンバスラストに起因したヨー運動分に相当するキャンバスラスト分補償量δcを算出する。そして、目標ヨーレートγ*及びキャンバスラスト分補償量δcに応じて、車体のヨーレートを制御する。
(もっと読む)
サスペンション制御装置
【課題】サスペンションのストロ−ク速度の推定精度を向上可能とする。
【解決手段】制御装置20が、車輪速ωsに基づいて、車両平面運動成分および路面外乱成分を除去した車体速の成分である基準車体速成分Vb0を算出する。続いて、算出した基準車体速成分Vb0に基づいて、サスペンションのストロ−ク速度Vzを算出する。そして、算出したストロ−ク速度Vzに基づいてサスペンションのストロ−ク状態を制御する。それゆえ、例えば、車両平面運動成分や路面外乱成分が混入し、車輪速ωsの検出精度が低下しても、基準車体速成分Vb0の推定精度の低下を抑制できる。そのため、サスペンションのストロ−ク速度Vzの推定精度を向上できる。
(もっと読む)
走行支援システム
【課題】自車両の走破性能を調整して地図上にない走行経路や災害等で不整地となった走行経路の走行を支援する。
【解決手段】他車両1が地図上にない不整地2(走行経路)を走行した際の状況に基づいて自車両3が不整地2を走行できるか否かを判断し、自車両の走破性能で走行が可能であれば自車両3の走破性能を調整して走行を支援する。
(もっと読む)
車両用制御装置
【課題】車輪のキャンバ角をアクチュエータの駆動力により調整可能な車両に対し、消費エネルギーを抑制しつつ、車輪のキャンバ角が所定角度から変化することを抑制できる車両用制御装置を提供する。
【解決手段】路面に所定値以上の凹凸が存在する場合には(S105:Yes)、その凹凸を通過する際に車両に大きなサスペンションストロークが生じ、その状態で外力が作用すると、車輪のキャンバ角が所定角度から変化する可能性がある。よって、この場合には(S105:Yes)、第2補正手段を実行することで(S121)、車両が凹凸を通過する前にキャンバ調整機構をサーボロック状態に設定しておく。その結果、外力の作用により車輪のキャンバ角が変化することをより確実に抑制することができる。
(もっと読む)
車両用制御装置
【課題】ホイール部材を回転させることで車輪のキャンバ角を調整可能な車両に対し、外力の作用によりホイール部材が初期位置から回転されることを抑制することができる車両用制御装置を提供する。
【解決手段】ホイール部材93aが外力の作用により初期位置から回転された際のキャンバ角調整装置の状態を履歴として記憶させる。よって、その履歴から傾向を把握することができるので、その傾向に基づいて、ホイール部材93aの初期位置を予め変更しておくことで、外力の作用によりホイール部材93aが初期位置から回転される確率を減らすことができる。その結果、補正手段によりホイール部材を回転させる頻度を少なくして、消費エネルギーの抑制を図ることができる。
(もっと読む)
車両状態量推定装置
【課題】車両の挙動制御時における挙動の急変を抑制することのできる車両状態量推定装置を提供すること。
【解決手段】車両1の挙動制御に用いる目標横加速度Gytを車両1の走行時における横加速度実測値Gysと横加速度推定値Gyeとに基づいて推定する車両状態量推定装置2において、横加速度実測値Gysと横加速度推定値Gyeとに基づいて目標横加速度Gytを推定する場合には、車両1の横滑りの状態に応じて横加速度実測値Gysと横加速度推定値Gyeとに重み付けを行うことにより推定すると共に、横滑りが所定値以上になった場合には横滑りの状態に関わらず横加速度実測値Gysの重み付けが大きい状態を維持し、横加速度実測値Gysと横加速度推定値Gyeとの差が所定値以下の状態が所定時間継続した場合に、横加速度実測値Gysの重み付けが大きい状態を解除する。
(もっと読む)
車両用電動ダンパ装置
【課題】車輪の上下運動を最適に減衰させて車両の乗り心地を向上させることができるとともに、早々に熱に変換されないで、しかも、常時回生させることができる車両用電動ダンパ装置とする。
【解決手段】車両用電動ダンパ装置は、車体に対する車輪の相対的な上下運動を回転運動に変換して電動モータ35L,35Rを回転させることにより上下運動を減衰させるようにし、また、車輪の上下運動を減衰させるための減衰力を電動モータが発生する。車両用電動ダンパ装置は、車輪が上下方向に変位する変位速度を算出する変位速度検出部と、変位速度に基づいて電動モータの目標駆動電流を設定する駆動電流設定部と、目標駆動電流に基づいて電動モータを駆動制御するモータ駆動部106L,106Rとを有している。
(もっと読む)
車両制御装置および車両制御方法
【課題】レーン移動動作を行う際に車両の姿勢を安定させることができなかった。
【解決手段】自車両の移動先の目標レーンを示す情報を含む推奨経路情報と、前記自車両が走行している自車走行レーンを示す情報を含む自車位置情報とを取得し、前記自車走行レーンが前記目標レーンと異なる場合に、前記自車両がレーン移動動作を行う予定であることを予測するレーン移動予測手段と、前記自車両がレーン移動動作を行う予定であると予測された場合に、前記自車両の姿勢を安定させるための安定制御を開始させるための開始条件を満たすか否かを判定する開始条件判定手段と、前記開始条件を満たすとき、前記安定制御を開始させる安定制御手段と、を備え、前記開始条件判定手段は、前記自車両がレーン区画線を跨いだ場合に前記開始条件を満たすと判定する。
(もっと読む)
車両用制御装置
【課題】車輪のキャンバ角を調整するキャンバ角調整装置を備えた車両に用いられる車両用制御装置に関し、キャンバ角の調整に伴って生じる車両の挙動特性の変化に基づく違和感を、運転者等に与えることのない車両用制御装置を提供する。
【解決手段】車両用制御装置100は、安定キャンバ付与基準データ72B等に規定された条件を満たす場合、キャンバ角調整装置44を制御し、左後輪2RL及び右後輪2RRのキャンバ角を調整する。又、車両用制御装置100は、旋回判定基準データ72Cの基準値と、加速度センサ装置80等の検出値を比較することで、車両1が旋回中であるか否かを判定する。車両1が旋回中である場合、車両用制御装置100は、安定キャンバ付与基準データ72Bに係る条件を満たしていても、キャンバ角調整装置44によるキャンバ角の調整を禁止する。
(もっと読む)
車両用制御装置
【課題】車両の走行安定性を確保しつつ操縦性を制御し、操舵感を向上できる車両用制御装置を提供すること。
【解決手段】キャンバ角調整手段によりキャンバ角調整装置44が作動され後輪のキャンバ角が調整されて後輪にネガティブキャンバが付与される。ネガティブキャンバの付与により後輪に発生するキャンバスラストを利用して、車両の走行安定性を確保できる。また、キャンバ角調整手段により後輪にネガティブキャンバが付与される場合に、コーナリングフォース変更手段により前輪の等価コーナリングフォースが変更される。前輪の等価コーナリングフォースが変更されることにより、車両の操縦性の指標である操安キャパシティを変更することができ、車両の操縦性を制御できる。これにより、車両の走行安定性を確保しつつ操縦性を制御し、操舵感を向上できる。
(もっと読む)
電力回生装置
【課題】電力回生装置において、構成部品を適切に保護する。
【解決手段】電動アクティブサスペンション装置10は、電動モータ15と、電動モータ15に駆動電力を供給すると共に、電動モータ15で発生した回生電力を受けるモータ駆動装置14と、NiH蓄電池18からの電力を変圧してモータ駆動装置14に供給すると共に、モータ駆動装置14からの回生電力を変圧してNiH蓄電池18に蓄電するDC−DCコンバータ12とを備える。モータ駆動装置14は、回生電力がDC−DCコンバータ12に伝達されるのを防止する電力伝達防止機構を備える。DC−DCコンバータ12は、供給される駆動電圧が第1所定値未満の場合、動作を停止するよう構成されている。モータ駆動装置14は、供給される駆動電圧が第2所定値未満の場合、電力伝達防止機構が作動するよう構成されている。第1所定値は、第2所定値よりも小さい値に設定される。
(もっと読む)
原動機付四輪車両
【課題】幅方向に一名しか収容できず、運転者の保護構造に統合されたシャーシと一体化した状態で作られた運転席、及びシャーシと二つの前車輪の同時傾斜により、水平との関係において傾斜した地面上及び/又はカーブ内で車両を平衡化させる手段を有し、四つの車輪を提供する。
【解決手段】四輪型原動機付車両1は、停止時及び低速時に自動的に介入する傾斜ブロック手段を有する。この車両は、停止時に車両が転倒しないような最大値に前記傾斜を制限するための手段を有している。車両は、幅が狭いので狭い場所を走行でき、また、狭い車体幅にもかかわらず、停止時、低速走行、高速度走行、カーブ内走行、段差内走行のいずれにおいても、安定を保つことができる。
(もっと読む)
エアドライヤ保護装置
【課題】コスト増を招くことなくエアドライヤ内の乾燥不足を解消することができるようにしたエアドライヤ保護装置を提供する。
【解決手段】エアコンプレッサ4とエアタンク14との間に介装され、エアコンプレッサ4からエアタンク14に供給される圧縮空気の水分を除去するエアドライヤ12を保護する装置であって、作動要求に応じてエアタンク12内の圧縮空気を使用するエア機器の作動を制御する制御手段22を備え、制御手段22は、エアドライヤ12の作動が予め設定された所定時間以上継続すると、エア機器20の作動を禁止する。
(もっと読む)
装輪戦闘車両の車高制御機構
【課題】装輪戦闘車両の俯仰角度を、実質的に大きくする。
【解決手段】装輪戦闘車両は、車体本体2上に砲台4が旋回可能に取り付けられ、砲台4には俯仰可能に砲身3が備えられている。車体本体2の右側及び左側には、懸架脚20〜90が備えられている。懸架脚20〜90は、車輪21〜91や、油気圧式ばねタンパ23〜93を有しており、油気圧式ばねダンパ23〜93の伸縮により車高調整がされる。砲身3の仰角が大きくなっていくときには、砲身3の向きがより上向きになるように、懸架脚20〜90を伸縮調整して車体本体2を傾斜させ、実質的に砲身の仰角を大きくし、砲身3の俯角が大きくなっていくときには、砲身3の向きがより下向きになるように、懸架脚20〜90を伸縮調整して車体本体2を傾斜させ、実質的に砲身の俯角を大きくする。
(もっと読む)
1 - 20 / 58
[ Back to top ]