
Fターム[3D301EA09]の内容
Fターム[3D301EA09]の下位に属するFターム
ばね上ばね下相対速度、ストローク速度 (109)
ばね上の速度 (62)
ばね下の速度 (35)
Fターム[3D301EA09]に分類される特許
1 - 12 / 12
制振装置及び制振方法
【課題】軌道からの加振に起因し特定の周波数成分が突出して多く含まれる振動を効果的に抑制可能な制振装置等を提供する。
【解決手段】鉄道車両1の車体10の振動を抑制する制振力を発生するとともに制振力を逐次変更可能な制振力発生手段121〜124と、車体の加速度を検出する加速度検出手段131〜134と、加速度に応じて前記制振力発生手段の制振力を逐次変化させる制振力制御手段110と、鉄道車両の走行速度を検出する車速検出手段とを備える制振装置100を、制振力制御手段は、所定の特定周波数帯域の振動に対して他の周波数帯域よりも高い制振効果が得られるよう設定された制御パラメータを有し、走行速度の増加に応じて特定周波数帯域を高周波数側に推移させる構成とする。
(もっと読む)
車両用サスペンション制御装置

【課題】車体と車輪との間の上,下方向の相対速度が0付近で頻繁に変化する場合でも、車両の振動を緩衝することができ、振動や異音の発生を抑えることができる車両用サスペンション制御装置を提供する。
【解決手段】ばね上加速度センサ8、ばね下加速度センサ9、減算器13および積分器12によって、車体と車輪との間の上,下方向の相対速度V2を検出する。そして、検出された相対速度V2を、相対速度補正部15で補正し、補正相対速度V2ofsを出力する。ここで、相対速度補正部15は、相対速度V2が閾値K1よりも小さく閾値K2よりも大きい範囲では、補正相対速度V2ofsとして正負が反転しない値を出力する。これにより、発生減衰力がハードとソフトとの間でチャタリングを起こすように変化するのを防止する。
(もっと読む)
タイヤばね定数推定方法およびタイヤのばね定数を推定可能な車両用サスペンションシステム
【課題】車体の振動と車体と車輪との相対振動との一方である対象振動の強度に基づくタイヤばね定数推定方法およびその方法を実行可能な車両用サスペンションシステム。
【解決手段】車輪と車体との間に配設された装置に特定接近離間力f0を発生させる工程(S12)と、その接近離間力によって生じる対象振動の強度ΔVuを検出する工程(S19)と、その検出された振動の強度に基づいて、接近離間力と対象振動の強度との関係を表す伝達関数を利用して、タイヤのばね定数KTを推定する工程(S20)とを含む推定方法において、伝達関数が、タイヤのばね定数を係数として有しており、その係数の値の変化に伴って接近離間力と対象振動の強度との関係が変化するようにされており、伝達関数での接近離間力が特定接近離間力とされた場合の対象振動の強度が、検出される対象振動の強度となるような上記係数の値をタイヤのばね定数として推定するように構成する。
(もっと読む)
車両用サスペンション装置、電動モータの制御方法、及びアクチュエータ制御装置
【課題】電動モータによる発生推力をより推力指令値に近い状態に制御可能とする。
【解決手段】電動モータが発生する推力で車輪2の上下位置を規制する。その際に、推力指令値T1と実推力T0との偏差に応じたフィードバック補償量HF1とフリクション補償量HF2との2つの補償量で、上記電動モータへの推力指令値T1を補償する。このとき、上記推力指令値T1に対する上記2つの補償量を、サスペンションの上下ストローク速度VSに応じて変更する。
(もっと読む)
電磁デバイスシステム及びその制御方法
【課題】相互に独立した一対の電磁デバイスを連結した電磁デバイス回路によって電磁デバイスを制御して、該電磁デバイスを介して懸架される被懸架部材における2自由度の減衰特性を個別に制御可能とすることによって、自動車等のサスペンションに適用した場合に、所望の特性を発揮することができるようにする。
【解決手段】相互に独立した一対の電磁デバイス、及び、外部抵抗又は電源を含む電磁デバイス回路10と、前記外部抵抗又は電源を制御する制御装置とを有する電磁デバイスシステムであって、各電磁デバイスは変位可能な作動部を備え、前記制御装置は、前記外部抵抗又は電源を制御して、前記一対の電磁デバイスを介して懸架された被懸架部材における2自由度の減衰特性を個別に制御する。
(もっと読む)
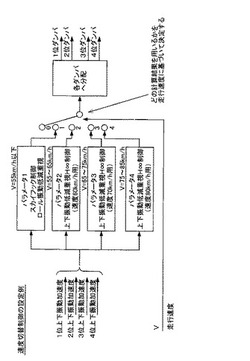
車両の走行制御装置
【課題】車両の走行制御において、特に制動時により制動距離を短くし、かつそのときにスピンを防止するためには、車両運動を表す前後速度と左右速度,上下速度,ピッチ角,ロール角,横すべり角の6個の物理量を計測し、各車輪の制動力と各懸架のショックアブソーバの減衰係数を制御する必要がある。このとき、速度や角度を直接計測するセンサを装備する必要がある。
【解決手段】前後速度と左右速度を直接計測するために4つのレーダセンサを使用する。また、上下速度,ピッチ角,ロール角,横すべり角をレーダセンサの出力から間接的に計測。
【効果】3個または4個のレーダセンサを用いることにより、前後速度と左右速度,上下速度,ピッチ角,ロール角,横すべり角の6個の物理量を計測できる。また、2個のレーダセンサを用いることにより、前後速度と左右速度,横すべり角の3個の物理量を計測できる。
(もっと読む)
車両の電子制御システムおよびその制御方法
【課題】メインコントローラと少なくとも一つのローカルコントローラとの間に通信を行うと共に、相互間の情報を考慮して、制動装置および懸架装置を制御することにより、各コントローラの固有特性をさらに改善し、かつ、活性化させることができるのみならず、システムも単純化させることができる車両の電子制御システムおよびその制御方法を提供すること。
【解決手段】車両の情報を受信し、車両の制動制御信号および懸架制御信号を生成して出力するメインコントローラと、メインコントローラにより出力された懸架制御信号に応じて、各車輪のダンパを制御する少なくとも一つのローカルコントローラと、メインコントローラとローカルコントローラとの間のデータ通信を行うインターフェース部と、を備える。
(もっと読む)
サスペンションシステム
【課題】サスペンション装置が有する電磁アクチュエータの負担を軽減することができる等、より実用的なサスペンションシステムを得る。
【解決手段】4つのサスペンション装置10の各々が有する4つの電磁アクチュエータ20についての4つの制御力目標値F1〜F4に、ワープ成分Waを加算してそれらの絶対値を平均化する。図示の例では、絶対値が最大の最大目標値はF1=9であり、ワープ成分Wa=−2を加算することによって、その値をF1’=7に減少させることができる。また、最大目標値以外の3つの制御力目標値F2〜F4の各々に、設定された処理によって決定されたワープ成分Wa=−2を加算又は減算することによってF2’〜F4’が得られる。このような平均化処理によって、ヒーブH,ロールR,ピッチPに与える影響を抑制しつつ最大目標値を減少させ、電磁アクチュエータの負担を軽減することができる。
(もっと読む)
可変減衰力ダンパの制御装置
【課題】 可変減衰力ダンパの減衰力の切換時に車両挙動の特性が変化してドライバーに違和感を与えるのを防止する。
【解決手段】 可変減衰力ダンパの電子制御ユニットUは、車輪を車体に懸架するサスペンションのダンパのアクチュエータ5に通電することで、その減衰力を車両挙動に応じて変更するとともに、減衰力切換スイッチ20の操作によって減衰力を操安性重視の高減衰状態と乗り心地重視の低減衰状態とに切り換える。減衰力切換スイッチ20を操作してからダンパの減衰力が変化するまでのタイミングを、車両挙動判定部M6で判定した車両挙動に応じて変更するので、車両に強い横加速度や強い前後加速度が作用している状態でダンパの減衰力が変化するのを防止し、減衰力の急変によって車両挙動の特性が変化するのを防止してドライバーの違和感を解消することができる。
(もっと読む)
車両に搭載された少なくとも一つのスタビライザーバーのアクチュエータをコントロールする方法
本発明は、車両に搭載された少なくとも一つのスタビライザーバーのアクチュエータをコントロールする方法に関する。特に、車両のコントロール方法では、少なくとも一つのスタビライザーのアクチュエータは、車両の横方向加速度の測定値の関数としてコントロールされる。 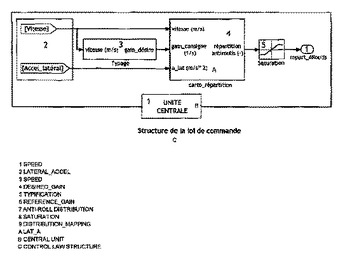 (もっと読む)
(もっと読む)
ショックアブソーバ
【課題】所定の振動数において、圧側、伸び側の何れの方向に移動する場合でも減衰力を機械的に制御する。
【解決手段】ばね下振動に対して可動マス22を共振させ、この可動マス22と連動するオリフィス24により、ピストン上室とピストン下室とを連通する第1のバイパス、及びピストン下室とリザーバ室とを連通する第2のバイパスの開閉状態を切り替える。大入力ばね下共振時には、伸び側、圧側に応じて所定のバイパスを閉状態から開状態とすることにより、バイパスが連通させている2つの室相互間の圧力差を制御して減衰力を低下する。
(もっと読む)
シャーシ用の閉じた空気供給設備における空気量制御方法
閉じた空気供給設備における空気量制御を簡単化するために、空気ばね(3,4)の一定の動きから、平均的な制御速度を算出して、最適な制御速度と比較することを提案する。この場合、この制御速度の比較から、圧縮空気量の不足又は過剰を決定する。平均的な制御速度を算出するために、三つの異なる可能性を提示する。  (もっと読む)
(もっと読む)
1 - 12 / 12
[ Back to top ]