
Fターム[3D301EA10]の内容
車体懸架装置 (72,824) | 入力信号 (10,935) | 車両の姿勢、状態 (6,036) | 速度 (1,150) | 上下方向速度 (218) | ばね上ばね下相対速度、ストローク速度 (109)
Fターム[3D301EA10]に分類される特許
1 - 20 / 109
サスペンション制御装置
【課題】車両振動の各振動成分の各バネ上挙動を抑制する。
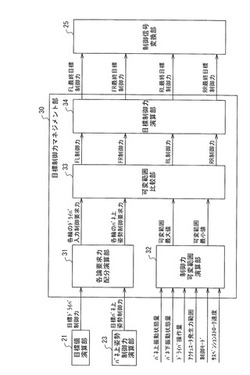
【解決手段】サスペンション制御装置は、減衰させる制御力の出力可能な範囲を算出する制御力可変範囲演算部32と、制御力可変範囲演算部32が算出した出力可能な範囲と車両振動のバウンス振動成分、車両振動のピッチ振動成分、及び車両振動のロール振動成分のうちの少なくとも2つの振動成分から算出された各制御力とをそれぞれ比較し、車両振動のバウンス振動成分、車両振動のピッチ振動成分、及び車両振動のロール振動成分のうちの前記少なくとも2つの振動成分について前記出力可能な範囲内の制御力を抽出する可変範囲比較部33と、可変範囲比較部33が抽出した各制御力に基づいて、各輪の目標制御力を算出する目標制御力演算部34と、目標制御力演算部34が算出した目標制御力に基づいて、ACTR部を制御する制御信号変換部25とを備える。
(もっと読む)
減衰力調整式緩衝器

【課題】減衰力調整式緩衝器において、ピストンロッドに作用する横力を考慮して正確な減衰力制御を行なうことができるようにする。
【解決手段】コントローラCにより、各種センサの検出信号に基づき、車両の走行状態に応じて減衰力調整式緩衝器1の減衰力調整機構6のソレノイド7に制御電流を供給して、減衰力をリアルタイム制御することにより、車両の操縦安定性及び乗心地を向上させる。減衰力調整式緩衝器1のピストンロッド5に歪センサ19を装着する。コントローラCにより、歪センサ19の検出信号に基づき、ピストンロッド5に作用する横力を演算し、この横力によって生じるピストロッドとロッドガイドとの間の摩擦力に基づき、ソレノイド7への制御電流を補正することにより、正確な減衰力制御を行なう。
(もっと読む)
サスペンション制御装置
【課題】 オーバーステアを軽減して、車両の安定性を高めるようにする。
【解決手段】 車体1には操舵角δを検出する操舵角センサ12と実ヨーレートrを検出するヨーレートセンサ13を設ける。コントローラ15は、操舵角δと実ヨーレートrに基づいて、車両がオーバーステアか否かを判断する。そして、コントローラ15は、車両がオーバーステア状態と判断した場合には、操舵角δに基づく目標ヨーレートr0と実ヨーレートrとの差分に応じて、後輪側の減衰力指令信号IRRを制御する。これにより、車両がオーバーステア状態となったときに、車体1の両後輪3のうち、縮み行程の減衰力をハードに、伸び行程の減衰力をソフトに調整する。
(もっと読む)
サスペンション装置
【課題】 サスペンション装置の大型化を抑制しつつ電磁アクチュエータのフェイルセーフ機能を設ける。
【解決手段】 電磁アクチュエータ30は、電動モータ31とボールネジ機構32とを備える。電動モータ31は、円筒状のロータ310を備え、このロータ310はボールネジナット322に連結される。ボールネジナット322と螺合するボールネジ軸321は、ロータ310の中空部に隙間をあけて挿通される。ロータ310とボールネジ軸321との隙間には粘性油40が封入される。バネ上部材とバネ下部材とが上下方向に相対運動すると、ロータ310とボールネジ軸321との間に封入された粘性油に粘性せん断力が発生し、この粘性せん断力が、バネ上部材とバネ下部材との相対運動を減衰させる。
(もっと読む)
サスペンション制御装置
【課題】車体と車輪との間の上,下方向の相対速度が0付近で頻繁に変化する場合でも、車両の振動を緩衝することができ、振動や異音の発生を抑えることができる車両用サスペンション制御装置を提供する。
【解決手段】ばね上加速度センサ8、ばね下加速度センサ9、減算器13および積分器12によって、車体1と車輪2との間の上,下方向の相対速度V2を検出する。そして、検出された相対速度V2を、相対速度補正部15で補正し、補正相対速度V2ofsを出力する。ここで、相対速度補正部15は、相対速度V2が高周波のときには、補正相対速度V2ofsとして所定の値(例えば、直前の制御周期の補正相対速度V2ofs_Z)を出力する。相対速度V2が低周波のときには、補正相対速度V2ofsは、相対速度V2の符号(正負)の切換りに応じてその符号(正負)が切換わるようにする。
(もっと読む)
車体振動制御装置、および車体振動制御方法
【課題】輪荷重の変動を抑制しつつ、操舵応答性の向上およびロール挙動の抑制を可能とする。
【解決手段】車体のばね上挙動を構成する成分のうち、駆動トルクTwに起因する成分の変動を抑制する駆動トルクを算出し、算出した駆動トルクにゲインK1(>0)を乗算する。また、上下力Fzf、Fzrに起因する成分の変動を抑制する駆動トルクを算出し、算出した駆動トルクにゲインK2(>0)を乗算する。さらに、旋回抵抗Fcf、Fcrに起因する成分の変動を抑制する駆動トルクを算出し、算出した駆動トルクにゲインK3(<0)を乗算する。これにより、当該変動を助長する方向の駆動トルクとする。そして、これらの乗算結果を合計し、合計値を基にドライバ要求トルクを補正する。
(もっと読む)
緩衝器の制御装置
【課題】スカイフック制御を利用して緩衝器が発生する減衰力を制御する制御装置において、簡便な方法でばね下振動を抑制すること。
【解決手段】車両におけるばね上部材31とばね下部材32との間に介装される緩衝器1が発生する減衰力を制御する緩衝器1の制御装置100において、車速とストローク速度とに基づいて緩衝器1が発生する減衰力を制御する第2制御部44と、ストローク速度に基づいてばね下部材32の振動状態を判定する判定部41と、緩衝器1が発生する減衰力がスカイフック制御されている状態で、判定部41にてばね下部材32の振動が予め定められた振動状態に達したと判定された場合には、緩衝器1が発生する減衰力を第2制御部44にて制御するように切り換える制御切換部42とを備える。
(もっと読む)
車両用電動ダンパ装置
【課題】車輪の上下運動を最適に減衰させて車両の乗り心地を向上させることができるとともに、早々に熱に変換されないで、しかも、常時回生させることができる車両用電動ダンパ装置とする。
【解決手段】車両用電動ダンパ装置は、車体に対する車輪の相対的な上下運動を回転運動に変換して電動モータ35L,35Rを回転させることにより上下運動を減衰させるようにし、また、車輪の上下運動を減衰させるための減衰力を電動モータが発生する。車両用電動ダンパ装置は、車輪が上下方向に変位する変位速度を算出する変位速度検出部と、変位速度に基づいて電動モータの目標駆動電流を設定する駆動電流設定部と、目標駆動電流に基づいて電動モータを駆動制御するモータ駆動部106L,106Rとを有している。
(もっと読む)
サスペンション装置
【課題】緩衝器の発生減衰力の急変を緩和して車両における乗り心地を向上することができるサスペンション装置を提供することである。
【解決手段】上記目的を達成するために、本発明の課題解決手段は、車両における車体と車輪との間に介装されて車体と車輪との上下方向の相対移動を抑制する減衰力を発揮する緩衝器2と、減衰力を調節する減衰力調整機構3と、目標減衰力に基づいて当該減衰力調整機構3を制御する制御装置4とを備えたサスペンション装置1において、制御装置4は、緩衝器2の伸縮速度が0および所定速度における緩衝器の発生減衰力の変化を緩和するように目標減衰力を補正する補正手段43を備え、当該補正手段43は、緩衝器2の伸縮速度xが速度閾値Vp2を超えると当該伸縮速度xが0となるまでは、速度閾値Vp2と所定速度Vp1の差分βだけ速度増側へオフセットして発生減衰力を補正し、当該差分βから0までは発生減衰力を最小とするよう補正する。
(もっと読む)
車両制御装置
【課題】制御可能なスタビライザを備えた車両における消費エネルギーを低減することができる車両制御装置を提供すること。
【解決手段】車両1のサスペンション4の減衰力を変化させる減衰力可変機構20、あるいはサスペンションの弾性力を変化させる弾性力可変機構の少なくともいずれか一方と、車両に生じるロール方向の振動を抑制するアンチロールモーメントを可変制御する制御量可変スタビライザ10と、を備え、操舵状態と車両に生じる振動に応じて制御量可変スタビライザの制御量を設定する。
(もっと読む)
サスペンション制御装置
【課題】車体姿勢を目標姿勢に追従させる。
【解決手段】車体の目標姿勢と、この目標姿勢を実現するために必要な目標制御量とを設定し(ステップS2、S3)、目標姿勢と実際の車体姿勢との姿勢偏差をフィードバック項として算出し(ステップS4)、この姿勢偏差に基づいて、車体姿勢を目標姿勢に一致させるために必要な補正量を算出する(ステップS5)。そして、補正量に応じて目標制御量を補正し(ステップS6)、補正した目標制御量に応じてアクチュエータを駆動制御することで、サスペンションストロークの制御を行う(ステップS7)。
(もっと読む)
サスペンション装置
【課題】緩衝器の発生減衰力の急変を緩和して車両における乗り心地を向上することができるサスペンション装置を提供することである。
【解決手段】上記目的を達成するために、本発明の課題解決手段は、車両における車体と車輪との間に介装されて車体と車輪との上下方向の相対移動を抑制する減衰力を発揮する緩衝器2と、減衰力を調節する減衰力調整機構3と、目標減衰力に基づいて当該減衰力調整機構3を制御する制御装置4とを備えたサスペンション装置1において、制御装置4は、緩衝器2の伸縮速度が0および所定のダンパ速度閾値における緩衝器の発生減衰力の変化を緩和するように目標減衰力を補正する補正手段43と、補正手段43における演算で使用する緩衝器2の伸縮速度を当該伸縮速度の変化に応じて補正する速度補正手段44を備えた。
(もっと読む)
サスペンション装置
【課題】緩衝器の発生減衰力の急変を緩和して車両における乗り心地を向上することができるサスペンション装置を提供することである。
【解決手段】上記目的を達成するために、本発明の課題解決手段は、車両における車体と車輪との間に介装されて車体と車輪との上下方向の相対移動を抑制する減衰力を発揮する緩衝器2と、減衰力を調節する減衰力調整機構3と、目標減衰力に基づいて当該減衰力調整機構3を制御する制御装置4とを備えたサスペンション装置1において、制御装置4は、緩衝器2の伸縮速度が0および所定のダンパ速度閾値における緩衝器の発生減衰力の変化を緩和するように目標減衰力を補正する補正手段43を備える。
(もっと読む)
サスペンション装置
【課題】インパクトショックのばね上部材への伝達を効果的に低減することができ、かつ、経済的なサスペンション装置を提供することである。
【解決手段】上記目的を達成するために、本発明の課題解決手段は、車両におけるばね上部材とばね下部材との間に介装されてばね上部材とばね下部材との相対移動を抑制する減衰力を発揮する緩衝器2と、当該緩衝器2における減衰力を調節可能な減衰力調整機構3と、当該減衰力調整機構3を制御する制御装置4とを備えたサスペンション装置1において、制御装置4は、上記緩衝器2の収縮速度が所定の速度閾値α以上となるとともに、収縮速度の変化量が所定の速度変化量閾値β以上となると、当該緩衝器2の収縮側減衰力を最小とすることを特徴とする。
(もっと読む)
サスペンション装置
【課題】 高周波振動入力時にダンパ装置が所望の減衰力を発生するように構成されたサスペンション装置を提供すること。
【解決手段】 本発明のサスペンション装置は、モータ31の回転角速度Vmを取得する状態量演算部51と、状態量演算部51により取得された回転角速度Vmに基づいて、回転角速度Vmの高周波成分に対する減衰力(モータ減衰力fmの高周波成分)fm_filtを演算する減衰力演算部(524,525)と、モータ31が減衰力演算部により演算された減衰力を発生するように、モータ31が出力すべき目標制御力fを演算する目標制御力演算部526と、を備える。そして、目標制御力演算部526により演算された目標制御力fに基づいてモータ31を制御する。
(もっと読む)
減衰力可変ダンパの制御装置
【課題】バネ上が高い周波数で小さく振動するときにも振動を吸収するようにスカイフック制御することが可能な減衰力可変ダンパの制御装置を提供することを課題とする。
【解決手段】ダンパ1aのバネ上速度が高いほどダンパ1aの減衰力が高くなるように減衰力制御量を設定し、バネ上速度の方向とダンパ1aのストローク速度の方向が同方向の場合に、減衰力制御量に基づいて減衰力を制御するスカイフック制御を行う減衰力可変ダンパ1の制御装置20とする。そして、ストロークセンサ14が検出するストローク変位に基づいて算出されるダンパ1aの振幅が小さくなるにつれて、ダンパ1aの減衰力が低くなるように減衰力制御量を補正することを特徴とする。
(もっと読む)
車体姿勢制御装置
【課題】 車両走行時の旋回操作性、操縦安定性、乗り心地を向上することができるようにした車体姿勢制御装置を提供する。
【解決手段】 車両走行時のタイヤが常用領域にある間は、ロールレイトに応じて目標ピッチレイトを算出するピッチ制御部23の方をロール抑制部18よりも優先させる。この場合、ピッチ制御部23で算出した目標減衰力に重みを与え、前記目標ピッチレイトとなるように各ダンパ6,9の減衰力特性を制御する。タイヤの路面グリップ状態が悪い限界領域では、ピッチ制御部23よりもロール抑制部18の方を優先させ、ロール抑制部18で算出した目標減衰力に重みを与える。これにより、ロール抑制制御量を大きくするように各ダンパ6,9の減衰力特性を制御する。
(もっと読む)
車両の統合制御装置
【課題】自動操舵機構の有する過渡時における応答性の問題を適切に補償して、通常走行時の快適性を保つことはもちろん、理想のハンドリング性能を実現する。
【解決手段】制御ユニット50の操舵制御部20では、ハンドル角θHd、ハンドル角速度(dθHd/dt)により目標舵角δtを算出し、モータ回転角θMを算出して、このモータ回転角θMを、ギヤ、モータの慣性等に起因する振動を抑制する為、所定のローパスフィルタによる処理や不感帯処理を行って、モータ駆動部21に出力する。サス_ECU40では、ハンドル角速度(dθHd/dt)に基づいて、減衰力補正基本値Cpを設定し、減衰力補正値Cを算出して、ストローク速度(dST/dt)、減衰力補正値Cを基に減衰力Faを設定し、所定のローパスフィルタによる処理等を行って出力する。
(もっと読む)
サスペンション装置
【課題】 アクチュエータのストッパ当たりが効果的に防止されるアクティブサスペンション装置を提供すること。
【解決手段】 本発明のサスペンション装置は、電動アクチュエータ10と、電動アクチュエータ10の出力を制御するサスペンションECU30とを備える。サスペンションECU30は、バネ上部材の運動およびバネ下部材の運動を抑制するように、電動アクチュエータ10の出力を制御する第1制御と、電動アクチュエータの伸縮ストロークが、第1制御により電動アクチュエータ10の出力を制御した場合における電動アクチュエータ10の伸縮ストロークよりも小さくなるように、バネ上部材およびバネ下部材の上下変位および上下速度に基づいて、電動アクチュエータ10の出力を制御する第2制御とを、ストッパ当たりが発生する可能性が高いか否かに基づいて、切り換える。
(もっと読む)
サスペンション装置
【課題】インパクトショックを効果的に低減するとともに悪路旋回中における乗り心地をも向上することができるサスペンション装置を提供することである。
【解決手段】上記目的を達成するために、本発明の課題解決手段は、上記ばね下部材に作用する車両前後方向の加速度を検知する加速度検知手段5と、加速度検知手段で検知した加速度から車両が悪路を走行中であることを判定する悪路判定手段と、車両旋回を検知する旋回検知手段6とを備え、車両旋回を検知しないか悪路を走行中でない場合、上記加速度が所定の閾値を超えると緩衝器2における減衰力のうち少なくとも圧側減衰力を最小減衰力とするとともに、車両旋回を検知する場合であって車両が悪路を走行中であると判定された場合には緩衝器2における減衰力のうち少なくとも圧側減衰力を上記最小減衰力以上であって通常制御における圧側減衰力以下の小減衰力とする。
(もっと読む)
1 - 20 / 109
[ Back to top ]