
Fターム[3F022QQ20]の内容
Fターム[3F022QQ20]に分類される特許
1 - 20 / 26
電動式移動棚
【課題】構成および動作が簡単でありながら所期の均等分散動作を迅速、円滑に行うことができる電動式移動棚を得る。
【解決手段】複数の移動棚がモータ14の駆動力により集合離散可能に並べられた電動式移動棚システムを構成する個々の電動式移動棚が、両側に隣接する移動棚または固定部との距離である通路幅を計測する距離センサ17,18と、操作されることにより均等分散信号を出力する均等分散指令部と、均等分散信号が出力されると、距離センサの出力信号によって一方側に隣接する移動棚または固定部との通路幅と他方側に隣接する移動棚または固定部との通路幅を比較し、比較結果から通路幅の広い方に向かって移動棚が移動するようにモータ14を駆動し、両側の通路幅が等しくなるとモータの駆動を停止する均等分散制御部16と、を備えている。
(もっと読む)
搬送車

【課題】被搬送物の位置ずれを効率良く補正することができる搬送車を提供する。
【解決手段】搬送車1は、走行台車3と、ターンテーブル9と、カセットW載置すると共に、所定の伸縮方向に沿って伸縮してカセットWを出し入れする移載装置11と、移載装置11にカセットWが載置されたときに、伸縮方向におけるカセットWの第1位置を検出する第1位置検出センサ13と、移載装置11にカセットWが載置されたときに、伸縮方向に水平面で直交する方向におけるカセットWの第2位置を検出する第3位置検出センサ17と、移載装置11がカセットWを取り込んでからカセットWの移送先に到達するまでに、カセットWの位置ずれの補正量を算出し、補正量を加味した走行台車3の移動量、ターンテーブル9の回転量及び移載装置1の伸張量を設定するコントローラ19とを備える。
(もっと読む)
保管及び取り出しシステム
【課題】個々のケースユニットを効率的に保管して取り出すための保管及び取り出しシステムを提供する
【解決手段】取り出し通路130A、取り出し通路内に配されている保管場所、及び少なくとも1つの搬送デッキ130Bを有する保管レベルの垂直アレイと、非収容ケースユニットを受け取る保管レベルの垂直アレイへかつそこから非収容ケースユニットを搬送するマルチレベル垂直コンベヤシステム150A、150Bと、保管レベルの各々に配置されて、保管場所の各々とマルチレベル垂直コンベヤシステム150A、150Bとの間で非収容ケースユニットを搬送する少なくとも1つの自立搬送装置110と、搬送デッキ130B及び取り出し通路130Aを通って保管場所のうちの所定の1つに達する主アクセス経路を生成し、かつ主経路が通過不可能な場合に保管場所のうちの当該所定の1つに達する副経路を生成するコントローラ120とを含む。
(もっと読む)
移動体と搬送システム及び搬送方法
【課題】簡単な処理で、2次元あるいは3次元のスペースを移動する移動体間の干渉を防止する。
【解決手段】2次元方向に移動自在な搬送用の移動体2を複数設け、移動体2が移動する予定の軌跡を移動体2毎に算出する軌跡算出手段16と、他の移動体2が移動する予定の軌跡を把握する軌跡把握手段と、移動体2間の軌跡の重なりの有無を、軌跡が重なる箇所の通過時刻を無視して判定するための判定手段と、軌跡が重なると判定した際に、軌跡が重なる箇所を迂回するように迂回路を算出するための迂回路算出手段16、とを備える。
(もっと読む)
物品管理システム
【課題】
本発明は、限られた空間内で管理保管される物品の登録探索において、コンピュータシステムによる管理と比較し、コンピュータ操作に不慣れな管理者でも容易に運用を可能とし、物品探索時の人的手間の削減を可能とする物品管理システムを提供する。
【解決手段】
本発明によれば、コンピュータシステムを必要とせず、階層化された収納容器にCPU及び大容量メモリーを内蔵した通信タグを取付け、一方で小型軽量可搬型の専用情報登録検索装置を準備するのみで、簡単に管理が可能となり、上記課題を解決するものである。
(もっと読む)
個別包装薬剤自動供給装置
【課題】丸もの薬剤11を袋12に密封した個別包装薬剤10を多数収納しておいて姿勢良く而も確実に逐次供給するコンパクトな個別包装薬剤自動供給装置60を実現する。
【解決手段】鉛直面で循環移動しうる無端条帯41の外周に多数の個別収容部材20が列設されており無端条帯41の上側部分が水平に張られており個別収容部材20が丸もの薬剤11より高さの低い上面解放の箱体からなり個別包装薬剤10を一つ立てて収容しうるようになっている整列収納順次排出機構部40と、その整列収納薬剤のうち先頭薬剤が無端条帯41の循環移動に伴って前に倒れてほぼ水平になるところに受けローラ54が軸方向を水平にして且つ無端条帯41の上側部分の進行方向と直交させて設けられており受けローラ54を軸回転させて先頭薬剤を個別収容部材20から抜き取る取出機構部50とを備える。受けローラ54の上方に押えローラ55も設ける。
(もっと読む)
自動倉庫
【課題】物品の汚染が拡大するのを防止することが可能な搬送車システムを提供する。
【解決手段】物品8を収納する棚を有するラック2と、棚に物品8を出し入れするスタッカクレーン1と、スタッカクレーン1の動作を制御する制御部31及び衝突防止部35とを備え、スタッカクレーン1は、物品8が載置され、棚に出入りするスライドフォーク20と、スライドフォーク20の棚に挿入される挿入部分に設けられた、スライドフォーク20の挿入部分と棚との上下方向の距離を計測する距離センサ29とを有し、制御部31及び衝突防止部35は、距離センサ29により計測された距離が閾値より小さい場合に、スタッカクレーン1の動きを制限する。
(もっと読む)
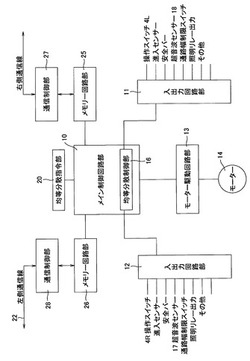
移動棚設備
【課題】本発明は、簡単な操作で、走行経路方向とは直角な方向の幅ずれを解消できる移動棚設備を提供することを目的とする。
【解決手段】各移動棚11の操作パネル40に、移動棚11を走行経路方向と直角な左右方向の一方向に予め設定された幅、移動を指令するHP移動押釦スイッチ54と、移動棚11を前記左右方向の他方向に予め設定された幅、移動を指令するOP移動押釦スイッチ55を設け、前記HP移動押釦スイッチ54が操作されると、予め設定された、一方向の走行軌跡に沿うように各駆動モータの回転速度を制御し、予め設定された幅移動させ、OP移動押釦スイッチ55が操作されると、予め設定された、前記他方向の走行軌跡に沿うように各駆動モータの回転速度を制御し、予め設定された幅移動させる構成とする。
(もっと読む)
移動棚装置及び移動棚装置の制御方法
【課題】移動が禁止された移動棚をより確実に停止させた状態に保つこと。
【解決手段】形成された通路14(3)に隣設する移動棚10(3)、10(4)の移動が禁止された状態で、移動を禁止された移動棚10(3)、10(4)に隣設する移動棚10(2)を、移動を禁止された移動棚10(3)に向けて移動させる場合に、非接触近接検知部26からの出力に基づいて、移動を禁止された移動棚10(3)の隣の移動棚10(2)を、移動を禁止された移動棚10(3)に接触する前に停止させる。
(もっと読む)
移載装置及び移載方法
【課題】色や光具合による在荷の誤検知をなくすとともに、反射ミラーや取付ブラケット、それらの取付工数を不要とし、大幅にコストを低減することができる移載装置を提供すること。
【解決手段】フォーク装置1に、保管棚の任意の棚に超音波を照射するとともに、該棚に在荷するカセット3からの反射を検出する超音波センサー4を設ける。
(もっと読む)
物品搬送装置
【課題】適正に移載を行うことができながら、物品搬送にかかる時間の短縮化を図ることができる物品搬送装置の提供。
【解決手段】移載装置12には、上下方向に幅を有する範囲を検出範囲Kとして、ビーム8までの上下方向の距離を検出するビーム検出センサ22が設けられ、制御手段は、上下方向において目標移載位置よりも手前に移載装置12を移動させたときにビーム検出センサ22にてビーム8までの上下方向の距離を検出するビーム検出作動を行い、そのビーム検出作動におけるビーム検出センサ22の検出情報に基づいて目標移載位置に移載装置12を昇降させるべく、昇降駆動手段の作動を制御するように構成されている。
(もっと読む)
ピッキング設備
【課題】本発明は、各ピッキングゾーンにおいて、複数の物品集品容器に対して仮置きができるともに、前後のピッキングゾーンにおけるピッキング作業の手助けを可能とするピッキング設備を提供することを目的とする。
【解決手段】作業者によりピッキングデータに基づいて物品5を先行仮置台25(第1投入部27)に投入するピッキング作業を行っているとき、この先行仮置台25(第1投入部27)上の物品5を投入する物品集品容器6が上流のどのピッキングゾーン8にあるかが先行投入表示器32に表示される。よって、作業者は、先行仮置台25(第1投入部27)に対して実行しているピッキング作業が時間的に余裕があるピッキング作業なのか否かを判断でき、余裕があるとき、前後のピッキングゾーンにおいて近くに物品集品容器6が移動してきて未だピッキングが実行されているときに手助けすることができる。
(もっと読む)
物品位置検出システム
【課題】多数の物品が段積みされた状態で収納されていても、各物品の位置を確実に検出可能とする。
【解決手段】各々について、三次元位置を示す情報が登録されるとともに、固有のID情報が付され、ID情報を示す赤外線と超音波を床面に向けて発信する複数の発信機3a〜3jと、複数の物品4a〜4xの何れかの近傍に位置したときに、その物品の識別情報を読み取るとともに、複数の発信機3a〜3jから発信される赤外線及び超音波の何れかを受信し、赤外線からID情報を読み取る端末機6a、6bと、端末機6a、6bで読み取られたID情報と、複数の発信機3a〜3jの各々の三次元位置を示す情報とに基づいて、識別情報を読み取った物品の位置を検出するコンピュータ10とを備える。複数の発信機3a〜3jは、赤外線及び超音波の発信方向が固定され、また、赤外線及び超音波の送信エリア33c、33eが相互に重ならないように配置される。
(もっと読む)
フォーク装置及び自動倉庫
【課題】フォーク全体の厚みを増すことなく、トップフォーク又は該トップフォーク上の物品の移動位置を直接検出することができるようにする。
【解決手段】フォーク装置23は、支持枠24と、支持枠24の底壁241上で矢印Lの方向に往復動可能な第1フォーク25と、第1フォーク25上で矢印Lの方向に往復動可能な第2フォーク26とを備えている。支持枠24の側枠242の内側にはレーダー31が設けられている。レーダー31は、第2フォーク26の移動領域の側方にあり、第2フォーク26の移動位置がレーダー31によって検出される。フォーク装置23の一部であるレーダー31は、第2フォーク26の座標を検出する。
(もっと読む)
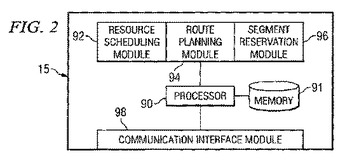
移動駆動ユニットの動きを調整するシステムおよび方法
一つまたは複数の移動駆動ユニットを作業スペース内で動かす方法が、第一の移動駆動ユニットから、第一の方向に動くために第一の経路セグメントの使用を要求する予約要求を受信する段階を含む。本方法はさらに、前記第一の経路セグメント上に第二の移動駆動ユニットが現在位置されていることを判定する段階と、前記第二の移動駆動ユニットが前記第一の方向に動いているかどうかを判定する段階とを含む。さらに、本方法は、前記第二の移動駆動ユニットが前記第一の方向に動いているのではないと判定するのに応答して、前記予約要求が拒否されることを示す予約応答を送信する段階を含む。本方法はまた、前記第二の移動駆動ユニットが前記第一の方向に動いていると判定するのに応答して、前記予約要求が承認されることを示す予約応答を送信する段階を含む。
 (もっと読む)
(もっと読む)
目録品を移送するシステムおよび方法
目録品を移送する方法が、移動駆動ユニットを作業スペース内の第一の点に移動させることを含む。第一の点は、目録品ホルダーの位置である。本方法はさらに、前記移動駆動ユニットを目録品ホルダーとドッキングさせ、前記移動駆動ユニットおよび前記目録品ホルダーを前記作業スペース内の第二の点に移動させることを含む。第二の点は、搬送設備に関連付けられている。本方法はさらに、前記目録品ホルダーを前記作業スペース内の第三の点に、前記搬送設備を使って移動させることを含む。
 (もっと読む)
(もっと読む)
移動駆動ユニットのための経路を生成するシステムおよび方法
目録品を移送する方法が、ルート要求を移動駆動ユニットから受信する。ルート要求は、作業スペース内のある行き先位置を指定している。作業スペースは、第一のセル属性に関連付けられた少なくとも一つのセルおよび前記第一のセル属性に関連付けられていない少なくとも一つのセルを含む。本方法は、移動駆動ユニットの状態を判定する段階を含む。本方法はまた、前記移動駆動ユニットが第一の状態に関連付けられていると判定するのに応答して、前記移動駆動ユニットのための、前記第一のセル属性に関連付けられたセルを通る、前記行き先位置への経路を生成することを含む。本方法は、前記移動駆動ユニットが前記第一の状態に関連付けられていないと判定するのに応答して、前記移動駆動ユニットのための、前記第一のセル属性に関連付けられたセルを通らない、前記行き先位置への経路を生成する段階を含む。本方法はさらに、前記経路を前記移動駆動ユニットに送信する段階を含む。
 (もっと読む)
(もっと読む)
スイッチ装置およびこのスイッチ装置を具備した移動棚設備
【課題】離間位置から棒状部材を用いて正確かつ容易に操作できるスイッチ装置を提供する。
【解決手段】荷役車両の乗車位置から操作ロッド21を使用して操作可能なスイッチ装置11で、スイッチ釦14の外周部に、前方外周側に広がるガイドプレート15を設け、ガイドプレート15の内面15aにより操作ロッド21の先端部21aをスイッチ釦14に案内して操作可能に構成した。
(もっと読む)
搬送台車の障害物検出装置
【課題】天井走行式搬送台車を用いる搬送システムにおいて、的確に障害物を検出することにより安全性を確保することができる搬送台車の障害物検出装置を提供する。
【解決手段】 搬送台車の障害物検出装置1では、測距ビームスキャン検出装置2により測距ビームを予め登録した距離・角度でスキャンさせることにより形成される仮想平面で定義される監視領域内において障害物を検出する。測距ビームスキャン検出装置2が障害物を検出した場合は、障害物報知装置3で警告灯3aを点灯し、警告音出力装置3bで警報を鳴らす。又は、台車制御装置4で無線又は有線の通信手段4aを介して搬送台車10を減速・停止さる。尚、測距ビームスキャン検出装置2は、障害物を検出した場合に光の放射を停止する安全対策機能が付加されている。
(もっと読む)
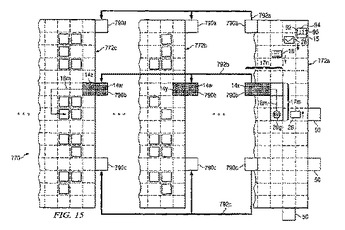
パレットレス商品パッケージを収納棚に配置する、およびそこから送出するための、およびパッケージのロジスティックスを制御するための方法
パレットレスの、およびサイズに関して可変のパッケージ(1)を倉庫ラック(15)に積み重ねるおよび該パッケージ(1)を前記ラックから取り戻す方法、およびパッケージのロジスティックスを制御する方法であって、前記方法では、前記倉庫ラックは、自動パッケージ積み重ねおよび取り戻しロボットを備え、且つ前記方法では、倉庫データおよびロジスティックスの制御が、データシステムによって起こる。前記方法に含まれる装置(5)は、パッケージ(1)を、例えばコンベアベルト(2)上へ受け入れ、装置(5)は、パッケージ(1)の計量、パッケージ(1)の必要なスペース要求の決定、前の機能に基づいてパッケージ(1)のために決定されたラックスペースを選択するために、例えばRFIDコード(20)のような、パッケージ(1)に連結されたリモートコードの読み取りを行い、パッケージ(1)を、使用者の命令かデータシステムの命令のいずれかによって操縦されるラックから取り戻し、上述の積み重ねおよび取り戻し機能からのデータをデータシステムに送信する。 (もっと読む)
1 - 20 / 26
[ Back to top ]