
Fターム[3F044BA05]の内容
Fターム[3F044BA05]の下位に属するFターム
Fターム[3F044BA05]に分類される特許
1 - 10 / 10
搬送装置および組立装置
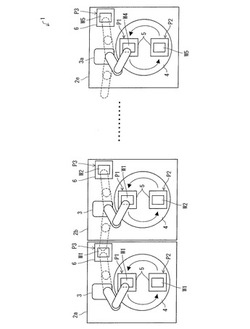
【課題】作業工程フローの変更や作業工程の増減、ワークの外形寸法の変更などの標準化されてない作業工程に対して、柔軟に対応でき、かつ、生産性(スループット)を向上できるとともに、設備の設置面積が大きくなるのを抑制できる搬送装置を実現する。
【解決手段】搬送装置1には、ワーク台6とスカラロボット3とロータリーインデックス4とを備えた搬送ユニット2a・2b・・2eが複数個備えられ、隣接する二つの搬送ユニット2a・2b中、搬送ユニット2aのワーク台6上のワークW1は、搬送ユニット2bのスカラロボット3によって、搬送ユニット2bのロータリーインデックス4上の第1の位置P1に移載され、ロータリーインデックス4上に移載されたワークW1は、第1の位置P1および/または第2の位置P2で所定工程が施され、上記所定工程が施されたワークW2を第1の位置P1から搬送ユニット2bに備えられたワーク台6上に移載する。
(もっと読む)
貨車

【課題】滑り軸受でターンテーブルの上下方向の荷重を受ける場合であっても、ターンテーブルを回転させる駆動装置の大型化を抑制することができる貨車を提供すること。
【解決手段】積載物の重量が所定値以下の場合は、支持台22に配設される軸収容部32の底面および回転軸31の下面31aの対向面間に配設され回転軸31を支える第1滑り軸受33のみでターンテーブル10の上下方向の荷重を受け、積載物の重量が所定値を超える場合には、支持台22の上面に配設されると共に回転軸31を中心とする仮想円D上に位置する複数の第2滑り軸受34が、ターンテーブル10の下面に配設されると共に積載物が積載されない状態で第2滑り軸受34との間に所定の隙間が設定される当接部35と接触して、第1滑り軸受33及び第2滑り軸受34でターンテーブル10の上下方向の荷重を受けるように構成されている。
(もっと読む)
容器用の充填及び密閉装置
本発明は、容器(6)用の充填及び密閉装置に関し、第1のロボットアーム(11)を備える第1の処理ステーション(1)、第2のロボットアーム(21)を備える第2の処理ステーション(2)、及び定位置の第1のプロセスステーション(4)を含んでおり、第1のロボットアーム(11)は、容器(6)を定位置の第1のプロセスステーション(4)へ搬送するようになっており、第2のロボットアーム(21)は、容器(6)を第1のプロセスステーション(4)から後続の1つのステーション(7)へ搬送するようになっており、定位置の第1のプロセスステーション(4)において少なくとも1つのプロセス工程を実施するようになっている。 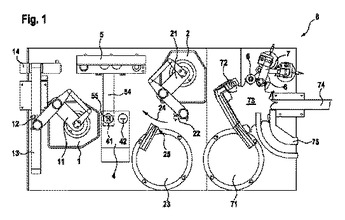 (もっと読む)
(もっと読む)
自動旋回機能を備えた搬送装置
【課題】旋回専用のアクチュエータを用いることなく、簡単な構成で搬送台車の搬送駆動力の一部を利用して搬送台車の搬送途中での予め定めた位置、また予め定めた角度に自動的に旋回するようにした自動旋回機能を備えた搬送装置を提供すること。
【解決手段】走行路に沿って走行するようにした走行台車2と、この走行台車2上に旋回可能に配設した旋回置台1とにより搬送台車Vを構成するとともに、旋回置台1を走行路に沿って配設した旋回用ガイドレール8にて旋回させるように構成する。
(もっと読む)
食製品のアラインメント
本発明は、食製品のアラインメント方法に関する。当該方法において、供給方向において搬入コンベヤに到達した食製品は、アラインメントステーションに達し、そこで製品がアラインメントされる。当該アラインメントされた製品は、当該アラインメントステーションから搬出コンベヤへ達する。アラインメントにおいて、目標とするアラインメントに対する製品のミスアラインメントが検出され、当該製品がそのミスアラインメントに基づいてアラインメントされる。当該製品は、製品支持部に支持されている製品によってアラインメントされ、当該製品支持部は、アラインメント動作を実行するように駆動され、当該製品のアラインメントは、当該製品と当該製品支持部との間の相対的な移動なしに達成される。本発明は、さらに食製品のアラインメントデバイスに関する。 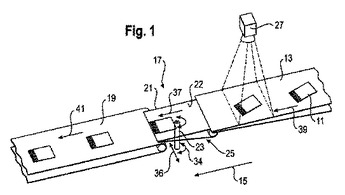 (もっと読む)
(もっと読む)
直角搬送可能な搬送装置
【課題】従来の固定移載機及び固定移載置台を省いて装置を簡略化し、移載用固定置台と2台の搬送台車間にて搬送物を受け渡しを行って直角搬送するようにした直角搬送可能な搬送装置を提供すること。
【解決手段】それぞれ搬送台車1,2を走行可能に配設する2つの搬送路を直角に配設し、搬送路の直角に交わる位置に、一方の搬送台車1から他方の搬送台車2へ搬送物を受け渡して移載を行うための移載用固定置台Bを配設する。
(もっと読む)
被搬送物の搬送装置及び被搬送物の取外し方法
【課題】引張ばねの付勢力を利用しなくてもハンガーと被搬送物に設けた吊金具との係合状態を確実に解除可能とする。
【解決手段】搬送チェーンに搬送体及び吊持体を介して吊設される支持杆9aと、前記支持杆9aに基端部を回動自在に枢支した一対の吊持杆9bと、前記一対の吊持杆9bの先端部に設けられて被搬送物の内周面に設けた吊金具と係合する縦長な環状の掛止具9cと、前記掛止具9cにおける一方の長辺部の一部を切除することにより形成され、掛止具9cの内側と外側とを連通する連通部9dと、前記各掛止具9cの連通部9dから、該掛止具と直交する状態で互いに相対する方向へ向けて延設した窓状の膨出部9eとを備えて被搬送物掛止用のハンガー9を構成した。
(もっと読む)
ローダー・アンローダー装置
【課題】処理能力の高いローダー・アンローダー装置を提供する。
【解決手段】ローダー・アンローダー装置2のローダーユニット2aは、ワーク100を装着する所定の高さの装着部位202に対して近接されるアプローチ区間と装着部位202から離れる離間区間とを有する軌道を備える環状カム40と、ワーク100を保持可能なテーブル26を有し、回転可能でかつ環状カム40に軌道制御されてテーブル26を装着部位202に対して昇降可能に保持するワーク供給部材20aを備えている。このため、ワーク100を連続的にかつ効率よく装着部位202に供給できる。
(もっと読む)
帯状部材の搬送切断方法および装置
【課題】 省スペース化を図りながら、帯状部材12の切断角度Sの変更時における作業能率を向上させる。
【解決手段】 切断手段15による帯状部材12の切断角度Sが変更されると、変更された切断角度Sに応じて第3コンベア36によるシート片16の旋回角度を変更し、第2コンベア17にシート片16が常に所望の姿勢で搬送されるようにする。このように第3コンベア36によるシート片16の旋回角度を変更するだけで対処することができ、この結果、第2コンベア17を揺動させるための広い設置スペースが不要となって、省スペース化を図ることができるとともに、容易に作業能率を向上させることもできる。
(もっと読む)
被搬送物の搬送装置及び被搬送物の取外し方法
【課題】ハンガーからの被搬送物の取外し作業を、人手を要することなく自動化して行うこと。
【解決手段】ハンガーに掛止した被搬送物が所定位置まで搬送されたことを検出する第1の検出手段と、前記所定位置において被搬送物を載置し、かつ、前記被搬送物を昇降及び回動させることでハンガーとの掛止状態を解除するテーブルリフタと、前記テーブルリフタに配設され、ハンガーに掛止されている被搬送物の底部を検出することでテーブルリフタの上昇位置を検出する第2の検出手段と、前記第1,第2の検出手段から出力される検出信号に対応してテーブルリフタを駆動制御する制御装置からなる取外し装置を具備して搬送装置を構成したことを特徴とする。
(もっと読む)
1 - 10 / 10
[ Back to top ]