
Fターム[3F079CC03]の内容
物品の選別 (7,206) | 選別(分配、それに伴う処理) (838) | 分配機構 (658) | 吹き飛ばしによるもの(例;エヤー) (176)
Fターム[3F079CC03]に分類される特許
161 - 176 / 176
粒状物色彩選別機

【課題】空気流入口18のそれぞれに対応した空気噴出ノズル16の特定水平方向f2の配置間隔を従来よりも小さくすることを可能となし、また空気噴出ノズル16からの空気噴射時点の正確性を向上させる。
【解決手段】多数の動力止弁15と、特定落下位置の異色粒状物w1を特定領域へ吹き飛ばす空気流を生じさせるための多数の空気噴射ノズル16を水平特定方向f2の直線状配置に形成され且つ該空気噴射ノズル16のそれぞれがそれぞれ別の空気流入口18に連通されているノズル集合体17と、動力止弁15のそれぞれをそれぞれ別の空気流入口18に連通させた多数の通気管19とを備えた粒状物色彩選別機において、隣接した2つの空気流入口18、18同士を側面視で上下方向及び又は前後方向へずれるように配置すると共に、通気管19のそれぞれの長さを略同一となす。
(もっと読む)
方向選別装置および方向選別方法

【課題】 高速で誤選別がなく、チップ状電子部品の上下面および前後方向を揃えることが可能な方向選別装置および方向選別方法を得る。
【解決手段】リニアフィーダ12は搬送面12aと側壁12bとを有し、チップ状電子部品1を所定方向に一列に整列搬送する。リニアフィーダ12の搬送面12aの途中には、段部12cが設けられている。マーク検出用センサ23は段部12cの直前の搬送面12a上方に配置され、チップ状電子部品1の上面に設けられた方向識別マーク2を検出する。空気噴出手段26は、圧縮空気源と、ソレノイドバルブ27と、ソレノイドバルブ27を介して圧縮空気源に連通した空気管24とで構成されている。空気管24の先端部は、リニアフィーダ12の段部12c直前の側壁12bに設けた空気噴出孔25に連結している。前端位置検出用センサ22は、互いに別体の光源部22aおよび受光部22bからなる透過型センサである。
(もっと読む)
ガラス製造バッチを分析及び最適化するシステムとその方法
【解決手段】 本発明の特定の好ましい実施形態において、ボトル製造の前に、カレットの流れを分析及び洗浄するシステム及び方法が提供される。本発明の特定の観点によると、前記システムは、原料供給機、混合段階、溶融段階、ボトル形成段階、冷却/焼鈍段階、検査段階、及びバッチ制御装置が含まれる。前記原料供給機は、更に、内部にカレット供給物を含むカレットビン、供給機、分析装置、及び除去組立品を含む。本発明の特定の好ましい実施形態は、カレットをコンベヤーに送り込む工程、前記カレットの組成のリアルタイム分析を行う工程、前記カレットから汚染物質を除去する工程、前記カレットバッチが既定の許容閾値と一致しているかどうかを決定する工程、前記ガラスバッチ処方を調整する工程、前記バッチ成分を混合段階に送出する工程、更にその後全体のガラス製造工程を完結させる工程を含むものである。 (もっと読む)
概して平坦かつ軽量の物品のガス駆動される流れを選別するための方法及び装置
様々な寸法の概して平坦で軽量の物品のガス駆動される流れを選別するための方法及び装置は、好適な光学的な検査を行い、これにより不適格の物品を発見し、この不適格の物品を流れから除去する。特に、検査及び選別は物品の実質的に直線的な移動の間に行われる。除去は、直線的な移動に対して実質的に垂直な方向にガスを駆動することによって行われる。有利には、検査の前に、遠心力によって物品を向き付け、この遠心力は、前記物品を、垂直運動への移行部における傾斜した壁部に対して向き付ける。物品を狭い層に閉じ込めるために空気流手段(83,84)が使用されることもできる。 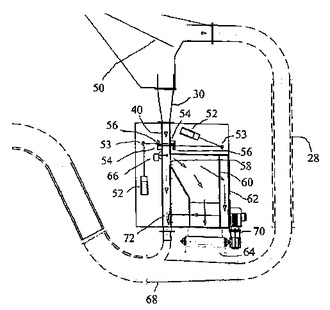 (もっと読む)
(もっと読む)
選別・検査装置用シュート
【課題】多数の生産品の流れを検査ステーションに届ける装置において、塊になるリスクを低減し、それによって大量で流速が速くても検査効率が維持されるようにする。
【解決手段】検査・選別装置用シュートは、二つの部分、即ち第一の上部6と溝付き下部2とを有している。第一部分6は、上に乗っている個々の生産品が横方向にも下方向にも移動できるようにする滑らかな、通常磨かれた表面を有している。下部2では、個々の生産品は、それらの横方向の動きが溝によって制約されており、本装置の検査ゾーン22に排出される前に溝に沿って整列した状態になって行く。本装置が選別用の場合、検査ゾーン22からの信号に応答して作動するエゼクター26が組み込まれており、生産品の流れから選択された個々の生産品を排除する。それら選択された個々の生産品は、排斥容器28内に逸らされ、他方残りは収集容器24内へと進んで行く。
(もっと読む)
色彩選別機
【課題】外力付与手段11が異色粒状物w1に外力を付与する時点の正確性を向上させる。
【解決手段】流下案内面2aの下端から落下される粒状物wを撮像するエリアセンサー14を具備した速度特定手段10を設ける。
或いは、少なくとも1つのセンサーによる粒状物撮像位置が他のセンサーの粒状物撮像位置に対し粒状物の落下方向へずれた状態となるように2つ以上のセンサーを配設し、前者粒状物撮像位置における撮像情報と、後者粒状物撮像位置における撮像情報とから異色粒状物w1の落下速度の大きさを特定する速度特定手段10を設ける。
(もっと読む)
フィーダー及び色彩選別機
【課題】ホッパー9から流下樋2への粒状物wの供給において粒状物wがその流動通路から外方へこぼれ落ちるのを阻止してホッパー9から選別手段3まで粒状物wを安定的に供給する。
【解決手段】動力により振動されるトラフ10の底部10a上面から特定距離離れた高さ位置にホッパー9の出口通路9aの下端を位置され、前記ホッパー9内の粒状物wが前記出口通路9aから前記トラフ10上に落下して前記トラフ10の振動による搬送力を付与され漸次に前記トラフ10の送出部10bへ送り移動されるようになされたフィーダー1において、前記出口通路9aの開度を前記送出部10bから送出される粒状物wの流量、前記振動の振幅の大きさ、又は、前記振動の周波数などで代表される前記トラフ10の搬送力に関連して自動的に制御するものとした開度調整手段23を設ける。
(もっと読む)
ばら状態で流れる生産物の品質評価方法
ばら状態の生産物の流れにおける該生産物の品質に関連したデータを、その監視ステーション通過中に発生する方法が開示されている。監視ステーションにおける生産物の少なくとも一部分の検査は、その流れが流れている間に間隔をおいて実施される。その検査は、一つ以上の色々な技術を使用して検査されるその部分における個々の生産物片を識別する。それら個々の生産物片は次いで選定基準に従って検査され、それら基準に合わないような個々の生産物片の量又は割合が確定される。そのような検査によって発生されるデータは、ばら状態の流れの品質表示を行うために分析される。  (もっと読む)
(もっと読む)
粉粒体選別装置
【課題】 簡単な構成で、粉粒体を容易に一様な薄い層状にして移動させることができ、異物選別処理能力の向上を可能とした粉粒体選別装置を提供する。
【解決手段】 粉粒体選別装置1Aは、粉粒体を供給部11から回転する円形部材12上に供給し、遠心力により一様な薄い層状にし、光センサー部15により粉粒体中の異物の有無を検出し、異物が検出された場合には、吸引ダクト26を備えた内方回収部14により異物を含む粉粒体を吸引して排除し、その他の場合には、粉粒体を遠心力により円形部材12の外側に放出し、外方回収部13に導いて異物とこれを除く粉粒体とを選別するように形成されている。
(もっと読む)
振り分け装置
【課題】 高速で処理する選別機の振り分け装置において、物品に傷を付けることなく、また変形や破袋を生じさせることなく振り分け確度の高い振り分け装置を提供すること。【解決手段】 連続する複数の搬送コンベアの途中に物品を振り分ける搬送通路を設け、該搬送通路に到来する物品を搬送通路の手前で検出する物品検出装置と、上記搬送通路には片方がヒンジの開閉フリッパと、該開閉フリッパの上部には圧縮エヤーを下方に向けて吹き付けるエヤーノズルとを備え、搬送されてくる物品が良品の場合は、上記開閉フリッパが「閉」の状態となり、上記物品は搬送通路上を通過して後段の搬送コンベアに向かう、また搬送されてくる物品が不良品の場合は、上記開閉フリッパが「開」の状態となり、所定のタイミングでエヤーノズルより圧縮エヤーを吹き付け上記不良品を搬送通路の下方に振り分ける。 (もっと読む)
金属検出装置及び金属除去装置
【目的】 メンテナンスの手間を増加させずに、金属検出センサの感度を高感度に維持しつつ、互いの干渉を抑制し、カレットに混在する鉛等の金属を効率よく検出する。
【解決手段】 検出用コイル51を所定周波数で発振させて検出用磁界を発生し、検出磁界内を通過したカレットに混在する金属を検出する金属検出装置において、検出用コイル51を所定方向に沿って複数配列し、複数の検出用コイル51の検出磁界が所定方向に沿って略連続するようにし、各検出用コイル51を時分割方式で順次動作させる。
(もっと読む)
材料回収施設においてリサイクル用品を分別し、関連するデータを収集し、および保証するためのシステムおよび方法
リサイクル可能な材料を含む入力ストリーム中のガラス、プラスチックおよび/または紙の組成に関連するデータを収集するためのシステムおよび方法。収集されるデータは、例えば、入力ストリーム中のガラス、プラスチックおよび/または紙の重量および/または体積に関連することができる。このデータは第三者の使用のために保証されることができる。 (もっと読む)
ペレット選別機
【課題】 透明度の高い樹脂ペレットであってもペレット内部での乱反射を抑えて、正常ペレットと不良ペレットとの誤判別をなくし、精度よく選別・除去することができるペレット選別機を提供する。
【解決手段】 ペレット選別機(1)の第1バックグラウンド(19A)及び第2バックグラウンド(19B)のそれぞれを、放物線軌跡(L)に接近させるとともに、該放物線軌跡Lの流下方向に沿って凸状又は凹状に湾曲させて形成する。
(もっと読む)
2次元配列ノズルを備えた分離装置及び選別装置並びに物体の選別方法
選別装置(10)は、装置に投入された投入物体(13)を搬送するための搬送手段(12)と、特定の物体クラスに属すると識別された投入物体を搬送手段から取出すための取出し手段(17,18,20,21)と、前記識別された投入物体の搬送手段を横切る位置に少なくとも対応する入力データを受け、且つ、前記識別された投入物体の取出しを行うために、入力データに対応する制御信号を取出し手段に出力するように構成された処理手段(16)と、を含み、取出し手段は、搬送手段を横切るz方向に延びるノズル配列を含み、ノズルの各々は、概ね上向きのy方向にエアジェットを生じさせるため、処理手段の制御の下に独立に作動可能であり、取出し手段は、前記制御信号に応答して、前記制御信号に対応するノズルの副群を動作するように構成され、搬送手段は、ノズルの配列上で投入物体を搬送するように構成された部分開口面を有し、ノズルの配列は、2次元であり、且つ、装置が使用中である時の搬送手段の移動方向と実質的に平行なx方向に延び、入力データは、前記識別された投入物体の外形形状にさらに対応する、ことを特徴とする。 (もっと読む)
留め具(ファスナー)の点検装置
大量のファスナーをいろいろな幾何学的観点から100%点検し選別出来る高速ファスナー点検装置が提供される。この装置は外円周と内円周を持ち、外円周から内円周に光線状に伸びた沢山の溝を持つ回転盤30を含む。ファスナーが溝の中で頭を上にし、足を溝に入れている時、妨げのない側面像を捉える事が出来る。積み込み機構40、ジャミング防止機構50、選別機構100、は回転盤30の外円周に沿って位置している。ファスナーが溝に入っている時にそのイメージを捉え映像点検するカメラ60,70が最低一台は備えられる。イメージ分析器が映像点検カメラに作動連結されており、ファスナーが欠陥品であるかどうかを決定する。イメージ分析器が欠陥のあるファスナーを見つけると、選別機構100が働き、回転盤30からその欠陥ファスナーを取り除く。 (もっと読む)
分類装置及び方法
粒子状の製品の流れ(25)が濃縮器(26)を通過し、環状で垂直に向く製品の流れ(32)を作る内側(30)および外側(31)の製品ガイドを備えるコリメータに、製品を環状の一層の状態で均等に分配する、コニカル状の分配プレート(27)上に製品を供給する分類装置を提供する。製品の流れ(32)の環の中に位置して、回転のためモータ(35)によって駆動されて環状検知領域(36)内の製品を走査するビームスプリッティングミラー(34)をその下に搭載する、検知器および光学ボックス(33)を配置する。検知領域(36)を通過する製品は、ソースと衝突し、反射または透過強度信号(37)が検知器および光学ボックス(33)内の検知器によって測定される。分類された製品は、生産物の流れから、検知器および光学ボックス(33)の検知器によって制御される制御手段に応じて駆動可能なリジェクタ(40)の対応する1つによって除去される。分類された製品(41)は、シュート(42)に入り、分離プレート(43)の一方のサイドに到達する。残りの製品は妨害されていない状態でシュート(44)内に続く。 (もっと読む)
161 - 176 / 176
[ Back to top ]