
Fターム[3F321EA08]の内容
エスカレータ、移動歩道 (7,787) | 検出対象 (710) | 運転状態 (125) | 運転速度 (49)
Fターム[3F321EA08]に分類される特許
1 - 20 / 49
乗客コンベアの利用人数計測装置、乗客コンベアの利用人数計測方法及び乗客コンベアの運転方法
【課題】乗客コンベアの利用人数を精度良く計測する。
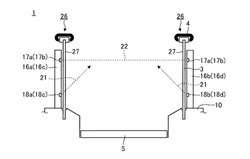
【解決手段】実施形態のエスカレータ1(乗客コンベア)は、一方の乗降口である下階側乗降口29の踏段5の移動領域に設置され、1つの踏段5に乗っている乗客の通過を検知する透過型センサ17aと、1つの踏段5を透過型センサ17aと同時に検知範囲となるよう、踏段5の幅方向の左右外側にそれぞれ設置され、踏段5上の幅方向中央よりそれぞれが設置される側の領域に乗っている乗客の通過を検知するよう検知範囲が設定される左側反射型センサ18a及び右側反射型センサ18bと、センサ17a,18a,18bの検知結果に基づき、1つの踏段5に乗っている乗客の人数を判定し、下階側乗降口29におけるエスカレータ1の利用人数を算出する制御装置12と、を備える。
(もっと読む)
乗客コンベアの制御装置

【課題】乗客の種類を判別して運転速度を自動的に切換えることによって、安全性を確保した上で運転効率を上げる乗客コンベアの制御装置を提供する。
【解決手段】乗客1a、1bの身長と乗り込み速度を第1の乗客センサー3a(3b)と第2の乗客センサー3c(3d)で検出することにより、乗客1a、1bが子供や老人等の弱者か健全者か、あるいは健全者でも乗り込み速度が速いかどうかを判別し、判別した乗客1a、1bの種類によって、乗客コンベアの運転速度を自動的に定常速度より遅い低速、定常速度、定常速度より速い高速の3段階に切換える。
(もっと読む)
エスカレーター制御装置およびエスカレーター群制御装置
【課題】省エネ性と利便性の優先度を考慮して、エスカレーターの定量的な省エネ計画を設定し、実現し易いエスカレーターの省エネ制御装置を提供する。
【解決手段】一日の各時間帯毎に、乗客負荷の上限値、運転速度、および稼動/停止を自由にスケジューリングし、設定された乗客負荷の上限値の範囲内で、設定された運転速度で、並びに稼動可能時間帯内でエスカレーターが運転制御されるようにした。乗客負荷が、その時間帯に設定された上限値を超えると、アナウンス装置71と表示装置72により、特定乗客以外の乗客のエスカレーターへの乗り込みを禁止する。エスカレーターの運転速度は、スケジューリングされた通りにインバータ8によって速度制御され、不稼動時間帯になるとエスカレーターは自動的に停止させる。
(もっと読む)
乗客コンベア
【課題】ブレーキの制動に必要な性能を確保しつつ、ブレーキ回路の部品の摩耗を減少させることができる乗客コンベアを提供することを目的とする。
【解決手段】異常検出部44が検出した異常が、緊急度の高い異常であると判断したときは、非常停止指令部48を動作させ、ブレーキ18を緊急停止させ、異常が緊急度が低い異常であると判断したときは、減速停止指令部50を動作させ、ブレーキ18を通常動作で動作させる停止選択部46を有する。
(もっと読む)
乗客コンベアのオイルパン清掃制御装置、乗客コンベアのオイルパン清掃方法
【課題】オイルパイン上の清掃において、最適な作業時間による清掃を実現し、作業時間の省力化と清掃品質の向上を図ること。
【解決手段】ステップ1を予め定められた所定の速度で走行させるように制御し、清掃板31が乗降口の近傍に到達したことが検知された場合に、ステップ1の走行方向を逆転させるようにステップ1の走行を制御し、ステップ1の走行速度の検知結果に基づき、ステップ1の走行速度が予め定められた所定の速度となるようにステップ1の環状走行のトルクを指定するトルク指定値を出力し、清掃板31がオイルパン2を清掃する方向に走行している際に出力されるトルク指定値と所定のしきい値との比較結果に基づいてステップ1の走行を停止させることを特徴とする。
(もっと読む)
乗客コンベア
【課題】待機モードにおける削減された消費電力量を容易に管理者が把握できる乗客コンベアを提供する。
【解決手段】エスカレータ1における階高、定格速度、待機速度を含むパラメータに基づいて、待機モードにおける削減消費電力を演算し、削減消費電力と待機時間から削減消費電力量を演算し、削減消費電力量を表示する。
(もっと読む)
マンコンベアの表示装置
【課題】エスカレーターや移動通路等のマンコンベアの運転速度、運転方向に合わせて表示装置の表示速度と方向を自動制御するマンコンベアの表示装置を得る。
【解決手段】マンコンベア1に設けられた踏段2の移動方向に沿って設置された表示装置3と、踏段2の移動速度に同期して回転する歯車板6と、歯車板6の回転速度を検出する検出センサ7、8と、検出センサ7、8の検出信号によりマンコンベア1の運転速度を算出すると共に、検出センサ7、8の検出信号によりマンコンベア1の運転方向を検知し、更に、マンコンベア1の運転速度、運転方向に合わせて表示装置3の表示速度と方向を制御する表示器制御装置を備えた。
(もっと読む)
乗客コンベア
【課題】駆動モータに無段変速機を取り付けた場合に、無段変速機の制動を確実に行うことができる乗客コンベアを提供する。
【解決手段】無段変速機16が所定回転速度以上に加速したことを検出する速度検出部56を有し、速度検出部56がこの加速を検出したときに、ブレーキ装置34は、駆動大スプロケット24と同軸に取り付けられた制動輪36にブレーキシュー40を制動輪36に押し当てる。
(もっと読む)
乗客コンベアのハンドレール駆動力診断装置及びハンドレール駆動力診断方法
【課題】ハンドレール駆動力の異常の有無を容易かつ迅速に診断することができる乗客コンベアのハンドレール駆動力診断装置及びハンドレール駆動力診断方法の提供。
【解決手段】診断を開始する診断開始指令手段15と、ハンドレール速度を計測するハンドレール速度計測手段17と、駆動モータ1のトルクを計測する駆動モータトルク計測手段18と、ハンドレール8に負荷を加えるハンドレール負荷手段14と、計測指令を出すと共に、負荷が加えられた状態及び無負荷状態におけるハンドレール速度及び駆動モータ1のトルクから偏差を算出する偏差算出手段と、ハンドレール速度の偏差が所定値以上、且つ駆動モータ1のトルクの偏差が所定値以上のとき、ハンドレール駆動力が正常であり、ハンドレール速度の偏差が所定値以上、且つ駆動モータ1のトルクの偏差が所定値未満のとき、ハンドレール駆動力が異常であると判定する診断制御手段19とを備えた。
(もっと読む)
乗客コンベアの制御装置
【課題】安全装置による非常停止時に乗客の負荷の軽重に拘わらず、踏段上の乗客の体勢を安定に保つことができる乗客コンベアの制御装置の提供。
【解決手段】本発明は、エスカレータの安全装置の動作を検出する安全装置動作検出手段13と、踏板1の速度と運転方向を検出する踏板速度検出装置4と、ハンドレール2の速度と運転方向を検出するハンドレール速度検出装置6と、安全装置の動作による非常停止時にエスカレータの運転方向に応じて踏板1とハンドレール2を所定の停止距離で停止させる制御を行なう停止距離制御手段12を備えている。本発明は、停止距離制御手段12の制御により、エスカレータの上昇運転時には、踏板1の停止位置に対してハンドレール2を所定距離進ませて停止させ、エスカレータの下降運転時には、ハンドレール2の停止位置に対して踏板1を所定距離進ませて停止させるようにしてある。
(もっと読む)
マンコンベア
【課題】案内情報を切り替え可能な表示部を用意し、踏段に乗車する乗客に適した案内情報を表示可能なマンコンベアを得る。
【解決手段】踏段11と、乗り口15の床15aの一部を構成するように設けられ、案内情報を表示する表示面31aを有する表示部31と、複数の異なる案内情報を記憶する案内情報記憶部39aと、表示面31aから踏段11と反対側に離間する所定領域を撮影領域とする撮像手段20と、撮像手段20の出力から上記撮影領域の画像データを得る画像処理部34と、画像データから、撮影領域に入り込んだ乗客を含む移動体の特徴点を抽出し、移動体の特徴点に基づいて、案内情報を選択する画像判断部と、画像判断部が選択した案内情報を表示面31aに表示させる表示制御部と、を備える。
(もっと読む)
ハンドレール先行量測定機
【課題】運搬時の小型化を実現でき、また、測定時の十分な安定性を確保できるハンドレール先行量測定機の提供。
【解決手段】ハンドレール3a,3b及び踏段2を有するエスカレータに設置され、ハンドレール3a,3bの移動距離と踏段2aの移動距離との差をハンドレール3a,3bの先行量として測定するハンドレール先行量測定機において、ハンドレール3a,3bの先行量Lの測定時に、ハンドレール3a,3bに接触するように伸長可能に設けられ、非測定時に収縮可能に設けられる測定棒5dと、この測定棒5dを踏段2aに固定する固定手段とを備えている。この固定手段は、測定棒5dを保持し、踏段2aに載置される土台5bと、この土台5bの下部に設けられ、踏段2aの溝2a1に嵌入可能なゴム体5aとから成っている。
(もっと読む)
エスカレータ
【課題】乗客をのせて上昇運転する踏段が緊急停止するときに、乗客への体力的な負担を軽減することのできるエスカレータを得る。
【解決手段】踏段と、踏段を駆動する電動機と、移動手摺20と、移動手摺20を加圧挟持する駆動ローラ62及び加圧ローラ63を有し、移動手摺20を踏段16に同期させて移動させる手摺駆動装置50と、を備えるエスカレータにおいて、手摺駆動装置50は、手摺押圧機構70A,70B、及び手摺押圧機構70A,70Bを制御する手摺駆動制御手段27と、を備え、手摺駆動制御手段27は、踏段の緊急停止信号を検出し、踏段に荷重がかけられていると判断すると、移動手摺20への駆動力の伝達を解除するとともに、移動手摺20の減速度を、踏段の減速度より小さい所定の範囲内に保つように手摺押圧機構70A,70Bを制御する。
(もっと読む)
乗客コンベアの制動方法およびその装置
【課題】乗客負荷を検出する負荷検出装置、および制動力を変化させ得る制動機を必要とすることなく、乗客負荷によらず一定の減速度を保つ乗客コンベアの制動方法およびその装置を得る。
【解決手段】無端状に形成された踏段チェーンに多数の踏段が取付けられて無限軌道を形成する乗客コンベアを制動する乗客コンベアの制動方法であって、前記踏段の目標減速度の速度線に対して上部にずらした上部制限速度と、前記目標減速度の速度線に対して下部にずらした下部制限速度を設定し、前記踏段の移動速度が前記下限制限速度を下回る場合には制動を行なわず、前記上部制限速度を上回る場合には制動を行なう。
(もっと読む)
手摺駆動制御装置
【課題】踏板速度と手摺速度が同期していない状態を確実に検出し、速度偏差に応じて速度補正処理、停止処理を適切に行うことのできる手摺駆動制御装置を得る。
【解決手段】踏板駆動機5と手摺駆動機11が別々に設けられた乗客コンベアにおいて、踏板速度および手摺速度に基づいて、踏板駆動機および手摺駆動機の駆動制御を行う際に、踏板速度検出器は、踏板速度に応じたパルス信号として位相の異なる2つの踏板速度用パルス信号を出力し、手摺速度検出器は、手摺速度に応じたパルス信号として位相の異なる2つの手摺速度用パルス信号を出力し、それぞれのパルス信号に基づいて、速度検出結果が正常であると判断した場合には、手摺速度と踏板速度とを一致させるように補正後の速度指令値を求め、手摺駆動機を駆動制御する比較制御部30をさらに備える。
(もっと読む)
乗客コンベアの非常時制動装置
【課題】上昇運転時の主軸制動装置を安全に動作させる乗客コンベアの非常時制動装置の提供。
【解決手段】乗客コンベアの上部機械室内に位置し,踏段チェーン6が巻き掛けられる踏段駆動輪7の主軸4の回転により速度を検出する速度検出装置9と,踏段駆動輪7の主軸に固設した挟圧円板10と,円周方向に複数個所ばねを介して締結した環状の挟圧円板13にて挟み込んで庄接するとともに,環状の摩擦材14を両面に固設した環状の爪車15を有し,爪車15に係合,解除可能に揺動するよう保持されたレバーと,レバーを揺動させる電磁コイルとを有する乗客コンベアの非常時制動装置において,乗客コンベアの上昇運転時のレバーの揺動は,速度検出装置9が速度零または予め定めた微速度を検出したとき,電磁コイルの励磁或は消磁によるものとした。
(もっと読む)
乗客コンベア装置
【課題】上昇・下降運転のどちらの場合でも非常停止条件発生から所定の減速度でステップを所定の時間で停止させることができるとともに、非常停止時に生じる衝撃を軽減することのできる乗客コンベア装置の提供。
【解決手段】安全装置が動作したことを検出してステップ1及びハンドレール6を非常停止させるとき、乗客コンベアの上昇運転時には、ハンドレール1をステップ6より遅い減速度で停止させるとともに、乗客コンベアの下降運転時には、ハンドレール1をステップ6より早い減速度で停止させ、上昇・下降運転のどちらの場合でも非常停止時に乗客の身体を上方向に傾けることを促すとともに、上昇・下降運転のどちらの場合でも非常停止条件発生から最善と思われる所定の減速度でステップ1を所定の時間で停止させ、かつ、非常停止時にステップ1及びハンドレール6が同時に減速動作に入るようにしたものである。
(もっと読む)
コンベア安全制御
コンベアシステムは、コンピュータシステムに接続された複数のセンサを有する。コンピュータシステムは、センサの数以上の安全機能をチェックするようにプログラムされる。コンベアの安全機能を制御する方法は、コンベアに関連してコンピュータシステムに設けられた複数のセンサから信号を提供するステップと、学習モードでコンベアを作動させるステップと、学習モードでの作動中に、センサ出力信号と、可能なコンベアのタイプの物理的な幾何形状およびコンベアの許容される作動特性を示すコンピュータシステムに予め記憶されたロジックとの関係をコンピュータシステムで判断し、センサの安全性インテグリティを確立するようにセンサ出力間の関係を判断し、参照パターンとしてセンサ信号パターンを記憶するステップと、安全機能がモニタされる走行モードでコンベアを続けて作動させるステップと、センサ、コンピュータシステムおよびコンベアの作動の安全性インテグリティを確立するために、走行モードの間、コンピュータシステムにおいて、センサ信号のパターンと、参照パターンおよび予め記録されたロジックとを比較するステップと、を含む。  (もっと読む)
(もっと読む)
安全装置用パラメータの自動調節
コンベア(10、10a)の安全制御パラメータを自動的に調節する装置(100)および方法300)が開示される。安全装置(100)は、さまざまなセンサ(102、102a、104、104a、106、106a、108、108a)と安全制御モジュール(200、200a)とを備える。安全制御モジュール(200、200a)は、コンベア(10、10a)の作動および機械特性を学習し、予め規定された公称仕様に基づいてコンベア(10、10a)の作動特性を確認し、較正された安全制御パラメータを有する制御関数をコンベア作動の監視に使用するために決定するように構成された学習作業方法(300)で予めプログラムされ得る。 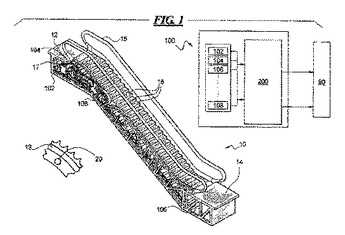 (もっと読む)
(もっと読む)
エスカレータ
【課題】運転指令の内容とステップの移動状態とに基づき、必要に応じてステップの移動を制動することができるエスカレータを提供することである。
【解決手段】エスカレータは、ステップチェーンと、ステップと、上部スプロケット軸上に固定された主駆動伝達スプロケットと、電動機と、電動機からの動力を減じて出力する軸に固定された原動機スプロケットを有する減速機と、主駆動伝達スプロケットと原動機スプロケットの間に設けられた主駆動伝達チェーンと、ステップの移動を制動する電磁ブレーキ部と、電磁ブレーキ部の軸に固定された制動用スプロケットと、上部スプロケット軸上に固定された自走防止用スプロケットと、制動用スプロケットと自走防止用スプロケットの間に設けられた自走防止チェーンと、運転指令の内容とステップの移動状態とに基づいて電磁ブレーキ部を制御する制御部とを備える。
(もっと読む)
1 - 20 / 49
[ Back to top ]