
Fターム[3F333BB01]の内容
フォークリフトと高所作業車 (11,384) | 回動運動の特徴 (398) | チルト(前後傾動) (237)
Fターム[3F333BB01]の下位に属するFターム
マストの起伏 (66)
ブームの起伏 (87)
架台、荷係合要素の起伏 (25)
作業台の水平維持装置 (46)
Fターム[3F333BB01]に分類される特許
1 - 13 / 13
リフター及び運搬車
【課題】移動が容易であり、かつ、作業場が傾斜しているなどの悪条件でも設置および作業が可能なリフターを提供する。
【解決手段】リフター1をマスト2、フォーク部3、およびハンガー4から構成し、フォーク部3はマスト2に沿って上昇及び下降し、ハンガー4はトラック100のアオリ102の上端に引っ掛けることができる。また、ハンガー4は、揺動自在になっており、これにより、マスト2は前後方向に揺動する。フォーク部3の爪は後端部を支点に立てた状態と寝かせた状態とに変化可能であり、フォーク部3を最下部まで下降させて爪部を立てた状態では、リフター1の重心は、マスト2の下側中央付近となる。そして、ハンガー4をアオリに引っ掛けたリフター1は揺動し、マスト2が略鉛直となった状態となる。ハンガー4は、揺動を抑えるハンガー固定部を有し、マスト2が鉛直の状態で固定することができる。
(もっと読む)
荷役車両

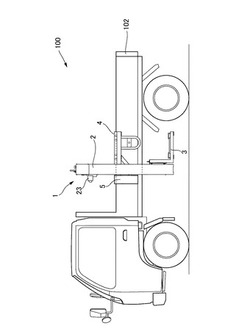
【課題】コンテナ等の荷室の天井等に接触することなく、最大限の高さの荷を、傾斜路を介して荷室にスムーズに搬入、搬出できる荷役車両を提供する。
【解決手段】前部に荷を底部から支持するフォーク14L,14Rを有する自走式の車体12と、車体12に設けられてフォーク14L,14Rを昇降駆動する車体部リフト装置13と、フォーク14L,14Rの前端側で従動輪52を介してフォーク14L,14Rを昇降駆動するフォーク部リフト装置51とを備え、フォーク14L,14Rの前後方向の傾斜角度を検出する水平検出センサ72と、水平検出センサ72により検出された傾斜角度に基づいて車体部リフト装置13によりフォーク14L,14Rを昇降駆動し、フォーク14L,14Rの姿勢を水平に制御するコントローラ71を設けることで、搬入出可能な最大限の高さの荷をコンテナ等の荷室に傾斜した傾斜路を介して搬入、搬出する。
(もっと読む)
荷物移送用ロボットと該ロボットの制御方法
【課題】棚の上などにおいた荷物を所定位置に好適に押すことのできる荷物移送用ロボットを提供する。
【解決手段】荷物移送用ロボット1であって、車輪2dを有するベース2と、ベース2に対して傾動可能に設けられるボディ3と、ボディ3をベース2に対して傾動させる傾動装置8と、ボディ3に対して動作可能に設けられるアームと、アームをボディ3に対して動作させる動作装置10,11と、制御装置12を有する。制御装置12は、傾動装置8を制御してボディ3をベース2に対して傾動させてボディ3の傾動方向の反対側にスペース18を形成し、かつスペース18を形成した時に動作装置10,11を制御してスペース18にアームの一部または全部を移動させる制御モードを有する。
(もっと読む)
荷降ろし用治具及びフォークリフト
【課題】荷物を容易に引き出すことが可能なフォークリフト及びフォークリフトに用いる荷降ろし用治具を提供する。
【解決手段】荷降ろし用治具1は、フォークリフト100の爪部101に取り付けられる基部2と、基部2に立設された腕部3と、腕部3の上端側に設けられ、前方に向かって突出する突出部4と、を有し、腕部3は、基部2に対して前後方向に回動自在に固定されている。
(もっと読む)
荷役車両
【課題】荷役ポンプ用電動機の過剰な運転を防止し、消費エネルギーを十分に節約することができる荷役車両を提供する。
【解決手段】フォークリフト1のコントローラ27は、リフトレバー操作角センサ30、ティルトレバー操作角センサ31及びアタッチメントレバー操作角センサ32の計測値に基づいて、リフト動作、ティルト動作及びアタッチメント動作に必要な作動油量をそれぞれ求め、各必要作動油量を積算して荷役動作に必要な総作動油量を求め、その総作動油量に応じて荷役モータ28を駆動する。このとき、リフトレバー操作角センサ30、ティルトレバー操作角センサ31、荷重センサ33及びティルト角センサ34の計測値に基づいて、リフトレバー及びティルトレバーの操作が無効であることが検出されたときは、リフト動作及びティルト動作に必要な作動油量をゼロとする。
(もっと読む)
産業車両の荷役チルト装置
【課題】運転者の視界を確保し、作業性を向上させる産業車両の荷役チルト装置を提供することを目的とする。
【解決手段】フォークリフト10の前輪16の車軸17に回動可能に支持された荷役装置12を有し、荷役装置12を前後に傾斜させる産業車両の荷役チルト装置において、荷役装置12に立設されたマスト13に設けられ、荷役装置12を車軸17に回動可能に支持するマスト支持部20と、マスト13に設けられ、マスト支持部20から車両後方に向かって延設された張り出し部21と、張り出し部21の車両後方側の端部に設けられ、この端部を鉛直方向に移動させるアクチュエータ22とを備え、アクチュエータ22により張り出し部21の端部を鉛直方向に移動させることにより、荷役装置12を前後に傾斜させる。
(もっと読む)
産業車両用油圧制御装置
【課題】省エネ化をより一層図ることが可能な産業車両用油圧制御装置を提供する。
【解決手段】産業車両用油圧制御装置は、オイルタンクと、油圧ポンプと、第1経路と、第2経路と、バイパス経路55bと、制御弁と、圧力補償弁とを備える。圧力補償弁は、弁室50aと、弁室50a内に形成され、負荷圧が印加される第1パイロット室51と、弁室50a内に形成され、供給圧が印加される第2パイロット室52と、弁室50a内に移動可能に収納され、負荷圧と供給圧とに基づいて移動するスプール55と、スプール55の移動量D1を検出するスプール移動量検出手段60とを有する。油圧制御装置は、スプール移動量検出手段60が検出した移動量D1に基づいて、第1閾値G1、第2閾値G2、第1範囲E1、第2範囲E2、第3範囲E3を定め、電動モータの回転数を制御する電動モータ制御手段をさらに備える。
(もっと読む)
産業車両
【課題】操作者の疲労を軽減できる産業車両を提供する。
【解決手段】産業車両1は、荷役用シリンダ4と、操作者の荷役用シリンダ4に対する操作が入力される操作手段としてのダイヤル12と、ダイヤル12からの出力信号に基づいて荷役用シリンダ4を制御する制御手段としてのコントローラ29、油圧回路60とを備える。ダイヤル12は、操作者が動かした指先の変位量に対応する第1変位量D1と、指先の変位速度に対応する第1変位速度V1とを出力信号として制御手段に伝達する。コントローラ29は、第1変位量D1に基づいて荷役用シリンダ4の変位量である第2変位量D2を算出し、かつ第1変位速度V1に基づいて荷役用シリンダ4の変位速度である第2変位速度V2を算出する算出手段21と、荷役用シリンダ4を第2変位速度V2で駆動して第2変位量D2まで変位させる駆動制御手段としての油圧回路60とを有する。
(もっと読む)
操作装置
【課題】簡単な構成にて操作スイッチ及びレバーの操作時に複数種類の動作を行うことができるようにすること。
【解決手段】ジョイスティック34は、互いに直交するX軸方向及びY軸方向に自由度を有するレバー35と、第1ポテンショメータ36と、第2ポテンショメータ37と、レバー35の上端部に設けられた押しボタンスイッチ38とから構成されている。そして、第1ポテンショメータ36と、第2ポテンショメータ37と、押しボタンスイッチ38は、車両制御装置29と電気的に接続されている。車両制御装置29には、CPU44、メモリ45とが設けられている。メモリ45には、マップが記憶されており、CPU44は、押しボタンスイッチ38が押されているときに、第1ポテンショメータ36及び第2ポテンショメータ37からの操作量検出信号とマップとに基づいて、CPU44に揚高自動停止動作及び水平自動停止動作をON又はOFFさせる。
(もっと読む)
筒状物運搬装置
【課題】 フォークリフト等の荷役車両に適用され、とりわけ線材がコイル状に巻かれた線材コイル等の筒状物を運搬する際に用いられる筒状物運搬装置に於て、設備費が余り掛からないと共に、ラム作業とフォーク吊下げ作業の両方を迅速に切り換えて行える様にする。
【解決手段】 キャリッジ2、フォーク3、ラム4、駆動手段5とで構成し、とりわけ、フォーク3の水平片8の少なくとも前半上面に重合される使用位置とこれから退避される不使用位置とをとり得るラム4と、ラム4を使用位置から不使用位置まで移動させる駆動手段5とを備えている。
(もっと読む)
シリンダ制御装置
【課題】油圧回路が複雑になることなく、簡易な回路で複動シリンダの伸縮作動を停止することが可能なシリンダ制御装置を提供する。
【解決手段】ロッド室4bと方向切換弁24とを接続するロッド側流路33と、ボトム室4aと方向切換弁24とを接続するボトム側流路31と、ロッド側流路33に設けられるロッド側パイロットチェック弁10Bと、ボトム側流路31に設けられるボトム側パイロットチェック弁10Aと、パイロット圧力を制御する電磁弁21とを備え、電磁弁21の切り換えにより、ロッド側パイロットチェック弁10B及びボトム側パイロットチェック弁10Aに、パイロット圧力が作用することでロッド側流路33及びボトム側流路31を遮断状態から開通状態に移行させること特徴とするシリンダ制御装置。
(もっと読む)
フォークリフト装置
【課題】トラクタに装着するときにトラクタ側の装着台に対してリフト枠の高さを調整してトラクタ前部の装着台に装着できるようにする。
【解決手段】トラクタ2の前部に装着された装着台3と、この装着台3に下部が横軸4廻り揺動可能に枢支されかつ着脱自在なリフト枠5と、このリフト枠5に昇降自在に支持されていてフォーク6を有するフォーク台7と、リフト枠5に設けられていて前記フォーク台7を昇降させる昇降手段8と、前記リフト枠5と装着台3との間に設けられていてリフト枠5を横軸4廻りにチルト動作させるチルト手段9とを有し、前記リフト枠5は、前記フォーク6を接地させた状態で装着台3から取り外し可能とされたフォークリフト装置において、前記リフト枠5とフォーク台7との間には、取り外し時のフォーク台7に対するリフト枠5の上下位置を調整して装着台3に対するリフト枠5の高さを調整する高さ調整手段10が設けられている。
(もっと読む)
走行機における作業具のリフト及びチルト機構用制御及び調整システム
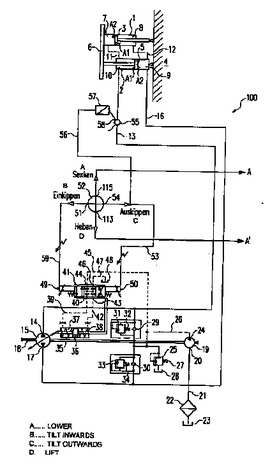
本発明は、少なくとも第1及び第2ショベルシリンダ(1,2)、少なくとも第1及び第2リフトシリンダ(61,62)、及び吐出量を調整可能な第1及び第2油圧ポンプ(15,75)からなる走行機におけるローディングショベル(6)のリフト機構(100)用油圧制御及び調整システムに関する。前記第1及び第2ショベルシリンダ(1,2)において、調整ピストン(3,5)はそれぞれ移動可能であり、第1及び第2ショベルシリンダ(1,2)を2つの調圧室(7及び8,9及び10)にそれぞれ分割する。同様に調整ピストン(63,65)も移動可能であり、2つのリフトシリンダ(61,62)を2つの調圧室(67及び68,69及び70)にそれぞれ分割する。第1油圧閉回路において、第1油圧ポンプ(15)の第1及び第2接続部(14,17)はショベルシリンダ(1,2)のピストン側調圧室(7,9)、及びショベルシリンダ(1,2)のピストンロッド側調圧室(10,8)にそれぞれ接続する。第2油圧閉回路において、第2油圧ポンプ(75)の第1及び第2接続部(74,77)はリフトシリンダ(62,61)のピストン側調圧室(70,67)、及びリフトシリンダ(62,61)のピストンロッド側調圧室(68,69)にそれぞれ接続する。
 (もっと読む)
(もっと読む)
1 - 13 / 13
[ Back to top ]