
Fターム[3F333FD03]の内容
フォークリフトと高所作業車 (11,384) | 検知量 (822) | 移動量、位置 (290) | 高さ方向 (128)
Fターム[3F333FD03]に分類される特許
1 - 20 / 128
クランプリフト
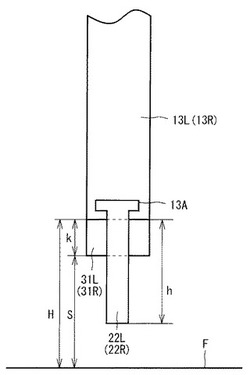
【課題】クランプアームを損傷させることなく、床面に散乱する物体を効率的に掻き集めるクランプリフトの提供。
【解決手段】クランプリフトのクランプアーム13には、下面から下方に突出する突出部材22を設ける。クランプアーム13の先端部下面には、床面Fとの距離を測定する距離センサ31を設ける。クランプリフトは、クランプアーム13で床面Fに散乱した物体を掻き集める前に、距離センサ31で測定した距離Hが、突出部材22の突出長さhよりも小さく、長さh/2よりも大きくなるように、クランプアーム13を昇降させる。そしてクランプアーム13が床面Fに接触せず、突出部材22が床面Fに接触する状態で散乱した物体を掻き集めるようクランプリフトを走行させる。これにより、クランプアーム13は床面Fに接触せず損傷することがなく、突出部材22により散乱した物体の捕集効率を向上させる。
(もっと読む)
油圧システムおよび該油圧システムを備えたフォークリフト

【課題】所定の順序動作が失われた場合であっても、容易に所定の順序動作に復帰させることができる油圧システムおよび該油圧システムを備えたフォークリフトを提供する。
【解決手段】フォークを昇降させる第1油圧シリンダ5と、第1油圧シリンダ5が設けられたインナマストを昇降させる第2油圧シリンダ6A、6Bと、第1および第2油圧シリンダ5、6A、6Bを接続する配管11、12と、油圧装置10Aとを備えた油圧システム1Aであって、油圧装置10Aは、油圧ポンプ15および油圧モータ16と、第1および第2油圧シリンダ5、6A、6Bの動作を検知する検知手段17a、17bと、第1および第2油圧シリンダ5、6A、6Bが所定の順序で動作しているかどうかを判定する順序判定部18と、順序判定部18により所定の順序で動作していないと判定されると油圧モータ16の回転数を減少させる制御部19と、を有することを特徴とする。
(もっと読む)
リーチ型フォークリフト
【課題】フォークで荷役を持ち上げるときに、車体の転倒を防止して安定性を保ち、シリンダからの衝撃音を防止できるようにする。
【解決手段】第1管路31を開閉する第1開閉バルブ41と、第4管路34を開閉し、閉じた状態において作動油が第2管路32からオイルタンク80へ逆流することを防止する逆止弁機能を有するポペットバルブからなる第2開閉バルブ42と、第3管路33に設けられ、作動油が第1管路31からオイルタンク80へ逆流することを防止する逆止弁40と、を備え、制御部93は、リーチ型フォークリフトが走行してフォーク66が停止するときには、第1開閉バルブ41を開き、第2開閉バルブ42を閉じて、リーチ型フォークリフトが停止してフォーク66が作動するときには、第1開閉バルブ41及び第2開閉バルブ42を閉じる。
(もっと読む)
フォークリフト
【課題】表示手段に表示された油圧操作部をタッチ操作してフォークを操作するフォークリフトにおいて、フォークの誤動作を防止する。
【解決手段】フォークリフトの表示装置のディスプレイ24には、中央に基準位置40が設定されたリフト操作部4が表示される。表示装置にはリフト操作部4に対するタッチ操作を検出するためのタッチセンサ25が設けられる。制御装置は、オペレータが2本の指80、81でリフト操作部4の基準位置40をタッチし、2本の指80、81のいずれか一方の指で基準位置40をタッチしたまま、他方の指で基準位置40から上方向または下方向にスライド操作すると、フォークを起動し、それから2本の指80、81の双方をタッチし続けると、フォークを上昇または下降させ続け、2本の指80、81の双方またはいずれか一方のタッチを解除すると、フォークのリフト動作を停止させる。
(もっと読む)
把持装置
【課題】搬送元と搬送先の載置面の高さが異なってもワークが載置面に着地するアームの昇降位置を把握できる把持装置の提供にある。
【解決手段】把持装置20は一対のアーム21の下端にワークWの載置面までの距離(アーム高さh)を測定する測距センサ40を備える。把持装置20はワークWを把持するときの把持高さをメモリに記憶しておく。ワークWを載置面fに載置する際は、測距センサ40にて検出するアーム高さhとメモリに記憶した把持高さを比較してアームの昇降位置を把握する。
(もっと読む)
荷役車両
【課題】昇降支持体の厚みを薄くすることができ、かつ大重量の荷をリフト可能な大きい駆動力を得、さらに荷の荷重を分散できて床面の損傷を防止する。
【解決手段】フォーク部リフト装置51は、フォーク部リフトシリンダ59により出退駆動されてくさび面60tを有する駆動くさびブロック60と、幅方向の水平支軸54を介して上下方向に揺動自在な揺動レバー55の後端部に設けられて駆動くさびブロックの60によりくさび面60t,58tを介して押し上げられる受動くさびブロック58と、揺動レバー55の前端部に幅方向の車輪支持軸57を介して設けられて上下方向に揺動自在に支持された車輪支持フレーム57と、車輪支持フレーム57に前後方向に所定間隔をあけて配置された複数の遊転車輪52とを具備した。
(もっと読む)
リフトチェーンのメンテナンス時期告知装置
【課題】 フォークリフト等の荷役車両に用いられるリフトチェーンのメンテナンス時期告知装置であって、リフトチェーンの伸び量を逐一測定する必要がなく、それでいてリフトチェーンが伸びてメンテナンスの時期に達した際には、これが容易に判る様にする。
【解決手段】 マスト2、キャリッジ3、リフトチェーン4、チェーン検出器5、告知器6とで構成し、とりわけ、リフトチェーン4が所定量だけ伸びた事を検出するチェーン検出器5と、チェーン検出器5からの信号に依りリフトチェーン4が伸びた事を告知する告知器6とを設ける。
(もっと読む)
荷役作業車両の管理装置
【課題】 作業環境が異なる場合でも、運転者の技能を適切に判定することが可能な指標を提供する荷役作業車両の管理装置を提供する。
【解決手段】 荷役作業車両の管理装置が、処理装置を有する。この処理装置は、荷物を持ち上げて走行する荷役作業車両から取得された運転情報に基づいて、エネルギ消費量、及び作業環境に依存する稼動状況変数を算出する。さらに、算出された稼働状況変数の大きさに応じて、前記エネルギ消費量を正規化して正規化エネルギ消費量を算出する。
(もっと読む)
高所作業車
【課題】作業台に設けられた副作業台により高所作業車の作業台が拡張された状態であっても副作業台が所定の最大移動位置を超えることなく昇降装置を作動させることができる高所作業車を提供する。
【解決手段】軌陸作業車1は、作業台30上に設けられ、作業台30よりも上方に位置する副作業台70と、作業台30が所定の最大揚程hを超えないように設定された第1作動範囲内で昇降装置20の作動を制御する第1昇降制御と、副作業台70が前記最大揚程hを超えないように設定された第2作動範囲S2内で昇降装置20の作動を制御する第2昇降制御とを切り替えて昇降装置20の作動を制御することが可能に構成されたコントローラ(昇降作動制御装置)とを備えて構成される。
(もっと読む)
フォークリフトおよび重心位置測定装置
【課題】フォークリフトによって運搬される荷物の鉛直方向の重心位置を求めることができるようにする。
【解決手段】一対のフォーク11R,11Lには、それぞれ前後方向に間隔をあけてロードセル141〜144が設けられ、一方のフォーク11Rには、その傾斜角度を検出する傾斜センサ15が設けられ、前記フォーク11R,11Lに載せられた荷物であるコンテナ13の鉛直方向の重心位置を、前記ロードセル141〜144の検出出力および傾斜センサ15の検出出力に基づいて、演算するようにしている。
(もっと読む)
フォークリフト
【課題】車体の地上高さや駆動輪の輪重等を簡単に調整できるようにする。
【解決手段】駆動輪10を上下に揺動するためのドライブシリンダ11と、補助輪20を上下に揺動するためのキャスタシリンダ21と、ドライブシリンダ11の第1室とキャスタシリンダ21の第1室とを接続する第1管路31と、ドライブシリンダ11の第2室とキャスタシリンダ21の第2室とを接続する第2管路32と、作動油ポンプ81と制御弁73,74,75との間を第1管路31に接続する第3管路91と、第3管路91を開閉する切換バルブ90とを備え、制御弁73,74,75は、アンロード状態のときに絞り回路が構成されるようになっており、センサー94の検出結果に基づいて、制御弁73,74,75がアンロード状態のときに、作動油ポンプ81を駆動して切換バルブ90を開く調整動作を行う。
(もっと読む)
ワイヤリフト
【課題】 本発明は、手動式ワイヤリフトにおいて、落下防止のための自動ロック手段を具備し作業員の転落事故の起らない安全性の高いワイヤリフトを提供することを目的とする。
【解決手段】
第1主ワイヤ9に弛緩又は切断が発生した時ストッパー12が傾斜し、第1中管15が嵌挿している通口13の周縁部で同第1中管の周囲を挟み、次に第1解除ワイヤ25を操作して解除駒24を前傾動すると、解除駒の前端部が傾斜しているストッパーの一端部を叩き、ストッパーを水平位置に戻し、ストッパーと第1中管との固定関係を解除し、ストッパーは直に傾斜位置に戻り、再度第1中管をストッパーの通口周縁部が挟み、この一連の動作を繰返すことにより、第1中管は微少巨離降下し、この動作を続けて第1中管は第2支柱5まで降下し、第2支柱を降下するために第1支柱4の外側部に付設する解除棒34によって、解除駒に連設する解除ワイヤを引いて放すものである。
(もっと読む)
リーチ式フォークリフト
【課題】迅速且つ安全に高揚高での荷役作業を行い得るリーチ式フォークリフトを提供する。
【解決手段】後方の本体部3及び本体部3から前方に突出された左右一対のアウトリガー部を有する車両本体と、車両本体のアウトリガー部に前後方向で設けられたガイド溝に移動可能に案内される荷役装置とを有するリーチ式フォークリフトであって、荷役装置を、両側面にガイド溝に案内される前後一対のガイドローラが夫々設けられた移動体と、移動体に、昇降用シリンダ装置13aを介して少なくとも昇降自在に設けられた荷物保持用のフォーク部とから構成し、更にフォーク部の高さを検出するリミットスイッチ24と、フォーク部に作用する荷重を検出する圧力計38及び荷重演算部39とを具備させ、且つ両検出値に基づいて、荷役装置の前後方向における移動速度と車両本体の走行速度とを制限する速度制御部51を具備させたことを特徴とするリーチ式フォークリフト。
(もっと読む)
電気式フォークリフト
【課題】 電気式フォークリフトに適用される荷重表示装置に於て、フルフリーマストを装備したものであっても、容易に荷重を表示できる様にする。
【解決手段】 走行用モータ2、インバータ3、走行操作検出器4、フォーク用リフトシリンダ5、マスト用リフトシリンダ6、マスト揚高検出器7、圧力センサ8、制御装置9、速度計10、荷重計11とで構成し、とりわけ、フォーク用リフトシリンダ6とマスト用リフトシリンダ5との切換え作動時のマスト揚高を検出するマスト揚高検出器7と、両リフトシリンダ5,6への作動油の圧力を検出する圧力センサ8と、マスト揚高検出器7からのマスト揚高と圧力センサ8からの圧力と両リフトシリンダ5,6のシリンダ径とに基づいてフォーク16上の荷重を演算する制御装置9と、制御装置9からの荷重を表示する荷重計11とを備えている。
(もっと読む)
昇降式の物品搬送装置
【課題】一対の昇降駆動手段により昇降台を両側から支持しながら昇降させることができ、構成の簡素化及びコストの低減を図りながら、一対の昇降駆動手段においてネジ部が適正に回転しているか否かを判別することができる昇降式の物品搬送装置の提供。
【解決手段】昇降台8を挟む状態で設けられた一対の昇降駆動手段12の夫々は、ネジ部16を回転駆動させる回転駆動部と、ネジ部16の回転駆動により昇降されるナット部と、ナット部の昇降により昇降台8を昇降自在に支持する連結支持部19とを備え、一対の昇降駆動手段12の少なくとも一方側には、ネジ部16が回転しているか否かを検出する回転センサ45が備えられ、回転駆動部にてネジ部16を回転させたときに、回転センサ45の検出情報に基づいて、ネジ部16が適正に回転していないネジ部回転異常状態であるか否かを判別するネジ部回転異常状態判別手段が備えられている。
(もっと読む)
車両用操舵装置
【課題】一般に、積載荷重が大きいほど、また、積載物の位置が高いほど、旋回走行時のモーメント荷重が大きくなり、フォークリフトが不安定となる傾向にある。そこで、走行中に荷物が安定し、安定した走行を確保することができる車両用操舵装置を提供する。
【解決手段】積載荷重Wが大きいほど、また積載部高さHが高いほど、すなわち積載負荷W・Hが大きいほど、伝達比R(θw /θh )を小さくする。また、車速Vが大きいほど、伝達比を小さくする。転舵輪としての後輪の実質的な転舵速度を小さくし、走行時にフォークリフトが受けるモーメント荷重を抑制する。
(もっと読む)
フォークリフトのスプレッダ位置合わせ装置及び該装置を備えたフォークリフト
【課題】簡単な構成でスプレッダの前後傾動をマストの動作を独立して行わせ、コンテナの載置を容易にするフォークリフトのスプレッダ位置合わせ装置及び該装置を備えたフォークリフトを提供する。
【解決手段】スプレッダ9の前後傾動がマスト6の動作と独立して行われる前後傾動手段を備え、前記前後傾動手段は、車体2の進行方向前方に突出して形成されるスプレッダ支持体8と、該スプレッダ支持体8に支持されるスプレッダ9と、前記スプレッダ支持体8とスプレッダ9が流体圧シリンダ11a、11bを介して連結される連結部とからなり、前記流体圧シリンダを伸縮させてスプレッダが前後に傾動するようにした。
(もっと読む)
産業車両の自動揚高停止装置
【課題】目標とする揚高位置に容易に荷役装置を停止させること。
【解決手段】車両制御装置のCPUは、リフトレバーに備えられた揚高選択ボタンが押込み操作される毎に、メモリ領域にそれぞれ記憶された揚高位置SY1〜SY3を切り替えて選択するようになっており、フォーク21(荷役装置)を自動的に停止させる目標揚高位置として揚高位置を運転者が選択できるようになっている。そして、車両制御装置は、メモリ領域に記憶された揚高位置の何れかを目標揚高位置として選択した状態で、リフトレバーが上昇指示方向に傾動操作されると、選択した揚高位置を目標揚高位置として確定し、該目標揚高位置にフォーク21(荷役装置)を停止させるように電磁比例弁を制御する自動揚高停止制御を実行する。
(もっと読む)
産業車両の自動揚高停止装置
【課題】複数の記憶領域に記憶されている揚高位置を把握すること。
【解決手段】車両制御装置(CPU)は、メモリ領域に記憶された複数の揚高位置のうち、運転者により選択された最寄りの揚高位置に対しフォーク(荷役装置)が自動的に停止されるように電磁比例弁を制御可能に構成されている。また、フォークリフトに備えられた表示器26aの画像領域HRには、フォーク(荷役装置)の揚高位置を示す揚高シンボルを各メモリ領域に対応付けて表示可能な情報表示領域RA〜RCが設定されている。そして、車両制御装置は、メモリ領域に記憶された揚高位置の大小を比較して大小関係を判定し、該判定結果に基づいて大小関係データを各メモリ領域に割り当てるとともに、割り当てた大小関係データに対応する揚高シンボルH2,H4,H6を情報表示領域RA〜RCに表示させるようになっている。
(もっと読む)
産業車両の走行制御装置
【課題】車両走行中に制限内容が変更された場合には加減速度に制限を加えることで急加速や急減速を抑制して車両の走行安定性を確保するとともに、走行安定性を確保した状態で加減速度の制限を容易に解除すること。
【解決手段】車両制御装置は、荷役状態を検出して車両走行時の最高車速及び加減速度に制限を加えるか否かを判定し、その判定結果をもとに制限内容(最高車速値及び加減速度値)を決定する。そして、モータコントローラは、荷役状態の変化に伴って制限内容を変更する場合、最高車速については変更後の制限内容にしたがって制御を実行し、加減速度については予め定めた加減速度値を選択して加減速度制御を実行することで、急加速や急減速を抑制する。そして、モータコントローラは、アクセルペダルの踏込み操作量に対応する車速と実車速の車速差が予め定めた条件を満たすと、加減速度値を変更後の制限内容に対応する加減速度値に戻す。
(もっと読む)
1 - 20 / 128
[ Back to top ]