
Fターム[3G093CB11]の内容
車両用機関又は特定用途機関の制御 (95,902) | 制御・作動条件(機関以外) (4,250) | 定速走行 (558) | 定速走行の設定 (73)
Fターム[3G093CB11]に分類される特許
1 - 20 / 73
運転支援装置及び運転支援方法
【課題】カメラ17で制限車速標識を撮像し、撮像した画像から制限車速情報を読み取ることをしなくても、地図データに示された制限速度情報を更新可能とする。
【解決手段】地図データの情報に基づき取得した走行道路の制限車速情報、及び運転者が車速変更のために操作する目標車速変更操作子の操作情報に基づき目標車速を求め、その求めた目標車速となるように車両の制駆動力を制御する。また、本発明は、上記目標車速変更操作子の操作を検出すると、上記地図データ中の制限車速切り替わり位置SPの情報を更新する。
(もっと読む)
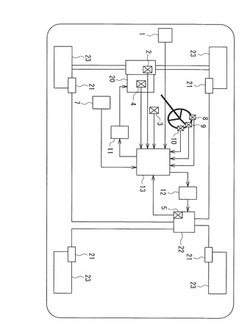
ハイブリッド電気自動車の制御装置

【課題】定速走行制御下における燃費性能の改善を図ると共に、高度な安全性を有するハイブリッド電気自動車の制御装置を提供する。
【解決手段】ハイブリッド電気自動車(1)の制御装置(26)は、走行路面の勾配情報を取得する手段(17)と、走行速度を検出する手段(16)と、車間距離を検出する手段(18)と、走行路面が下り勾配を有する場合に、下り勾配の最下地点bより手前側に設定された惰性走行開始地点aから惰性走行を開始し、車間距離が所定車間距離L1未満となった場合に前記惰性走行を中止する制御手段(26)とを備える。
(もっと読む)
車両用走行制御装置
【課題】クルーズ走行などの自動走行に移行する際に、運転者に与える違和感を抑えることを可能とする。
【解決手段】運転者によるステアリングスイッチ28の操作によって定速走行に移行する際に、エンジン停止の処理中若しくはエンジン停止処理に移行したと判定すると、EVモードに移行することなく、エンジンを運転状態に復帰させる処理を行う。
(もっと読む)
制御装置
【課題】坂道において安全にアイドリングストップするための制御を行う制御装置を提供すること。
【解決手段】移動体に備えられ、
前記移動体の停止する位置が坂道であるか否かを判定する制御部を備える制御装置であって、
前記制御部は前記移動体が停止する位置が坂道であるときに、アイドリングストップに関する制御と所定の制御を行うことを特徴とする。
(もっと読む)
車両制御システム
【課題】車両の制御における制御目標を適切なものとすることができる車両制御システムを提供すること。
【解決手段】道路上の車両の走行状態に関する情報に基づいて要求される第一の要求加速度acooperateおよび自車両の直前を走行する先行車あるいは自車両の前方の障害物の少なくともいずれか一方と自車両との相対関係に基づいて要求される第二の要求加速度aaccから目標加速度を選択する場合、第一の要求加速度および第二の要求加速度のうち最小の加速度を目標加速度として自車両の加速度を制御する。
(もっと読む)
車両制御システム
【課題】設定された車速を目標車速として車速を自動制御する場合の燃費を向上可能な車両制御システムを提供する。
【解決手段】車両の動力源と駆動輪との間で動力を伝達する流体伝達機構と、流体伝達機構と並列に設けられ、流体伝達機構を介さずに動力源と駆動輪とを機械的に接続する係合状態と、機械的に接続しない開放状態とに切替え可能で、かつ開放状態で車両の車速が第一車速以上となった場合に係合状態に切り替わるロックアップ装置とを備え、運転者により設定された第二車速を目標車速として車速を自動制御する所定走行制御(S1肯定)において、第二車速が第一車速よりも低い車速であり(S2肯定)、かつロックアップ装置が開放状態である(S3肯定)場合、車速を第一車速以上の車速まで上昇させる加速制御を実行し(S4)、加速制御によりロックアップ装置が係合状態に切替わった後に第二車速を目標車速として車速を制御する。
(もっと読む)
車両追従制御装置
【課題】 目標車速の手動設定を省略できる車両追従制御装置を提供する。
【解決手段】 ドライバのアクセル操作状態を検出するアクセル開度センサ110と、アクセル開度センサ110によりアクセルOFFが検出された場合、自車両と先行車との相対関係を維持する追従制御に介入する速度制御部102aを有するブレーキECU102と、を備え、ブレーキECU102は、速度制御部102aによる追従制御介入時の自車両の速度に基づいて、追従制御時の上限車速を設定する上限車速設定部102bを備えた。
(もっと読む)
車速制御装置
【課題】車両の運転状態に応じて一定速走行を開始することのできる車速制御装置を提供する。
【解決手段】所定時間内における車両の速度Vが所定の車速の範囲内である場合に車速Vを一定に制御する車速制御装置において、所定時間内における車両の運転状態に応じた車速Vの変化幅が所定の変化幅ΔVよりも小さいことを判断する変化幅判断手段(ステップS3)と、所定時間内における車両に対し制動力を発生させる制動力要求操作の操作頻度が所定頻度よりも小さいことを判断する制動力要求操作頻度判断手段(ステップS4)と、車両の速度の変化幅が所定の変化幅ΔVよりも小さく、かつ制動力を発生させる制動力要求操作の操作頻度が所定頻度よりも小さく、かつ駆動力を発生させる駆動力要求操作がOFFになった場合に、車速が一定になるように制御を開始する一定速制御開始手段(ステップS9)とを備えている。
(もっと読む)
車間距離制御装置
【課題】運転者による加減速操作に応じて目標車間距離を変更した場合にドライバビリティの悪化を防止する車間距離制御装置を提供することを課題とする。
【解決手段】先行車との車間距離が目標車間距離になるように車両を制御する車間距離制御装置であって、運転者の加速操作を検出する加速操作検出手段と運転者の減速操作を検出する減速操作検出手段の少なくとも1つの操作検出手段と、自車と先行車との車間距離を取得する車間距離取得手段と、運転者の加速操作又は減速操作に応じて車間距離に基づいて目標車間距離を変更する目標車間距離変更手段と、自車と先行車との相対速度を取得する相対速度取得手段とを備え、目標車間距離変更手段は、加速操作終了が検出された後又は減速操作終了が検出された後に、自車と先行車との相対速度が零になったときの車間距離に基づいて目標車間距離を変更することを特徴とする。
(もっと読む)
ハイブリッド車両の制御装置
【課題】EVモード走行時のモータの実モータトルクから、HEVモード走行時の目標エンジントルクを求めることで、目標エンジントルクとエンジン実トルクとのずれを抑え、EVモードからHEVモードへの切換時のトルク変動を抑えることを安価に達成できるハイブリッド車両の制御装置を提供すること。
【解決手段】統合コントローラ10は、オートクルーズ制御時での、EVモード走行時に、車速が目標車速に収束した時点のEV時モータ実トルクを求め、その後の、HEVモード走行時のHEV時モータ実トルクから、エンジン実トルクを求め、エンジン実トルクと目標エンジントルクとの相違に基づいて、HEV走行時の目標エンジントルクを補正する目標エンジントルク算出処理を行なうハイブリッド車両の制御装置とした。
(もっと読む)
走行支援装置
【課題】 一定車速での走行を支援する際に、燃費の向上を図ることができる走行支援装置を提供する。
【解決手段】 走行制御ECU1は、目標車速Vtとする一定車速での走行制御を支援する。このとき、坂路の手前の区間において、坂路走行による車速変化と逆方向の車速変化を許容して支援を行う。たとえば、上り坂路の手前位置では、減速を抑制する制御を行い、下り坂路の手前位置では、加速を抑制する制御を行う。
(もっと読む)
車両用オートクルーズ装置
【課題】セットスイッチのみを1回操作するだけでオートクルーズ走行を開始することができ、かつ誤操作を防止できる車両用オートクルーズ装置を提供する。
【解決手段】車両に搭載されたオートクルーズ制御コンピュータ25は、この車両がオートクルーズに適した速度で走行し、車速変動とアクセル操作の変動が所定値以内であり、車間距離が適正値以上に保たれ、ブレーキが作動しない、という条件が全て満たされた状態が所定時間以上続いたときに、オートクルーズ受付許可状態となり、インジケータランプ21を点灯させる。オートクルーズ受付許可状態において、セット/レジュームスイッチ30を第1の方向R1に操作すると、オートクルーズ走行が開始する。オートクルーズ受付許可状態において、車速が低下するなどしてオートクルーズ受付許可状態を解除する条件が成立すると、オートクルーズ受付許可状態が解除されるとともに、インジケータランプが消灯する。
(もっと読む)
車両の速度制御装置
【課題】連続する2つのカーブを通過する際において運転者の感覚に合致した違和感の少ない速度制御を達成できる車両の速度制御装置を提供すること。
【解決手段】連続カーブ車速制御において、目標車速特性Vtoが、第1カーブの目標特性Vto1、カーブ間の目標特性Vtoz、第2カーブの目標特性Vto2が順に繋げられて構成される。第1、第2カーブの目標特性Vto*は、地点Pcr*まで減少して地点Pcr*にて適性車速Vqo*となり、その後、地点Pca*までVqo*に維持され、その後、地点Pca*から増大する特性a*−b*−c*−d*に決定される。カーブ間に対する制限車速Vqolが、適正車速Vqo*のうち大きい方にカーブ間距離に基づいて演算される増分Vupが加算されて演算される。このVqolに基づいてカーブ間の目標特性Vtozが特性X-Yに決定される。車速が目標車速特性Vtoに基づいて調整される。
(もっと読む)
車速制限制御装置
【課題】車速制限制御中、加速により実車速を制限車速まで上昇させる時の駆動系の捻り振動で振動的なショックが発生するのを防止可能な車速制限制御装置を提案する。
【解決手段】実車速VSPが制限車速LmtVSPよりも低い状態での車速制限制御中、t1に運転者がアクセルペダルの踏み込みにより運転者要求駆動力DrvTdをステップ状に上昇させる加速操作を行うと、実車速VSPの上昇により車速偏差ΔVSPが図示のごとくに減少し、この減少に応じて車速制限用目標駆動力LmtTdも図示のように低下する。車速制限用目標駆動力LmtTdには一次遅れ処理を施して一次遅れ処理済車速制限用目標駆動力fLmtTdを求め、運転者要求駆動力DrvTdには変化率制限処理を施して変化率制限処理済運転者要求駆動力kDrvTdを求め、これらの低い方を最終的な駆動力指令tTdとして選択し、この駆動力指令tTdをエンジン出力制御に資する。
(もっと読む)
作業機の走行制御装置
【課題】作業装置を付け替えた場合にも、その付け替えた作業装置に対応する適切な作業速度を維持できる作業機の走行制御装置を提供する。
【解決手段】走行速度を検出する車速センサ19と走行機体3に装着される作業装置4の種別を判別する作業装置判別用切換スイッチ21を設ける。車速センサ19が作業装置4に適応した設定速度範囲vより逸脱した走行速度Vを検出した場合には、エンジン出力速度、及び/又は、静油圧式無段変速装置10の変速操作位置を切換えて、制御手段16で設定速度範囲に復帰させるべく構成してある。
(もっと読む)
走行支援装置
【課題】交通流の円滑化を図ることができる走行支援装置を提供する。
【解決手段】走行支援装置1は、設定車速受信部2、ミリ波レーダ3、クルーズレバー4、車速センサ5、ECU6、エンジン制御部7、ブレーキ制御部8、表示部9、設定車速送信部10を備えている。走行支援装置1では、ECU6によって自車両と先行車両との車間距離が所定の距離以上であり、自車両の設定車速よりも後続車両の設定車速が高い場合に、表示部9によって運転者に後続車両の設定車速が自車両の設定車速よりも高いことが報知される。更に、報知を行ってから所定時間が経過した後に、エンジン制御部7、ブレーキ制御部8によって自車両の設定車速が後続車両の設定車速に変更される。
(もっと読む)
車間距離制御装置
【課題】自車両を停止させる制御を行う際、自車両への急制動を低減する車間距離制御装置を提供する。
【解決手段】車両の前方に存在する先行車および先々行車を検出する検出手段から物体検出情報を取得し、物体検出情報に基づいて、先行車を対象とした第1目標停止位置候補および先々行車を対象とした第2目標停止位置候補を算出する。そして、第1目標停止位置候補および第2目標停止位置候補のうち、車両から近い方を当該車両の目標停止位置として決定する。
(もっと読む)
車両用走行制御装置
【課題】車両用走行制御装置において、カーブ走行時に乗員に与える違和感を低減する。
【解決手段】先行車に追従して走行する追従制御機構を有する車両走行制御装置は、ナビゲーション装置3から道路形状情報を取得して、自車両前方のカーブを検出するカーブ検出手段1と、検出されたカーブの形状に応じて、カーブ走行時の目標車速(以下、カーブ走行時目標車速)を算出する第1算出手段1と、先行車との状態に応じた車速(以下、追従車速)を算出する第2算出手段1とを備える。さらに、自車両の前方にカーブおよび先行車が検出されている場合であって、カーブ走行時目標車速が追従車速より小さいときは、先行車に対する追従制御を実行するために必要な所要加速度を、追従制御機構による追従加速度として設定するのではなく、所要加速度よりも低減させた加速度を追従加速度として設定する加速度抑制手段1と備える。
(もっと読む)
車間距離制御装置
【課題】運転者の意図に従って目標車間距離の変更を確実に行うことができる車間距離制御装置を提供することを課題とする。
【解決手段】先行車との車間距離が目標車間距離になるように車両を制御する車間距離制御装置であって、運転者の変速操作を検出する変速操作検出手段と、変速操作検出手段により検出した変速操作に基づいて目標車間距離を変更する目標車間距離変更手段とを備えることを特徴とし、特に、目標車間距離変更手段では、車間距離制御中に変速操作検出手段により高速シフトから低速シフトへの変更を検出した後に低速シフトから高速シフトへの変更を検出したときの車間距離に基づいて目標車間距離を変更したり、あるいは、車間距離制御中に変速操作検出手段によりマニュアルモードへの操作を検出した場合にマニュアルモードにおける各操作に応じて目標車間距離を拡大又は縮小する。
(もっと読む)
車両およびその制御方法
【課題】通常走行モードとは異なる特殊走行モードのときのアクセル開度に対して制御に用いる制御用開度を車速に応じたものとする。
【解決手段】通常走行モードが設定されているときにはアクセル開度Accをそのまま制御用開度Acc*に設定し、燃費優先走行モードが設定されているときにはアクセル開度Accに対して制御用開度Acc*が小さく設定される低感度領域が車速Vが大きくなるほど大きなアクセル開度範囲として且つこの低感度領域が定速走行するのに必要なアクセル開度Accを含む領域となるように設定された制御用開度設定用マップを用いて制御用開度Acc*を設定する。これにより、動力出力装置から出力するパワーを小さくし、過剰なパワーが動力出力装置から出力されるのを抑制することができる。この結果、燃費の向上を図ることができる。
(もっと読む)
1 - 20 / 73
[ Back to top ]