
Fターム[3H021EA18]の内容
非容積形送風機の制御 (3,184) | 制御系各部の構成 (882) | 表示部 (56)
Fターム[3H021EA18]の下位に属するFターム
電気的なもの (41)
Fターム[3H021EA18]に分類される特許
1 - 15 / 15
圧縮機の制御装置及び制御方法
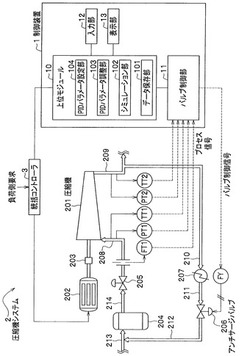
【課題】調整の手間を省くことができる、圧縮機の制御装置及び制御方法を提供する。
【解決手段】圧縮機201の吐出側の流体を吸込側に戻すアンチサージバルブ206をバルブ制御パラメータに基づいて制御するバルブ制御部11と、前記圧縮機201が設置されるプラント2のプラントモデル及び前記バルブ制御パラメータに基づいて前記圧縮機201の前記プラント2での運転状態をシミュレーションするシミュレーション部102と、前記シミュレーションの結果に基づいて、前記バルブ制御パラメータを調整する制御パラメータ調整部103と、を備える。
(もっと読む)
送風システム

【課題】扇風機などの送風システムの風の向きや強さをユーザが簡単かつ直感的に操作することを可能にする。
【解決手段】本発明は、送風機に対してインタラクティブ性を持たせることにより、風をユーザの意図通りに操作可能にするシステムを提供する。具体的には、送風機に対して風の向きや風の強さ(送風のオン/オフを含む)を指示するためのインタラクション手法として、「風を送るパスをディスプレイ上に描く手法」、「風を送るパスを実環境(実空間)中に描く手法」、「場所に指示マーカーを設置し風を制御する手法」の3種類の指示手法を実現する。
(もっと読む)
ファン故障検出装置およびファン故障検出方法
【課題】複数のファンが搭載されている電子機器において、各ファンの故障を確実かつ簡易な構成によって検出することができるファン故障検出装置およびファン故障検出方法を提供する。
【解決手段】ファン故障検出装置2は、電子機器内に設けられた複数個のファン1−1〜1−nの各々が故障しているか否かを検出する。選択部5は、故障診断モードにおいて、複数のファンの中から診断対象のファンを選択する。運転制御部4は、選択されたファンを動作させて、他のファンを停止させる。
(もっと読む)
ブレード監視システム
【課題】圧縮機ブレードの正常性を監視するシステムを提供する。
【解決手段】1つの実施形態において、ブレード監視システム120は、圧縮機4の負荷変化に応答してブレード到達時間(TOA)偏差信号の動的成分を抽出すること、動的成分を用いて、負荷変化の間の圧縮機ブレード10の固有周波数、負荷変化の間の圧縮機ブレード10のオーバーシュート、負荷変化の間の圧縮機ブレード10の立ち上がり時間、負荷変化の間の圧縮機ブレード10の減衰係数、又は負荷変化後の圧縮機ブレード10のセトリング時間のうちの少なくとも1つを算出すること、固有周波数、オーバーシュート、立ち上がり時間、減衰係数、又はセトリング時間のうちの少なくとも1つに基づいて圧縮機ブレード10が損傷を受けたか否かを判定すること、を含む動作を実施することにより、負荷変化の間の圧縮機を監視するよう構成された少なくとも1つのコンピュータデバイスを含む。
(もっと読む)
送風装置
【課題】高所に設置した場合でも複数備える送風機の各々について運転/停止の判別及び正常に動作しているか否かの確認が可能な送風装置を得ること。
【解決手段】電動機と、それを駆動源として回転する羽根車20とを有する送風機を複数個並列に設置した送風装置10であって、電動機の各々に対応して設けられたランプ24と、それぞれの電動機に対応するランプ24を、電動機が正常に運転されている時には点灯させ、停止している時には消灯させ、異常運転時には点滅させる制御回路とを有する。
(もっと読む)
多段圧縮機の故障検出及び保護
【課題】圧縮機の部品の故障を早期に検出し、早い段階で故障を識別する。
【解決手段】システム10は、回転機械16,20の動翼の複数の段の間の段間位置でのパラメータを検知するように構成された段間センサ18,22を含む。システム10はまた、検知された段間パラメータに少なくとも部分的に基づいて、回転機械の故障を識別するように構成された制御装置14も含む。システム10は、多段圧縮機16の段の間の段間圧力測定18を取得するように構成された制御装置14を含む。制御装置14はまた、段間圧力測定18に少なくとも部分的に基づいて、多段圧縮機16の実際の損傷を識別するように構成されている。
(もっと読む)
電気掃除機
【課題】電動送風機の整流子とカーボンブラシとの摩擦によって発生する火花を検出して電動送風機の運転を停止するとともに、停止後についても電動送風機を制御する制御装置を働かせ、電動送風機の発煙・発火を未然に防ぐことができる電気掃除機を提供する。
【解決手段】集塵室に吸引負圧を作用さえる電動送風機の整流子とカーボンブラシとの摩擦によって発生する火花を検出する火花検出手段と、この火花検出手段からの火花検出情報に基づき、電動送風機を制御する制御手段を備え、火花検出手段は、サンプリングした値の前回値と今回値の差を求め、この差から次回の値を予測し、予測した値と測定した値との差が所定値より大きい場合に、火花が発生したと判断し、制御手段は、火花検出手段が火花発生と判断したら電動送風機の運転を停止させ、停止後は、この電動送風機を再起動させない。
(もっと読む)
ファン運転支援装置およびファン運転支援システム
【課題】ファンを含む設備の調整作業を容易にすること。
【解決手段】ファン運転支援装置1は、ファンの定格回転数時の風量特性を記憶するファン特性記憶手段2と、前記ファン特性記憶手段2で記憶する前記ファンの定格回転数時の風量特性と前記ファンの回転数からファンの回転数調整時風量特性を計算する回転数調整時風量特性計算手段4と、前記ファンと接続された系統の風路抵抗特性を計算する系統抵抗計算手段6と、前記回転数調整時風量特性計算手段の計算結果4と前記系統抵抗計算手段6の計算結果を表示する表示手段7aとを有する。
(もっと読む)
圧力脈動解析装置
【課題】配管系全体における減衰の影響を考慮した圧力脈動解析装置を提供する。
【解決手段】圧力脈動解析装置100において、変動速度分布形状算出部104は、入力された設定条件を用いて、配管系における変動速度の分布形状を、圧力脈動の減衰を考慮せずに算出する。全損失エネルギ算出部106は、変動速度分布形状に基づいて、配管系全体で失われる脈動の全損失エネルギを算出する。支配方程式保持部112は、圧力脈動の減衰を考慮した形の、励振源における流体の支配方程式を保持する。等価減衰係数算出部108は、全損失エネルギを、励振源で失われる損失エネルギと設定し、励振源の等価減衰係数を算出する。励振源脈動応答解析部110は、支配方程式に、等価減衰係数を代入し、励振源における脈動応答を解析する。配管系脈動応答解析部114は、励振源における脈動応答と、変動速度の分布形状とに基づいて、配管系全体における脈動応答を解析する。
(もっと読む)
畜舎用送風装置
【課題】送風装置の送風ファンが所定の基準、あるいは、設定回転数で回転しているとき
、当該送風ファンが畜舎内に流入する外気の流速により事前に設定された回転数を一定時
間以上越えたり、低下して回転した場合は送風装置の運転を自動的停止させ、前記自動停
止した送風装置の送風ファンの外気による空転回転数が、事前に設定した回転数以下に降
下した場合、送風装置を自動的に再駆動させるようにした畜舎用送風装置を提供する。
【解決手段】 畜舎1内の長手方向に沿って直線状に配列されて吊設した複数の送風装置
2と、前記畜舎1内に取付けられて畜舎1内の温度を検出する温度検出センサ11と、前
記畜舎1の出入口13や窓14から畜舎1内に流入する外気の流速に応じて送風装置2へ
の通電及び通電停止を制御する駆動運転制御部20とを具備して構成したことを特徴とす
る畜舎用送風装置。
(もっと読む)
送風装置の駆動制御装置
【課題】畜舎内に設置した複数の送風装置を該送風装置の設置場所の温度を基礎として、送風装置の回転数(風量)を個々に設定可能とした送風装置の駆動制御装置を提供する。
【解決手段】 畜舎内に所定の間隔を保って複数台配設した送風装置2と、前記各送風装置2に個別に取付けた温度検出センサ26と、設定温度に対応する送風装置2の回転数を設定したプログラムを格納して前記送風装置2に設けた駆動制御手段20に送風装置の温度・回転数情報を送出するコントローラ7とからなり、前記送風装置2をコントローラ7にて設定した温度に対応する回転数にて起動させ、送風装置2の起動後は各送風装置2に取付けた温度検出センサ26にて検出した温度に対応する回転数情報を選択・設定して各送風装置2を駆動させるように構成したことを特徴とする。
(もっと読む)
ファン制御方法及びそれを実施する装置
【課題】 余計な電力消費及び装置内への埃の進入を最小限に抑えると共に、且つファンの自己復帰動作を有効に利用して故障判断の精度を高め、ファンが完全に故障してしまった場合を除いて可能な限りファン故障発生件数を減少させる。
【解決手段】 装置内と装置外との間で空気流を発生させるファンモータの制御で、駆動中のファンモータを停止させる際に、ファンモータが回転状態又は非回転状態のいずれの状態にあるかを検出しS507、ファンモータが非回転状態を示していた場合に、ファンモータを所定の第2時間T2だけ延長駆動しS508、延長駆動期間中にファンモータが回転状態を示すことがなければファンモータを故障状態と判定しS515、延長駆動期間中にファンモータが回転状態を示せばファンモータを正常状態と判定するS513。
(もっと読む)
電動ポンプ
【課題】流体の直進力や加速力を高めることができる電動ポンプの提供。
【解決手段】二重反転回転羽は駆動源の駆動力により互いに逆方向に回転し、また前方の軸なし第1反転回転羽と、該第1反転回転羽に対して後方に位置する軸なし第2反転回転羽は、それぞれ一端面から他端面に至るまで流体を一方向へと案内する中空部を有する筒状体と、これらの筒状体の内周面にそれぞれ螺旋状外周端が気密状に固定された幅広の羽本体とから成り、第2反転回転羽は、第1反転回転羽で生じた前方巻き込み流を受け入れ、かつ、逆方向に直しながら後方巻き込み流として圧送する電動ポンプ。
(もっと読む)
ターボ分子ポンプ装置
【課題】 モータ駆動用ケーブルの誤った取り外しに起因する電気部品の破損を確実に防止できるターボ分子ポンプ装置を提供すること。
【解決手段】 DSP制御装置2が、モータ12の指令回転速度を表す指令信号をインバータユニット3に出力してない時には、モータ12の駆動用の高圧用電源10とインバータユニット3とを電気的に遮断する一方、DSP制御装置が、モータ12の指令回転速度を表す指令信号をインバータユニット3に出力すると、高圧用電源10とインバータユニット3とを電気的に接続するパワーリレー6を、高圧用電源10とインバータユニット3との間に配置する。
(もっと読む)
ターボ機械駆動装置及びその制御方法
【課題】デュアルインバータシステムを用いたターボ機械駆動装置及びその制御方法において、両インバータを制御する主制御装置を省略し、互いの運転状態等を表す信号の伝達のための外部通信装置を不要とし、前記信号の取り合いを簡単に行い、装置の小形軽量化、低コスト化及び部品点数の減少を図る。
【解決手段】漏電しゃ断機(ELB1)(ELB2)、インバータ(INV1)(INV2)、ポンプ(4−1)(4−2)、電動機(5−1)(5−2)で完全二重系の給水システムが構成されている。インバータ(INV1)(INV2)は、互いに信号線(S3)で接続されており、互いの運転状態、故障状態及び他方の系に対する運転要求等の信号を取り合う。負荷状態を検出するセンサー群の内、流量信号を伝達する信号線(S4)(S5)が各インバータに直接に接続されており、圧力信号を伝達する信号線(S6)(S7)が両インバータに対して共通して接続されている。
(もっと読む)
1 - 15 / 15
[ Back to top ]