
Fターム[3J053DA23]の内容
流体伝動装置の制御 (6,334) | 入力信号 (2,017) | マニュアル操作装置(例;手動、足動) (198) | 変速選択装置 (95)
Fターム[3J053DA23]に分類される特許
1 - 20 / 95
作業車両の回生制御装置および作業車両の回生制御方法
作業車
【課題】サーボコントロール装置の性能に対する信頼性を向上させることができるとともに、無段変速装置を容易に操作することができる作業車を提供することを目的とする。
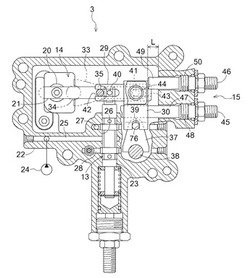
【解決手段】サーボコントロール装置3は、シャトルレバーの操作位置をサーボバルブ13に機械的に伝達してサーボバルブ13を制御するシャトルアーム33と、変速レバーの操作位置をサーボバルブ13に機械的に伝達してサーボバルブ13を制御する変速アーム37と、サーボシリンダの動作をサーボバルブ13に機械的に伝達して、シャトルレバーで設定された走行方向で且つ変速レバーの操作位置に対応する位置にサーボシリンダが達すると、サーボバルブ13を中立位置に機械的に制御してサーボシリンダを停止させるフィードバック機構14と、を備える。
(もっと読む)
作業車両

【課題】本発明は、HSTによって走行装置に伝動される動力を無段階に変速する作業車両において、エンジンを高速に回転させた場合と低速の回転させた場合の両方で、HSTを安定的に作動させることが可能な作業車両を提供することを課題とする。
【解決手段】本発明は、エンジン4からの動力によって駆動されるHSTポンプ16と、走行装置1側に動力を出力するHSTモータ17とから構成されたHST14を備え、該HST14によって走行装置1に伝動される動力を無段階に変速する作業車両であって、エンジン4からの動力を高低に変速してHSTポンプ16に伝動する変速機構19を設ける。
(もっと読む)
農作業機の走行伝動装置
【課題】HST伝動の速度レンジとHMT伝動の速度レンジを備えるものでありながら、油圧モータによる副変速を変速トラブルが無い状態で行えるようにする。
【解決手段】変速伝動機がHMT伝動を設定され、かつ無段変速部30の後進変速域での高速側への変速操作によって出力する合成駆動力を増速させる伝動状態にあると、油圧モータ33の高速側への変速制御を許容する。変速伝動機がHMT伝動を設定され、かつ無段変速部30の前進変速域での低速側への変速操作によって出力する合成駆動力を増速させ伝動状態にあると、油圧モータ33の高速側への変速制御を牽制する。
(もっと読む)
トラクタの変速操作装置
【課題】本発明は、高速直進走行から旋回走行への移行時における急旋回の防止を図るとともに、また、逆に耕耘等の低速直進の作業走行から旋回走行への移行時においては、速やかな旋回を行って作業効率を上げるようにすることを課題とする。
【解決手段】変速操作具(A)で前進位置・中立位置・後進位置に設定するシフト範囲を切り替えるトラクタの変速操作装置において、高速直進から旋回に移った場合に走行速度を低下させる構成とし、低速走行で耕耘等の作業を行っている時には、旋回速度を逆に速くする制御を行うように構成したことを特徴とするトラクタの変速操作装置の構成とする。
(もっと読む)
作業車両の変速装置
【課題】電動モータ9を駆動源としながら伝動機構の部品数を極力少なくして機体重量が比較的軽量な作業車両の変速装置を提供すること。
【解決手段】駆動軸11aに駆動力を供給すると共に、前進・後進・停止及び加減速を行なうために設けた駆動モータ9から駆動力を受けて駆動する油圧式無段変速装置(HST)23からなる作業車両の変速装置であって、変速装置23はモータ9により駆動される入力軸80と入力側傾斜板82とシリンダ84aを内装した入力側シリンダブロック84とレバー16により傾動角度が決められる傾斜板82の傾動角度に応じて、シリンダ84aからの油圧を受ける油圧閉回路を有するポートブロック85と該油圧閉回路からの油圧を受けるシリンダ86aを内装した出力側シリンダブロック86とシリンダ86aからの油圧を受ける出力側傾斜板88と該板88と一体の出力軸81とを有する。
(もっと読む)
作業車両の制御装置および制御プログラム
【課題】操作ストロークを増減させて微調整を行う場合にもオペレータの感覚通りの制御量(速度比)が得られるようにする。
【解決手段】第1のラインL11上の点から操作ストロークが増加して速度比が減少する方向に操作レバー装置が操作された場合には、第1のラインL11に従って速度比を演算する。第2のラインL12上の点から操作ストロークが減少して速度比が増加する方向に操作レバー装置が操作された場合には、第2のラインL12に従って速度比を演算する。第1のラインL11上の点から操作ストロークが減少して速度比が増加する方向に操作レバー装置21が操作された場合あるいは第2のラインL12上の点から操作ストロークが増加して速度比が減少する方向に操作レバー装置が操作された場合には、第3のラインL131、L132、L133、L134に従って速度比を演算する。
(もっと読む)
作業車両の制御装置および制御プログラム
【課題】操作ストローク範囲が短い操作装置を採用した場合であっても、車体振動等の影響による制御量(速度比)の変化が少なくオペレータの感覚通りの制御量(速度比)が得られるようにする。
【解決手段】コントローラは、操作ストロークの変化に応じて速度比が減少される第1のラインL11と、第1のラインL11に対してヒステリシスをもたせたラインであって、操作ストロークの変化に応じて速度比が増加される第2のラインL12と、操作ストロークの変化に応じて速度比が変化されるラインであって、操作ストロークの変化に対する速度比の変化が小さい第3のラインL131、L132、L133、L134とが設定されている。第1のライン上の点から操作ストロークが減少して速度比が増加する方向、あるいは第2のライン上の点から操作ストロークが増加して速度比が減少する方向の場合には、第3のラインに従って速度比を演算する。
(もっと読む)
作業車
【課題】変速ペダルの前方への踏み込み操作により前進側と後進側との走行速度の増速が可能な作業車を構成する。
【解決手段】操作量検出センサ38により変速ペダル16の前方への踏み込みが検出された場合には、制御装置48が、前後進切換スイッチ45の設定に基づいてサーボシリンダ27の作動方向を設定し、操作量検出センサ38で検出した変速ペダル16の前方への踏み込み操作量と、作動位置検出センサ31で検出した無段変速装置7のトラニオン軸25の作動位置とが合致するようにサーボシリンダ27を駆動する制御を行う。
(もっと読む)
作業車輌
【課題】コスト高騰化を可及的に防止しつつ過度の走行負荷によってHSTを含むトランスミッションが損傷することを有効に防止する。
【解決手段】実変速比/負荷トルクの関係とHSTを含むトランスミッションを保護する為の保護トルク値とが複数の変速比毎に記憶された制御装置は、設定変速比を目標変速比としてHSTの作動制御を行う車速制御モードと、HSTの入力側センサ及び出力側センサからの信号によって算出される実変速比と現在の目標変速比における実変速比/負荷トルクの関係とから推定される負荷トルク値が現在の目標変速比における保護トルク値を越えると実行される負荷制御モードとを有する。負荷制御モードは、変速操作部材の操作状態に拘わらず現在の目標変速比よりも低速の変速比を目標変速比としてHSTの作動制御を行う。
(もっと読む)
作業機械
【課題】高速直進走行からターン操作する際に、ターン操作の開始時点において高速から低速へ減速させることができる作業機械の提供。
【解決手段】本発明は、左走行レバー11の操作を検出する第1リミットスイッチ13と、右走行レバー12の操作を検出する第2リミットスイッチ14と共に、第1リミットスイッチ13から出力される信号、及び第2リミットスイッチ14から出力される信号に基づいて、左走行レバー11及び右走行レバー12の操作によって走行体1のステアリング操作が実施されようとしているかどうか判定する操作状態判定手段28bを含み、ステアリング操作が実施されようとしていると判定されたときに、左走行モータ23及び右走行モータ24の容量を制御する容量制御弁30に、左走行モータ23及び右走行モータ24を低速駆動させる容量に制御する制御信号を出力するコントローラ28を備えている。
(もっと読む)
作業車両のエンジンオーバーラン防止制御装置
【課題】メカブレーキの効きを早めることなくエンジンのオーバーランを防止するようにして、エネルギーロスを抑制して、燃費悪化やブレーキ装置のクーリング能力低下を防止する。
【解決手段】エンジン回転数検出手段31で検出された実際のエンジン回転数Neが、エンジンの最大回転数を超えた場合には、実際のエンジン回転数Neが高くなるほどインチング率の下限値IRLを高く設定して、この実際のエンジン回転数に応じたインチング率の下限値IRLと、ブレーキ操作手段26のブレーキストロークSに対応するインチング率設定手段36で設定されたインチング率IRとのうちいずれか高い方のインチング率が得られるようにHST油圧ポンプ16の容量を調整する。
(もっと読む)
油圧走行駆動装置
【課題】油圧ポンプおよび油圧モータを有する油圧閉回路を有する油圧走行駆動装置において、急逆操作を行った場合に、高圧のブレーキ圧の発生を抑制し、かつ、安価で信頼性の高い装置を提供する。
【解決手段】前後進切換操作レバーが、後進から前進に切換えられると、コントローラは、前後進切換操作レバーの入力方向と速度・進行方向検出器が検出した車両の進行方向が逆であるか否かを判断する。判断結果が肯定された場合、急逆操作が行われたと判断して、油圧式ポンプ傾転方向切換弁に対し、中立位置に保持する指令を出し、入力信号に対応した位置への切換の指令を遅延して出す。
(もっと読む)
車両の制御装置
【課題】ロックアップ差圧指示値と、それに起因するロックアップ差圧との関係を正確に求めて、スリップスタート制御の制御性の改善を図ることができる車両の制御装置を提供する。
【解決手段】車両発進後の速度比(エンジン回転数に対するタービン回転数の比)が所定値以上になった時点でのロックアップ制御時に油圧学習を実行する。この油圧学習が所定回数実行されるまではスリップスタート制御の実行を禁止する。油圧学習が所定回数実行されてスリップスタート制御実行許可条件が成立すると、次回の車両発進時にスリップスタート制御を実行する。
(もっと読む)
苗移植機
【課題】本発明では、作業時の燃料消費を抑えた、低燃費の苗移植機を提供することを課題とする。
【解決手段】
走行車体2にエンジン20と油圧無段変速装置23を設け、走行車体2の後部に圃場に苗を植え付ける苗植付装置52を設け、油圧無段変速装置23の出力を切り替えて機体の前後進及び走行速度を操作する変速操作レバー8を設けた苗移植機において、油圧無段変速装置23に駆動容量を変更可能な可変アクチュエータ29を設け、走行車体2の走行状態を検知する第1走行検知部材14と第2走行検知部材9を設け、第1走行検知部材14の検知する走行状態に合わせて可変アクチュエータ29の駆動容量とエンジン20の回転数を制御する制御装置6を設けて構成する。
(もっと読む)
船外機の伝動装置
【課題】ロックアップクラッチ及びトルクコンバータをを利用してエンジンの低燃費性及び船の加速性の両方を向上させ得る船外機の伝動装置を提供する。
【解決手段】トルクコンバータTと,このトルクコンバータTにおけるポンプ羽根車10及びタービン羽根車12間を連結し得るロックアップクラッチLとを備えてなり,タービン羽根車12に連結されるタービン軸3をプロペラ軸5に連結した船外機の伝動装置において,ロックアップクラッチLを通常,オン状態になるように構成すると共に,このロックアップクラッチLに,これをオフ状態にするように作動し得るアクチュエータ53を接続し,このアクチュエータ53を,エンジンの運転中,急加速運転時に作動するようにした。
(もっと読む)
作業車両
【課題】ゼロ発進または微速走行性能を向上できると共に、負荷の大きい高速移動作業においても、作業能率を簡単に向上できるようにした作業車両を提供する。
【解決手段】エンジン5を搭載した走行機体2と、前記エンジン5からの動力を変速する油圧ポンプ500及び油圧モータ501付きの油圧式無段変速機29と、前記エンジン5からの動力と前記油圧モータ501からの出力とを組み合わせた前記油圧式無段変速機29の変速出力が一方向の回転力として伝達される主変速出力軸36と、前記主変速出力軸36からの一方向の回転力を正転出力又は逆転出力に切り換える前後進切換機構41,43とを備える。前記油圧モータ501からの出力が逆転方向の出力制御状態で前記エンジン5からの正転回転数と前記油圧モータ501からの逆転回転数とが一致する場合に、前記走行機体2の移動速度が零になるように構成する。
(もっと読む)
走行制御装置
【課題】 簡単な機構により容易にオートクルーズ走行制御が可能となる。
【解決手段】 走行車体に設けられた変速ペダルと、変速ペダルの踏み込み量を検出するペダルセンサ30と、走行車体のエンジンの動力を変速して出力する油圧式無段変速機32と、ペダルセンサからの出力に基づいて、油圧式無段変速機32を制御する制御部31と、オートクルーズモードを指示するオートクルーズスイッチ42と、を備え、制御部31は、オートクルーズスイッチ42から指示が出された場合、その指示がなされた際の、変速ペダルの最大踏み込み量時の走行車体速度MAX1,2で、車体速度が一定に維持されるように、油圧式無段変速機32を制御する、走行制御装置。
(もっと読む)
車両の制御装置
【課題】走行中に[D→N]操作された場合に、高エンジン回転状態が維持されることを回避する。
【解決手段】エンジンと、前進クラッチを有する自動変速機とが搭載された車両において、高エンジン回転の走行中に[D→N]操作されたときには、自動変速機の変速比をハイ側(変速比が小さくなる側)に変更してエンジン回転数を低減する制御を実行する。このような制御により、走行中の[D→N]操作により被駆動状態となっても、前進クラッチの油室の遠心油圧が[遠心油圧<クラッチリターンスプリング力]となるエンジン回転数まで強制的に引き下げることができる。これによって前進クラッチを速やかに開放することが可能となり、高エンジン回転状態が維持されることを回避することができる。
(もっと読む)
走行駆動制御システム
【課題】無段変速装置の変速比を決定する変速操作体を変速操作具の操作量に応じて決定される変速位置への遅れやオーバーシュートを抑えて安定的に変位させる技術。
【解決手段】人為的に操作される変速操作具80の操作量に応じて無段変速装置の変速比を決定する変速操作体と、変速操作体を変位させる変速操作体駆動部22と、予め設定された基準対応関係を用いて変速操作具による操作量から決定された目標変速位置に変速操作体を変位させるための変速制御量を算定する変速制御量算定部52と、変速操作体の実変速位置と目標変速位置との偏差の経時的変動を監視する偏差変動監視部55と、偏差の経時的変動が変曲点を生じた後に、偏差の大きさに応じて変速制御量を過剰制御側に調整する調整処理を実行する変速制御量調整部56とが備えられた走行駆動制御システム。
(もっと読む)
1 - 20 / 95
[ Back to top ]