
Fターム[3J057GA47]の内容
油圧・電磁・流体クラッチ・流体継手 (17,432) | 制御の目的 (2,601) | 変速ショック低減 (160)
Fターム[3J057GA47]に分類される特許
1 - 20 / 160
AMTハイブリッド車両の変速制御方法
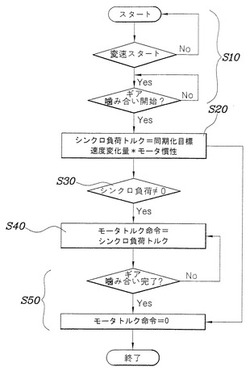
【課題】AMTハイブリッド車両で車速の急激な変化があっても、ギア噛み合いの失敗を防止して、迅速なギア噛み合いで動力断絶状態を最小化して運転性を向上させ、かつ、変速機の耐久性を向上させるAMTハイブリッド車両の変速制御方法を提供する。
【解決手段】変速中に入力軸に連結されたモータの慣性と入力軸の制御目標回転速度の変化を考慮してモータでトルクを発生させ、同期化の崩壊を抑制する能動同期維持段階を含んで構成され、能動同期維持段階は、目標変速段へのギア噛み合いが開始された以後、入力軸の制御目標回転速度の変化量にモータの慣性モーメントを掛けて得られたシンクロ負荷トルクが0ではない場合に遂行し、能動同期維持段階で、モータで発生させるトルクは、シンクロ負荷トルクであることを特徴とする。
(もっと読む)
ハイブリッド車両の駆動装置

【課題】クラッチ係合状態からのダウン変速時における変速ショックの抑制と燃費の向上とを両立させるハイブリッド車両の駆動装置を提供する。
【解決手段】クラッチK0が係合された状態からの自動変速機16のダウン変速に先立って、そのクラッチK0のトルク容量を低減させると共に、電気式制動装置74及び前記電動機MGの少なくとも一方による制動力を変化させるものであることから、電気式制動装置74乃至電動機MGにより変速ショックを低減するための補償制御を実行するのに必要なトルクを、クラッチK0のトルク容量低下分だけ確保することができるため、電動機MGによる回生量の減少を抑制しつつ変速ショックの発生を好適に抑制することができる。
(もっと読む)
自動クラッチ制御装置およびその変速制御方法
【課題】運転者がアクセルを踏込んだ速度に応じて設定される目標クラッチトルクでクラッチを制御することにより運転者の要求する加速の実現が可能である変速機の自動クラッチ制御装置およびその変速制御方法を提供する。
【解決手段】クラッチ40と、目標クラッチトルク演算部3aと、変速制御部3cと、アクセル踏込速度検出部2aと、原動機回転数検出部2cと、入力軸回転数検出部3dと、アクセル踏込速度Vacが1つ以上の所定の踏込速度閾値を超えるか否かを判定する踏込速度閾値判定部3eと、いずれかの踏込速度閾値を超えた場合に入力軸と原動機4とを切離後、成立された低速ギヤ段によって増加している入力軸回転数に一致させるよう原動機回転数Neを増加制御する原動機回転数増加制御部3fと、目標クラッチトルクTcaをアクセル踏込速度Vacの大きさに応じて変更演算する目標クラッチトルク変更演算部3gと、を備える。
(もっと読む)
機械式自動変速装置の制御システム
【課題】本発明は、変速時のショックを低減することのできる機械式自動変速装置の制御システムを提供する。
【解決手段】エンジントルク算出部(31)にて、エンジン(10)の回転速度と吸入空気量と、燃料噴射量とに基づいてエンジントルクTegを算出する。また、回転変化量算出部(32)にて、回転速度変化量aegを算出する。そして、クラッチトルク算出部(33)にて、エンジントルクTegと回転速度変化量aegとエンジン慣性モーメントIegと式(1)に基づいて、クラッチトルクTclを算出する。次に、クラッチストローク算出部(34)にて、クラッチトルクTclとクラッチストロークSclとの関係を示すマップよりクラッチストロークSclを算出し、クラッチ操作部(25)をクラッチストロークSclとなるように作動させる。
(もっと読む)
デュアルクラッチ式変速機の制御方法とデュアルクラッチ式変速機とそれを搭載した車両
【課題】
発進段側のクラッチの負担を低減して、摩耗を抑制することができ、クラッチの交換期間を長くするデュアルクラッチ式変速機の変速装置とデュアルクラッチ式変速機とそれを搭載する車両を提供する。
【解決手段】
第1クラッチC1と結合する第1入力軸11、第2クラッチC2と結合する第2入力軸12、第1入力軸11及び第2入力軸12と、出力軸3との間にそれぞれ奇数段G1、G3、G5と偶数段G2、G4、G6のギア段を一段おきに配置し、
車両を発進するときに、発進段DG2を第2入力軸12に、発進段DG2よりも一段以上高いギア比を有した補助段SG3を第1入力軸11に、それぞれ同期係合させると共に、第1入力軸11に第1クラッチC1を、第2入力軸12に第2クラッチC2をそれぞれ同時に半結合(半クラッチ)させる。
(もっと読む)
車両のDCT制御方法
【課題】DCTを搭載した車両が減速過程で、現在走行中の現在段に比べて低段の目標段への変速を行うとき、入力軸と出力軸の間の関連部品間で発生する衝撃及び騷音の発生を防止する車両のDCT制御方法を提供する。
【解決手段】車両の減速によって先行段(N+1)から現在段(N)及び後行段(N−1)に変速段が徐々に減少する一連の変速が行われるにあたり、先行段(N+1)で締結されていたクラッチを少なくとも後行段(N−1)の変速ギア締結時まで持続的にスリップ制御するスリップ制御段階(S10)を含んでなり、スリップ制御段階(S10)は、車両の減速度に応じてスリップ制御によってクラッチを介して伝達されるトルクの量を制御することを特徴とする。
(もっと読む)
多板式摩擦係合装置および自動変速機
【課題】多板式摩擦係合装置の非係合時の引き摺りを低減させる。
【解決手段】多板式摩擦係合装置を、複数枚の摩擦板70と複数枚のセパレータ72とが軸方向に沿って交互に配列された多板クラッチや多板ブレーキとして構成し、摩擦板70のコアプレート70aを、山部と谷部とが軸中心から放射状に連続するよう波板状に形成し、コアプレート70aに対して周方向に沿って山部には低摩擦係数の摩擦材71aを谷部には高摩擦係数の摩擦材71bをそれぞれ貼り付ける。これにより、コアプレートの山部に高摩擦係数の摩擦材を貼り付け、谷部に低摩擦係数の摩擦材を貼り付けるものに比して、非係合時の引き摺りの発生を低減させることができる。
(もっと読む)
車両用駆動装置
【課題】エンジン再始動に伴う前進クラッチの締結ショックを抑制しつつ、エンジン停止時においてもニュートラル制御を可能とする。
【解決手段】エンジン11と駆動輪19f,19rとの間の動力伝達径路18には、前進時に締結される前進クラッチ48が設けられる。この前進クラッチ48の締結油室63にはバネ部材65が組み込まれ、制御油圧が低下するアイドリングストップ時にも前進クラッチ48はバネ力によって滑り状態または締結状態に保持される。これにより、アイドリングストップ制御のエンジン再始動時に、前進クラッチ48を滑らかに締結することが可能となる。さらに、動力伝達径路18には非通電時に解放される入力クラッチ15が設けられる。これにより、前進クラッチ48を解放する油圧が得られないエンジン停止時にも、イグニッションスイッチのオフ操作によって入力クラッチ15を解放することができ、ニュートラル状態に制御することが可能となる。
(もっと読む)
ハイブリッド車両の制御装置
【課題】WSC走行モードとHEV走行モードが遷移する際の駆動トルクの段差を低減可能なハイブリッド車両の制御装置の提供を図る。
【解決手段】エンジンコントローラ11、モータコントローラ12、第1クラッチ2,第2クラッチ4を統合コントローラ15で作動制御して、EV走行モードとHEV走行モードとWSC走行モードを現出する。WSC走行モードの目標駆動トルクを、HEV走行モードの目標駆動トルクに対して、これら走行モードの切り換えによって生じるオフセットトルク分減算して設定することによって、モード遷移時の駆動トルクの段差が低減される。
(もっと読む)
車両用変速制御装置
【課題】回転数制御からトルク制御への切り換え時に発生するショックを抑制できる車両の変速制御装置を提供する。
【解決手段】動力源と変速機における入出力の回転数差を第1の所定値よりも小さい第2の所定値に制御する回転数制御部と、回転数差が第2の所定値よりも大きく第1の所定値よりも小さい第3の所定値以下の場合に、クラッチのトルク容量を勾配をもって増加させるトルク容量制御部と、回転数差が第3の所定値以下になってトルク容量制御部がクラッチのトルク容量を増加させた時点の値から第4の所定値だけ増加したか否かを判定する増加判定部と、増加判定部で動力源のトルクが第4の所定値だけ増加したと判定された場合に、回転数制御からトルク制御に切り換える切換部と、その切り換え時の動力源の出力トルクをトルク制御の目標値に設定するトルク制御部と、を備える。
(もっと読む)
車両の制御装置
【課題】 クラッチの劣化を抑制しつつ、運転性を向上可能な車両の制御装置を提供すること。
【解決手段】 車両の駆動力を出力するモータと、前記モータと駆動輪との間に介装され指令油圧に基づいて伝達トルク容量を発生するクラッチと、前記クラッチをスリップ制御すると共に、前記クラッチのモータ側の回転数が前記クラッチの駆動輪側の回転数よりも所定量高い回転数となるように前記モータを回転数制御する走行モードと、車両停止状態を判定する車両停止状態判定手段と、前記モータの実トルクを検出するトルク検出手段と、車両停止状態と判定されたときは、前記指令油圧を初期指令油圧から前記モータの実トルクが変化しなくなる油圧である終了指令油圧まで低下させた後、前記初期指令油圧以下であって、かつ、前記終了指令油圧より高い補正後指令油圧に設定する車両停止時伝達トルク容量補正手段と、を備えた。
(もっと読む)
ハイブリッド車両の制御装置
【課題】モータアシスト変速性能の向上を図る。
【解決手段】統合コントローラ20は、モータジェネレータMGの回転数制御に使用可能とするMGトルクについてトルク制限値Tlimitにより制限を掛けている。ここで、トルク制限値Tlimitは、第2クラッチCL2が締結している場合、第1制限値T1に設定され、第2クラッチCL2がスリップ状態である場合、回転変化に必要な補正トルクである第2制限値T2と第1制限値T1との加算値に設定される。
(もっと読む)
車両の制御装置
【課題】モータを駆動力として走行する車両における変速時のショックの発生を防止する。
【解決手段】本発明は、駆動源としてのモータと、モータと駆動輪との間に介装される変速機と、モータから駆動輪までの動力伝達経路上に配置されるクラッチと、モータの駆動力によって走行中、クラッチの伝達トルク容量を低下させてクラッチを締結状態からスリップ締結状態へと移行させ、スリップ締結状態を保持するクラッチ制御手段と、クラッチ制御手段によってクラッチがスリップ締結状態に保持されている状態で変速機の変速が開始された時(S2)、クラッチの伝達トルク容量を増大させてクラッチを締結状態へと移行させる(S4、S7)変速時クラッチ制御手段と、を備える車両の制御装置である。
(もっと読む)
ハイブリッド車両の制御装置
【課題】WSC走行モードからHEV走行モードへのモード遷移時に、摩擦要素の入力回転数の吹け上がりを抑制することができるハイブリッド車両の制御装置を提供すること。
【解決手段】本発明のハイブリッド車両の制御装置は、摩擦要素(第2クラッチ)CL2をスリップ締結し、摩擦要素CL2を介して伝達される駆動力で走行するエンジン使用スリップ走行モード(WSC走行モード)から、エンジンEngとモータMGの両方の駆動力で走行するハイブリッド車走行モード(HEV走行モード)へモード遷移を行う際、目標駆動トルク制御手段(第2フィルタ処理部)203によって、要求駆動トルクの変化に対して、目標駆動トルクの変化を制限するトルク制限制御を行う。
(もっと読む)
ハイブリッド車両の制御装置
【課題】 適切な走行シーンにおいて第1クラッチの学習補正を行うことが可能なハイブリッド車両の制御装置を提供すること。
【解決手段】 第2クラッチをスリップ制御してモータを回転数制御しているときに、第1クラッチの締結・開放が行われる走行モードの遷移であっても、第1クラッチの締結・開放以外の要因でモータトルク変動が生じる場合には、第1クラッチの学習補正を禁止することとした。
(もっと読む)
制御装置
【課題】内燃機関の停止状態から内燃機関を始動して車両を加速させる際のショックを抑制することができる制御装置を実現する。
【解決手段】内燃機関11に対してトルク制御の実行を指令するとともに摩擦係合装置CSの伝達トルク容量を入力軸Iの回転速度に基づき設定して加速させる通常加速制御を実行する通常加速制御部50と、通常回転速度導出部51と、内燃機関11に対して始動を指令するとともに内燃機関11の始動後に入力部材Iの回転速度を通常回転速度に近づけるための制御を行い、更に摩擦係合装置CSの伝達トルク容量を要求トルクに応じた容量に設定して加速させる特定加速制御を実行する特定加速制御部52と、加速制御決定部54と、特定加速制御の実行中に過回転状態から通常回転状態になったと判定された場合に特定加速制御から通常加速制御に切り替える加速制御切替部55とを備える。
(もっと読む)
制御装置
【課題】出力部材の回転速度の検出精度が低下する低い回転速度域でも、入出力間摩擦係合要素を係合させる場合に、トルクショックが生じることを抑制できる制御装置の実現。
【解決手段】少なくとも回転電機を有する駆動力源に駆動連結される入力部材と、車輪に駆動連結される出力部材と、入力部材と出力部材とを選択的に駆動連結させる入出力間摩擦係合要素と、を備えた車両用駆動装置の制御装置であって、入出力間摩擦係合要素を滑らせてトルクを伝達させつつ、車両を走行させるスリップ走行モードの実行中に、回転速度制御による回転電機の出力トルクの負方向への変化量が所定値以上となった際に完全係合条件が成立したと判定して、入出力間摩擦係合要素の係合圧を、滑りのない係合状態を維持できる係合圧である完全係合圧まで増加させる制御装置。
(もっと読む)
クラッチ制御装置
【課題】アクチュエータを用いてクラッチのレリーズ動作を行うクラッチ制御装置において、クラッチディスクの摩耗によるタッチポイントの位置変化を検知して、クラッチの断接及び伝達トルクの制御を適切に行う。
【解決手段】クラッチ制御装置40は、モータ42と、モータ42によって作動され、初期位置から切断位置に前進することでクラッチ10を接続状態から切断状態とし、切断位置から初期位置へ後退することでクラッチ10を接続状態とするカム44と、カム44の変位をレリーズフォーク36に伝達するローラ56と、カム44を退避位置に後退させた後に前進させ、ローラ56を介してクラッチレリーズ機構30に荷重を開始した位置をカムの初期位置に設定し、設定した初期位置に基づいてクラッチ10の断接及び伝達トルクの制御を適切に行うECU60とを備える。
(もっと読む)
惰行制御装置
【課題】惰行制御終了時の変速による空走の時間を短くし、ドライバーの違和感を低減することが可能な惰行制御装置を提供する。
【解決手段】車両の走行中にエンジンが外部に対して仕事をしないときに、クラッチを断にすると共に、エンジン回転数を所定回転数に落とす惰行制御を行う惰行制御装置において、惰行制御中に、当該惰行制御が終了するときのアクセル開度と車両速度を予測し、惰行制御中に予測したアクセル開度と車両速度に応じたギアに変速する惰行制御時変速手段6を備えたものである。
(もっと読む)
自動変速機制御装置及びクラッチの断接状態の検出方法
【課題】新たにセンサを追加することなく、また、複雑な演算処理を必要としないでクラッチの断接状態を正確に検出することができる自動変速機制御装置及びクラッチの断接状態の検出方法を提供する。
【解決手段】電磁液圧制御弁の電磁ソレノイドへの通電量の制御によって自動変速機のクラッチシリンダに供給する作動液圧を調節する自動変速機制御装置において、クラッチシリンダに供給される作動液圧の値を検出するための圧力センサと、検出される作動液圧が指示圧力となるように電磁ソレノイドの通電制御を行う液圧制御弁制御手段と、電磁ソレノイドの通電制御に用いられるパラメータの急激な変化に基づいてクラッチの断接状態を判定するクラッチ断接判定手段と、を備える。
(もっと読む)
1 - 20 / 160
[ Back to top ]