
Fターム[3J057GE06]の内容
油圧・電磁・流体クラッチ・流体継手 (17,432) | 電気回路による制御 (521) | デジタル制御 (216)
Fターム[3J057GE06]の下位に属するFターム
プログラム制御又はマイコン制御 (164)
デューティ比制御 (14)
Fターム[3J057GE06]に分類される特許
1 - 20 / 38
クラッチすべり抑制制御装置
【課題】小型で省消費電力で結合時のすべりを解消し、結合力を高めることができる電磁クラッチのすべり抑制制御装置を提供する。
【解決手段】クラッチすべり抑制制御装置は、Hブリッジ型の電気回路により電磁クラッチに対して結合及び解放のいずれの方向にも電流を印加可能な電流印加手段と、エンジンとエアコンプレッサとのトルク差から電磁クラッチの滑りを予測する予測手段と、エンジンとエアコンプレッサとの回転数差から必要な電磁クラッチの結合力を推定する結合力推定手段と、推定された結合力から電磁クラッチの結合に最適な電流値を算出する電流値算出手段と、算出された最適な電流値でデューティ比を変化させる変化手段とを有し、予測手段が電磁クラッチの滑りを予測した場合に、変化手段はデューティ比をエンジンとモータジェネレータとの間の結合力を強めるように変更する。
(もっと読む)
車両の走行制御装置

【課題】惰性走行を実施する頻度を増やし燃費を向上させることができるようにした車両の走行制御装置を提供する。
【解決手段】
エンジン1と、エンジン1と駆動輪7の間に介装された動力断接手段2と、惰性走行開始条件が成立したら動力断接手段2を動力遮断状態に制御し惰性走行を開始する惰性走行制御手段130とを備え、惰性走行開始条件には、車両の走行路が下り坂又は所定条件を満たす上り坂であることが含まれ、惰性走行制御手段130は、車両の前方に上り坂の頂上があるか否かを判定する頂上判定手段124と頂上判定手段124により頂上があることが判定されると車両が惰性走行を開始した場合の車両の走行速度の変化を推定して惰性走行によって車両が頂上に到達した際の走行速度Vが下限速度Vlow以上となることを所定条件として惰性走行の開始を判定する惰性走行開始判定手段125とを有する。
(もっと読む)
車両の動力伝達制御装置
【課題】HV−MT車にて、実際のクラッチトルク特性の変化によってクラッチ操作部材の操作に対する「駆動輪に伝達される駆動トルク」の推移に変化が発生することの抑制。
【解決手段】この動力伝達制御装置は、動力源として内燃機関(EG)とモータ(MG)とを備えたハイブリッド車両に適用され、手動変速機と、摩擦クラッチとを備える。クラッチトルク基準特性(マップ)にクラッチ戻しストローク検出値を適用してクラッチトルク基準値が決定される。このクラッチトルク基準値と「EGの出力軸の駆動トルク検出値」とのうちで小さい方の値が「CT通過後基準EGトルク」として決定される。MGトルクは、CT通過後基準EGトルクから、M/Tの入力軸の駆動トルク検出値(CT通過後実EGトルク)を減じた値に調整される。これにより、CT通過後EGトルクの誤差が補償され得る。
(もっと読む)
車両、特にハイブリッド自動車車両の車軸に対する電気機械の連結解除方法およびシステム
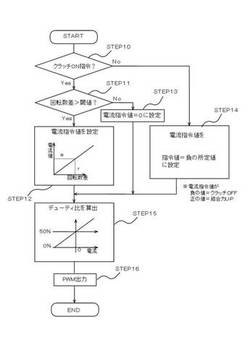
噛合い爪(51、52)によって車両の車軸の車輪(44)と連結された電気機械(42)を連結解除するため、本方法は、連結解除要求が出された後、順次起動される2つのステップ、すなわち、電気機械(42)のトルクによる第1の制御ステップであって、両噛合い爪(51、52)の間の作用トルクがゼロの状態を得るために目標トルク較正閾値(d)に等しいトルク指令を前記電気機械(42)に加えるステップと、電気機械(42)のトルクによる第2の制御ステップであって、前記目標トルク較正閾値(d)に始まって値ゼロで終わる勾配に沿ったトルク指令を電気機械(42)に加えるステップとを含む。  (もっと読む)
(もっと読む)
排水ポンプ装置
【課題】従来より、原動機からの動力をポンプ本体に断接可能に伝達する機械式のクラッチを有する減速機と、該減速機内で前記クラッチを含む潤滑部に供給する潤滑油を冷却するためのオイルクーラとを備えた排水ポンプ装置では、この比較的低温の潤滑油による高い潤滑効果のためにクラッチの嵌入時間が長くなり、出水状況に応じた迅速なクラッチ接続ができない、という問題があった。
【解決手段】オイルクーラ5を経由して潤滑油を供給する第一油路60、またはオイルクーラ5を経由せず潤滑部67に潤滑油を直接供給する第二油路61を選択可能な油路切換機構58を設けると共に、前記クラッチ4の接続動作が完了した後のクラッチ接続中にのみ、前記油路切換機構58によって第一油路60を選択する油路切換制御構成とした。
(もっと読む)
車両用自動変速機の制御装置
【課題】無段変速機構の入力プーリ及び出力プーリを回転可能に支持する軸受の潤滑状態を良好に保つことのできる車両用自動変速機の制御装置を提供する。
【解決手段】この車両用自動変速機の制御装置は、内燃機関1から駆動力が入力される入力プーリ41と、同入力プーリ41の回転力がベルト31を介して伝達される出力プーリ51と、これら入力プーリ41及び出力プーリ51をそれぞれ回転可能に支持する軸受34〜37とを備える無段変速機構30と、クランクシャフト11により駆動されて軸受34〜37にオイルを供給するオイルポンプ62とを備える。そして、オイルポンプ62から各軸受34〜37に供給されるオイルの量が不足する状態にあるか否かを判定し、加速要求がなく且つオイルの量が不足する旨判定されるときには入力プーリ41に伝達される入力駆動力を制限する処理を実行する。
(もっと読む)
エンジン自動停止始動システム
【課題】エンジンの自動停止状態からの再始動時における始動性の向上を図る。
【解決手段】エンジン10と変速機13との間にはドライバによる操作に応じて動力の遮断及び伝達を行うクラッチ装置12が設けられている。ECU30は、エンジン運転中に所定の停止条件が成立した場合にエンジン10を自動停止させるとともに、そのエンジン停止後に所定の再始動条件が成立した場合にエンジン10を再始動させる。ECU30は、エンジン10の再始動開始からの経過時間を算出する。また、クラッチ継合状態となる以前の所定時点で、前記算出した経過時間に基づいて、クラッチ装置12における切替動作の遅延制御を実施する。
(もっと読む)
車両の動力伝達装置
【課題】電流を無駄に消費することなく、主駆動輪から従駆動輪への伝達トルクを適切に制御可能な電子制御カップリングを備えた車両の動力伝達装置を提供する。
【解決手段】ECUは、前後輪の差動回転数に基づいてカム機構に生じるカム角度CAを演算するとともに(S100)、カム角度に応じて伝達可能トルク値を推定する(S110)。そして、ECUは、トータル駆動トルクに対する車両状況に応じた適切な駆動力配分が実現されるように伝達トルク指令値Tqcomの通常値を演算する(S120)。さらに、ECUは、カム間の捩れ量が小さく伝達トルクを大きくできない状態と判断した場合(S130のYES判定時)には、伝達トルク指令値を通常値よりも低下させることによって、電子制御カップリングでのトルク伝達に寄与しない無駄な消費電力を削減する。
(もっと読む)
クラッチ制御装置およびそれを備えた車両
【課題】利便性の向上が図られたクラッチ制御装置およびそれを備えた車両を提供する。
【解決手段】クラッチ制御装置50は、エンジンと、駆動部と従動部とを有するクラッチと、前記クラッチを断続させるアクチュエータ67と、アクチュエータ67を制御するアクチュエータ制御部93と、前記駆動部と前記従動部との間の回転速度差を検出する回転速度差検出部91と、前記クラッチが接続された状態において回転速度差検出部91により検出される回転速度差が所定の回転速度差以上であるとき、アクチュエータ制御部93によるアクチュエータ67の制御を停止させる制御停止部94と、制御停止部94によってアクチュエータ67の制御が停止された後、回転速度差検出部91により検出される回転速度差が所定の回転速度差未満になると、アクチュエータ制御部93によるアクチュエータ67の制御を再開させる制御再開部95と、を備えている。
(もっと読む)
自動化車両マスタークラッチの解放を制御する方法及び装置
本発明は、車両の推進装置(2)と段階ギヤ式トランスミッション(4)の間の車両の動力伝達装置(1,21)内に配設された自動化車両マスタークラッチ(3,23)の解放を制御する方法及び装置であって、前記方法は、マスタークラッチ解放手順の開始に先立って、前記推進装置の第1出力トルク(T0)を決定するステップと、少なくとも前記第1出力トルク(T0)に応じて、前記第1出力トルクよりもゼロトルクに近い、前記推進装置の第2出力トルク(T1)を計算するステップと、急に前記推進装置の出力トルクを前記第1出力トルクから前記第2出力トルクに変更することによって、前記動力伝達装置の駆動軸(8,28)内で振動を開始することにより前記マスタークラッチ解放手順を開始するステップと、前記振動が第1振動転換点に達した時に前記マスタークラッチを解放するステップとを含む。本発明によれば迅速なギヤシフトと車両の快適さとトランスミッションの耐久性が維持される。 (もっと読む)
クラッチの制御装置
【課題】車両の減速中において最適な伝達トルクを実現する。
【解決手段】車両が減速中であると、クラッチの伝達トルクがスタンバイトルクまで減少するように制御される。スタンバイトルクは、エンジンのフリクショントルクによるクラッチの滑りが生じないように定められる。すなわち、エンジンのフリクショントルクによるクラッチの滑りが生じない範囲内で、クラッチの伝達トルクが減少される。
(もっと読む)
クラッチの制御装置
【課題】クラッチを係合させる際に、モータの回転が停止または急減速した場合であっても、モータトルクを高精度に制御してクラッチの係合力を高精度に制御することができるとともに、構成の安価なクラッチの制御装置を得る。
【解決手段】演算されたモータ9の回転数が所定回転数以上の場合には、モータ9の回転に応じて検出される第1モータ電流に基づいてモータ9の駆動信号が生成され、所定回転数未満の場合には、所定周期毎に検出される第2モータ電流に基づいて駆動信号が生成されるクラッチの制御装置であって、モータ9の回転数またはモータ9の回転角度に基づいて、モータ9の急減速状態を判定する急減速状態判定手段28と、モータ9の急減速状態が判定された場合に、モータ9の回転数が所定回転数以上でも、駆動信号を生成するためのモータ電流として第2モータ電流を選択するモータ電流選択手段29とを備えている。
(もっと読む)
産業用車両の油圧クラッチ制御方法と制御装置
【課題】 油圧クラッチへの充填完了を更に精度良く検出することができる産業用車両の油圧クラッチ制御方法を提供すること。
【解決手段】 油圧クラッチの係合時に、調圧した低圧の作動油をこの油圧クラッチに供給し、この油圧クラッチへ供給する作動油の最低圧力に圧力計測基点Tを設定し、この設定した圧力計測基点T以降の作動油圧力の上昇量Ptを検出して、この検出した圧力の上昇量Ptが所定の上昇量に達すると作動油の充填完了と判定して該油圧クラッチに供給する作動油の圧力を上昇させて、油圧クラッチの係合時における衝撃を抑える。
(もっと読む)
駆動系制御装置
【課題】トランスファクラッチの締結開始点に対応する制御信号を学習する。
【解決手段】前輪出力軸には駆動力が直接的に伝達され、後輪出力軸には駆動力がトランスファクラッチを介して分配される。このトランスファクラッチはデューティ制御弁によって調圧された作動油が供給される油圧クラッチである。旋回走行状態のもとで後輪出力軸回転数Nrの振動が検出されると(符号α2)、デューティ比Rdの引き下げが開始される(符号β2)。そして、デューティ比Rdを引き下げることにより、後輪出力軸回転数Nrに現れていた振動が消滅すると(符号γ2)、制御ユニットはそのときのデューティ比Rd(符号δ2)を、トランスファクラッチの締結開始点に対応する制御信号のデューティ比Rdとして学習する。これにより、トランスファクラッチを高精度に制御することができるとともに、前後輪のトルク分配比を高精度に制御することが可能となる。
(もっと読む)
自動変速装置の制御装置及び制御方法
【課題】モータによって変速制御を行う自動変速装置において、変速時の変速区間毎に最適なクラッチ制御を行うとともに、走行時フィーリングと燃費の向上を行う自動変速装置の制御装置及び制御方法を提供する。
【解決手段】クラッチ制御手段107の制御操作を実行するモータの出力制御を行うモータ制御手段201とを備え、モータ制御手段201は、所望の運転状態に対応して目標モータ電流を演算する目標モータ電流演算手段209と、複数の検出タイミングに対応した複数のモータ電流を検出するモータ電流検出手段207,208と、検出された複数のモータ電流から前記所望の運転状態に対応したモータ電流を選択する選択手段と、前記目標モータ電流と前記選択されたモータ電流の差に応じて前記モータの出力をフィードバック制御するモータ駆動手段203とを備えている。
(もっと読む)
押圧装置
【課題】押圧体に対する相対位置を適正化することのできる押圧装置を提供する。
【解決手段】直線的に前後動作するアクチュエータに連結されている保持体に、所定の対象物に当接して該対象物を押圧する押圧体が前後動可能に保持されるとともに、前記保持体が前進して前記押圧体が前記対象物によって相対的に押し戻された場合に前記押圧体の前記保持体に対する相対的な後退移動を規制する一体化機構が設けられ、さらに前記保持体が後退移動した場合に前記押圧体を前記保持体に対して相対的に前進方向に押圧する推進機構が設けられた押圧装置において、前記押圧体を前記対象物に当接させて相対的に後退移動させた前記保持体が前記対象物から離隔する方向に後退した場合に、前記推進機構による前記押圧体の前進方向への移動を規制する規制手段を備えていることを特徴とする。
(もっと読む)
車両の前後進クラッチ制御装置
【課題】部品の寸法差や操作方法の差による影響を受けることなく、ペダル操作によるフィーリングの良い発進操作が常に安定して可能となる前後進クラッチ制御装置を提供する。
【解決手段】前後進クラッチ制御装置は、クラッチペダルOの操作角検出結果に基づいて、前進クラッチ又は後進クラッチ35a,35bの送油圧を制御可能に構成し、前記クラッチペダルOを踏み込んで前進クラッチと後進クラッチ35a,35bとを共に遮断した状態からクラッチペダルOの復帰操作の初期には、前記前進クラッチまたは後進クラッチ35a,35bのクラッチ板Sがミートする位置までクラッチピストンRをすばやく移動させるように所定の定圧で送油し、この送油中の圧力が設定圧力以上に達したときに、前記定圧での送油を中止して、クラッチペダルOの操作角度に応じて変更される圧力での送油に切り換えるように連繋するものである。
(もっと読む)
発進クラッチの制御方法及び制御装置
【課題】発進クラッチがクリープ制御されている間、ピストンの押圧力を可変制御することにより、発進クラッチの押圧力を大きくすることで車両に伝達するトルクを増大させ、傾斜や段差があってもブレーキ操作のみで駐車が可能となり、路面状態に応じたクリープ力で、運転者の要求にあった車の制御ができる発進クラッチの制御方法及び制御装置を提供する。
【解決手段】車両のトランスミッションとエンジンとの間に配置され、動力を伝達する湿式多板クラッチと、湿式多板クラッチを係合させるために押圧するピストンとを備えた発進クラッチの制御方法であって、発進クラッチがクリープ制御されている間、ピストンの押圧力を可変制御する。
(もっと読む)
車両の制御装置
【課題】ストローク量に応じたトルクを駆動源から変速機に伝達するクラッチ機構と、ストローク量を制御するアクチュエータとを備えた車両において、クラッチ機構による伝達トルクを適切に制御する。
【解決手段】ECUは、ストロークセンサからのストローク量SXを検出するステップ(S200)と、エンジンに起因する振動に応じた波形の特性値として学習した振幅Bがしきい値より大きいと(S202にてYES)、エンジンに起因する振動に応じた波形の特性値として学習した位相基準タイミングAから算出した経過時間TAおよび振幅Bに基づいて、エンジンに起因する振動に応じた波形Cを算出するステップ(S206)と、波形Cの逆位相の波形Dを算出するステップ(S208)と、波形Dの値をストローク量SXに合成するステップ(S210)とを含む、プログラムを実行する。
(もっと読む)
変速制御装置、鞍乗型車両、及び変速機の制御方法
【課題】変速によって搭乗者の予想を超える減速や加速が生じることを抑制し、車両の乗り心地を向上する。
【解決手段】変速制御装置は、クラッチの駆動側部材から、当該クラッチの被駆動側部材に伝達されている現在トルクを算出するとともに、駆動側部材から被駆動側部材に、クラッチの接続が完了した後に伝達されると推定される完了後トルクを算出する。そして、変速制御装置は、現在トルクと完了後トルクとの差に応じてクラッチの接続度合を制御し、現在トルクと完了後トルクとの差に応じて次の変速指示を受け付ける。
(もっと読む)
1 - 20 / 38
[ Back to top ]