
Fターム[3J057GE07]の内容
油圧・電磁・流体クラッチ・流体継手 (17,432) | 電気回路による制御 (521) | デジタル制御 (216) | プログラム制御又はマイコン制御 (164)
Fターム[3J057GE07]に分類される特許
1 - 20 / 164
車両用デュアルクラッチ式変速機
【課題】車両の一時停止時から発進時にかけての摩擦クラッチの放熱特性を改善して温度上昇を抑制するコスト低廉な車両用デュアルクラッチ式変速機を提供する。
【解決手段】駆動側プレート25を共有する第1摩擦クラッチ21及び第2摩擦クラッチ22と、第1摩擦クラッチ21に回転連結される第1変速機構と、第2摩擦クラッチ22に回転連結される第2変速機構と、車両の発進に際して継合動作する一方のクラッチ21の温度を実測または推測するクラッチ温度検出手段と、制御部とを備え、前記制御部は、車両走行途中の一時停止時に実測または推測した一方のクラッチ21の温度を規定値と比較して高温状態を判定する高温判定手段と、一方のクラッチ21が高温状態のときに、他方のクラッチ22に回転連結される第2変速機構をニュートラル状態とし、一時停止時から車両発進まで他方のクラッチ22の継合状態を継続する放熱促進手段と、を有する。
(もっと読む)
自動クラッチ制御装置およびその変速制御方法

【課題】運転者がアクセルを踏込んだ速度に応じて設定される目標クラッチトルクでクラッチを制御することにより運転者の要求する加速の実現が可能である変速機の自動クラッチ制御装置およびその変速制御方法を提供する。
【解決手段】クラッチ40と、目標クラッチトルク演算部3aと、変速制御部3cと、アクセル踏込速度検出部2aと、原動機回転数検出部2cと、入力軸回転数検出部3dと、アクセル踏込速度Vacが1つ以上の所定の踏込速度閾値を超えるか否かを判定する踏込速度閾値判定部3eと、いずれかの踏込速度閾値を超えた場合に入力軸と原動機4とを切離後、成立された低速ギヤ段によって増加している入力軸回転数に一致させるよう原動機回転数Neを増加制御する原動機回転数増加制御部3fと、目標クラッチトルクTcaをアクセル踏込速度Vacの大きさに応じて変更演算する目標クラッチトルク変更演算部3gと、を備える。
(もっと読む)
車両駆動装置
【課題】車両発進時に摩擦クラッチの仕事量を制限することによって熱エネルギの発生を抑制し、摩擦クラッチの耐久性能を従来よりも向上した車両駆動装置を提供する。
【解決手段】エンジン2と、駆動側部材61、従動側部材62、及びアクチュエータ63を有する摩擦クラッチ6と、エンジン2の出力回転数の目標値を設定して実際の出力回転数が一致するようにエンジン2を制御し、かつ摩擦クラッチ6のアクチュエータ63を制御する制御部7と、を備える車両駆動装置1であって、摩擦クラッチ6の温度を実測または推測するクラッチ温度検出手段(吸気温度センサ5)をさらに備え、制御部7は、車両発進時のアクセルペダルの操作量及び摩擦クラッチ6の温度に基づいて出力回転数の目標値を設定する発進時制御手段71を有する。
(もっと読む)
摩擦クラッチ装置
【課題】クラッチ継合動作不良が発生したときの原因をアクチュエータの故障または摩耗追従機構の故障のどちらかに判別して、動作不良の原因究明及び故障個所の修理を効率的に実施できるようにした摩擦クラッチ装置を提供する。
【解決手段】駆動側プレート2と、摩擦材31、32を有する従動側プレート3と、従動側プレート3を押動するプレッシャプレート4と、プレッシャプレート4を駆動するアクチュエータ4と、プレッシャプレート4の移動ストローク量を検出するストローク検出手段6と、従動側プレート3の摩擦材31、32の摩耗量に応じて駆動側プレート2とプレッシャプレート4との間の間隙長dを調整する摩耗追従機構7と、クラッチ継合動作不良が発生したときに、移動ストローク量の変化に基づいて動作不良の原因をアクチュエータ5の故障または摩耗追従機構7の故障のどちらかに判別する故障判別手段81と、を備える。
(もっと読む)
車両用クラッチ制御装置
【課題】クラッチなどが過度に昇温した場合、駆動力の低下を回避すると共に、運転者に予期しない違和感を与えることがないようにした車両用クラッチ制御装置を提供する。
【解決手段】エンジンの出力を変速機に伝達する機械式摩擦クラッチとクラッチを開閉方向または締結方向に駆動するアクチュエータの少なくともいずれかが温度上昇を抑制すべき温度上昇抑制制御を必要とするか否か判断し、温度上昇抑制制御が必要と判断されるとき、目標クラッチ容量が所定値以上か否か判定し(S102)、所定値以上と判定されるときは運転者のクラッチペダル操作に所定時間内に追従するようにアクチュエータの動作を制御する一方、所定値以上ではないと判定されるときは運転者のクラッチペダル操作に所定時間より長い時間内に追従するように目標クラッチ容量を補正する(S104)。
(もっと読む)
ハイブリッド車両のクラッチ制御装置
【課題】クラッチの切断保持が所定時間継続された場合には、クラッチ装置を一時的に係合させ、クラッチトルク制御精度を確保できるようにしたハイブリッド車両のクラッチ制御装置を提供する。
【解決手段】エンジン11と、自動変速装置13と、クラッチ装置14とを備えるとともに、アクチュエータ61によってストロークされる出力ロッド64、及び出力ロッドのストロークに応じて作動され、リザーバ69に連通するアイドルポート70を閉止して油圧を発生するマスタシリンダ65を含むクラッチアクチュエータ48と、マスタシリンダ65と連通路68を介して連通され、マスタシリンダ65が発生する油圧に応じて作動され、クラッチ装置14を切断および係合制御するスレーブシリンダ47と、モータ12による走行時にクラッチ装置14の切断状態が所定時間継続された場合に、アイドルポート70を開放する方向にマスタシリンダ65を作動してクラッチ装置14を一時的に係合保持するクラッチ係合保持制御手段とを有する。
(もっと読む)
内燃機関の制御装置
【課題】締結状態と開放状態の2つの状態をON/OFF的に切り替える電磁クラッチを用いて、当該電磁クラッチを締結する際のトルク段差に起因するショックを緩和できるようにした内燃機関の制御装置を提供する。
【解決手段】車両の駆動輪に内燃機関1からの駆動力が伝達されている第2の状態であれば、運転者の加速要求が大きいか否かを判定し(S15)、運転者の加速要求が大きい場合には電磁クラッチ23を締結する。運転者の加速要求が小さい場合には、運転者の加速要求が速いか否かを判定し(S16)、運転者の加速要求が速い場合には、余裕トルクTsが電磁クラッチ23を締結した際に生じるイナーシャ変化に伴う内燃機関1の出力トルクの減少量よりも大きいと判定(S17)されると、電磁クラッチ23を締結する。
(もっと読む)
噛み合い式係合装置
【課題】解放時に噛み合い部材の位相を調整する電動機のトルクを噛み合い部材の解放後に要求されるトルクに滑らかに変化させることが可能な噛み合い式係合装置を提供する。
【解決手段】ハブ41とブレーキ部材43との係合及び解放をアクチュエータ44によって行うドグクラッチ40において、ハブ41に動力が伝達される第1MG200にドグクラッチ40を解放状態に切り替えるために要求する解放前要求トルクを算出するとともに、ドグクラッチ40を係合状態から解放状態に切り替える際はハブ41が揺動されるように第1MG200のトルクの増加及び減少を行う揺さ振り制御を実行し、この揺さ振り制御の実行時には第1MG200のトルクをドグクラッチ40が解放状態に切り替わった後に第1MG200に要求される解放後要求トルクに近付ける方向に最初に変更する。
(もっと読む)
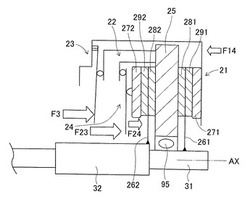
ダブルクラッチ変速機のクラッチ操作装置
【課題】常に安定したクラッチ結合がなされる摩耗補償機能を有し、電源が遮断された場合には、自動的にクラッチが解除できる機能を併せ持つダブルクラッチ変速機のクラッチ操作装置を提供する。
【解決手段】本発明は、直線移動し、クラッチを結合させる作動ストロークを形成する作動ロッドと、回転力を発生させる電動手段と、電動手段の回転力を、作動ロッドの直線移動力に切り換える直線切り換え手段と、作動ロッドがクラッチを結合させる状態と解除させる状態とにより、作動ロッドの直線移動力を増大させる状態と増大した直線移動力を解除させる状態とを形成する補助力供給手段と、直線切り換え手段に対する作動ロッドの相対的な位置を変化させるロッド位置調節手段と、直線切り換え手段と補助力供給手段を内部に具備し、作動ロッドの一部を外部に突出するように覆いながら形成されたハウジングと、を含んで構成されることを特徴とする。
(もっと読む)
車両用摩擦クラッチの制御装置
【課題】摩擦クラッチの制御時において基準となるクランプ点を精度良く求めることができる車両用摩擦クラッチの制御装置を提供する。
【解決手段】自動クラッチ14のクラッチ温度thcが安定していると判断される場合、そのときに学習されたクランプ点clampsを基準値として補正下限基準値clampminおよび補正上限基準値clampmaxが設定される。このようにすれば、クラッチ温度thcが安定している時に学習されたクランプ点clampsを基準値として、補正時においてクランプ点clampの取りうる値の範囲を規定する補正下限基準値clampminおよび補正上限基準値clampmaxが設定されるため、クランプ点clampの過補正が防止され、自動クラッチ14において発熱および放熱が繰り返された際に発生するクランプ点clampの発散を防止することができる。
(もっと読む)
ハイブリッド車両の制御装置
【課題】 バッテリSOCの高低に関わらず、MWSC走行モードからWSC走行モードへ移行することができるハイブリッド車両の制御装置を提供すること。
【解決手段】 モータスリップ走行制御とエンジン使用スリップ走行制御とを切り換えるときに、目標駆動トルクが大きいほど、モータジェネレータの回転数上昇の変化率を高く設定するようにした。
(もっと読む)
ハイブリッド車両の制御装置
【課題】駆動輪のスリップ可能状態を検出したとき、モータと駆動輪の間に介装した第2摩擦要素のスリップ状態を維持することができるハイブリッド車両の制御装置を提供する。
【解決手段】本発明のハイブリッド車両の制御装置は、スリップ検出手段(ステップS1)により駆動輪7,7のスリップ可能状態が検出されたとき、第1摩擦要素4を開放すると共に第2摩擦要素5をスリップ締結し、第2摩擦要素5を介して伝達される駆動力で走行する「MWSCモード」を禁止し、第1摩擦要素4を締結すると共に第2摩擦要素5をスリップ締結し、第2摩擦要素5を介して伝達される駆動力で走行する「WSCモード」に設定する。
(もっと読む)
車両用制御装置
【課題】摩擦締結要素を保護するための保護制御が行われ易い状態にあることを、ドライバに対して、適切に告知することのできる車両用制御装置を提供すること。
【解決手段】動力源10,20と駆動輪54との間に介装され、前記動力源と前記駆動輪とを断接する摩擦締結要素25を備える車両に対して制御信号を出力する車両用制御装置であって、前記摩擦締結要素の温度を検出する温度検出手段64と、前記摩擦締結要素の締結トルクを制御する締結トルク制御手段と、前記摩擦締結要素の温度が所定の第1温度以上である場合に、前記締結トルク制御手段を制御し、前記摩擦締結要素の前記締結トルクを、所定の周期で繰り返し変化させるトルク振動制御を行うトルク振動制御手段と、を備えることを特徴とする車両用制御装置を提供する。
(もっと読む)
ハイブリッド車両の制御装置
【課題】 車両負荷が大きいときに第2クラッチの過剰な発熱を抑制可能なハイブリッド車両の制御装置を提供すること。
【解決手段】 エンジンとモータの間に第1クラッチを有し、モータと駆動輪の間に第2クラッチを有するハイブリッド車両において、車両負荷が所定値以上のときは、エンジンを作動させた状態で第1クラッチを解放し、モータをエンジン回転数よりも低い回転数として第2クラッチをスリップ締結することとした。
(もっと読む)
クラッチ制御装置および車両
【課題】自動クラッチ装置の制御を行うクラッチ制御装置において、ユーザーの指向に応じて、発進時やシフトチェンジ時の応答性を調整可能とする。
【解決手段】ECU(エンジン制御装置)のEEPROMには、3種類の走行モード(標準モード、機敏モード、緩やかモード)のそれぞれに対応する規定マップが記憶されている。各規定マップは、クラッチ回転数差と目標クラッチ位置との関係を規定している。ユーザーの指向に応じていずれかの走行モードが選択されると、当該走行モードに応じて目標クラッチ位置が一律に変更される。
(もっと読む)
車両のクリープトルク制御装置
【課題】車両に作用する制動力に応じて的確に且つ応答性よくクリープトルクを制御でき、もって燃料消費の低減やクラッチの消耗抑制を十分に達成できる車両のクリープトルク制御装置を提供する。
【解決手段】クラッチ回転速度Ncの増加に伴って目標クリープトルクを低下させ、且つブレーキ液圧の増加に伴って目標クリープトルクを低下させる通常時クリープトルク特性A〜Dをマップとして予め記憶させる。そして、このマップに基づきクラッチ回転速度Nc及びブレーキ液圧から目標クリープトルクを算出することで、クラッチ回転速度Ncやブレーキ液圧が変化したときに直ちに目標クリープトルクを増減させてクラッチの半クラッチ制御に反映させる。
(もっと読む)
惰行制御装置
【課題】車両振動の影響による惰行制御の終了を防止できる惰行制御装置を提供する。
【解決手段】惰行制御判定マップ2へのクラッチ回転数とアクセル開度のプロット点が惰行制御可能領域内にあって、アクセルペダル操作速度が所定範囲内にて、かつクラッチ回転数とアクセル開度のプロット点が惰行制御しきい線をアクセル開度減少方向に通過したとき、クラッチを断すると共にエンジン回転数を低下させて惰行制御を開始し、アクセルペダル操作速度が所定範囲外となったか又はプロット点が惰行制御可能領域外に出たとき惰行制御を終了する惰行制御実行部3と、アクセルペダル操作加速度が車両振動判定値範囲外のときには、惰行制御実行部3による惰行制御開始・終了の判定を無効とし、アクセルペダル操作加速度が車両振動判定値範囲内のときは、惰行制御実行部3による惰行制御開始・終了の判定を有効とする振動影響除去部4とを備える。
(もっと読む)
惰行制御装置
【課題】低μ路走行時の惰行制御が回避できる惰行制御装置を提供する。
【解決手段】車両が低μ路走行中であることを認識する低μ路走行認識部4と、前記低μ路走行認識部により車両が低μ路走行中であることが認識されているときは惰行制御を禁止する低μ路走行中惰行制御禁止部5とを備える。
(もっと読む)
摩擦係合要素の制御方法
【課題】 摩擦係合要素の応答特性の低下を抑制可能な摩擦係合要素の制御方法を提供する。
【解決手段】 エンジンEが一定の条件下で作動している状態で、リニアソレノイド弁LS3に供給する電流にディザを付加し且つ電流の値を変化させることで発進クラッチ5を開放状態から係合状態に移行させる。その移行中、エンジンEに発生する負荷を検出する。そして、発進クラッチ5が係合状態になることで負荷が変化したときの指令圧力値Pcをディザに応じて補正し、その補正値を次回の発進クラッチ5の係合を開始させるための初期圧力値PcIとして設定する。
(もっと読む)
惰行制御装置
【課題】クラッチペダル踏み込み中の惰行制御終了時に違和感がない惰行制御装置を提供する。
【解決手段】惰行制御判定マップ2へのプロット点が惰行制御可能領域内かつアクセルペダル操作速度が所定範囲内かつプロット点が惰行制御しきい線をアクセル開度減少方向に通過したときクラッチ断及びエンジン回転数低下の惰行制御を開始し、アクセルペダル操作速度が所定範囲外又はプロット点が惰行制御可能領域外で惰行制御を終了する惰行制御実行部3と、惰行制御実行部3によるクラッチ断制御時にクラッチペダルが踏み込まれている状態で惰行制御実行部3が惰行制御を終了するときクラッチ断制御を続行させ、クラッチペダルが開放されるときクラッチ接制御を行わせるペダル開放時クラッチ接制御部4とを備える。
(もっと読む)
1 - 20 / 164
[ Back to top ]