
Fターム[3J062AB28]の内容
Fターム[3J062AB28]に分類される特許
61 - 76 / 76
直動リンク装置及びそれを用いたロボット並びに2足歩行ロボット
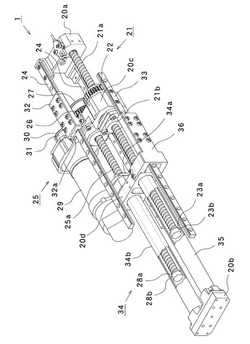
【課題】リンクを多段式とすることにより、最短リンク長が短く、しかもリンクのストロークを長くして可動範囲を大きくすることができる汎用性に優れた直動リンク装置の提供。
【解決手段】(a)第1のボールねじ軸21aと、第1のボールねじ軸21aに回動自在に螺合された第1のボールねじナット21bと、第1のボールねじナット21bの外周に形成又は固設された従動歯車22と、を有する第1節21と、(b)駆動モータ29と、駆動モータ29により回動する第2のボールねじ軸25aと、第2のボールねじ軸25aに貫設され第1節21の従動歯車22に歯合した主動歯車26と、を有する第2節25と、(c)第2節25の第2のボールねじ軸25aに回動自在に螺合された第2のボールねじナット34aと、第2のボールねじナット34aに連設され第2節25の第2のボールねじ軸25aに外挿された筒状体34bと、を有する第3節34と、を備えている。
(もっと読む)
ロボットの駆動機構及びロボットハンド

【課題】本発明は、1つのアクチュエータで2つの関節を駆動する機構において、高負荷がかかる姿勢においても、対象物に対して十分な操作力を加えることが可能な多関節ロボット、特に小型化されたロボットハンドの駆動機構を提供することを目的とする。
【解決手段】本発明のロボットの駆動機構は、第一リンクと第二リンクの接合部にある第一関節と、第二リンクと第三リンクの接合部にある第二関節の2つの関節を、1つのアクチュエータとリンクアームにより連動して駆動できるようにしたロボットの駆動機構において、アクチュエータを第一リンク又は第二リンクに配置し、リンクアームは、その一端部が第一リンクに設けられた第一支軸を介して回転可能に軸支されるとともに、他端部が第三リンクに設けられた第二支軸を介して回転可能に軸支され、第一リンク、第二リンク及び第三リンクの伸展姿勢にて、前記第一支軸を、前記第一関節の軸と前記第二支軸を結ぶ線上に配置することを特徴とする。
(もっと読む)
パラレルメカニズム及びそのキャリブレーション方法
【課題】キャリブレーションの実施に費やす作業時間を短縮すること及び機構パラメータの良好な同定精度を得ることを可能としたパラレルメカニズム及びそのキャリブレーション方法を提供する。
【解決手段】直交座標系で与えられるリンクヘッの回動位置及び移動位置に対応する指令値を機構パラメータに基づいてアクチュエータ356〜359に対する指令値に変換し、アクチュエータ356〜359を制御する制御部3を備え、この制御部3は、リンクヘッドに所定の回動量及び移動量で動作させたときのアクチュエータ356〜359に対する指令値とそのときの検出器380の出力値とに基づいて機構パラメータを補正する。
(もっと読む)
マニピュレータ、そのマニピュレータを備える多自由度マニピュレータ、6自由度マニピュレータ、二足歩行ロボット及び車両用電動シート装置、並びに、位置角度センサ
【課題】回転アクチュエータの小型化及び省電力化を図ることができる3自由度マニピュレータ等を提供することを目的とする。
【解決手段】3自由度マニピュレータ1は、内角を変更可能な6角形以上の多角枠状をなしている。そして、回転関節部のうち少なくとも3個は、回転アクチュエータからなり、残りは回転ジョイントからなる。特に、2個の回転ジョイントの間に、1個以上の回転アクチュエータが介在するようにするとよい。
(もっと読む)
リンク作動装置
【目的】 構造が簡単で、軽量コンパクトなリンク作動装置を提供する。
【構成】 静止部材1に対する可動部材4に、その軸線に対して垂直な平面内で軸中心から半径方向に三つの受け部6を円周等配位置に設け、可動部材4の各受け部6に球面部材5を半径方向に摺動可能にそれぞれ配置し、球面部材5の中心の静止部材1への投影位置が円周等配位置でそれぞれのPCR位置を保持するように、球面部材5を軸方向に摺動可能に静止部材1に設け、球面部材5と静止部材1間あるいは球面部材5と可動部材4間の少なくともいずれか一方に、可動部材4を静止部材1に対して所定の姿勢で固定する静止機構7を設ける。
(もっと読む)
線形アクチュエータを使用するパーソナルケア装置に対する作動システム
パーソナルケア装置の駆動システムは、逆位相モード又は平行(同相)モードのいずれにおいても動作することができる一組の線形アクチュエータ(20,22)を有する。当該システムは、運動変換器組立体(64)を有する。該運動変換器組立体は、2つの線形アクチュエータ(20,22)の逆位相作用を出力駆動シャフト(14)の回転作用へと変換し、同相作用を出力シャフトの並進運動に、あるいはポンプ等の装置の他の機能を駆動させるよう、変換する。運動変換器(64)は、逆位相モード及び同相モードにおいて同時に動作し、ワークピースの複雑な運動をもたらす。
 (もっと読む)
(もっと読む)
アクチュエータ並びにこれを用いたパラレルリンク機構及び長尺材の曲げ加工装置
【課題】 アクチュエータの取り付け部の寸法を可及的に小さくして、装置全体をコンパクトに構成するとともに、アクチュエータの機械剛性(サーボ剛性)を高める。
【解決手段】 アクチュエータ1は油圧シリンダ2とトラニオン方式ユニバーサルジョイント3とを備える。トラニオン方式ユニバーサルジョイント3は取付軸31と、取付軸31上に取付軸31の軸芯を回転中心として回転可能に配設され取付軸31の軸芯方向に突出する挟持部材32と、挟持部材32間に挟持部材32の回転方向に対して直交する方向に回動可能に軸支され油圧シリンダ2を保持する保持部材33とにより構成される。
(もっと読む)
非線形弾性機構及びロボット用関節機構
【課題】可及的に小さなハードウェアサイズで、ロボットの手首関節等の動きと剛性の可変制御を可能とするハードウェアを提供する。
【解決手段】非線形弾性機構において、モータ15と、モータ15によって動力が伝達される入力部14と、入力部14の動きに対応する出力部12と、入力部14と出力部12との間に設けられ弾性特性を有する弾性部材11と、を備える機構であって、モータ15によって入力部14が第一の動きをするとき、弾性部材11の弾性特性が該入力部14の動きに応じて変化する第一駆動モードと、モータ15によって入力部14が第一の動きとは異なる第二の動きをするとき、該入力部14の動きに連動して出力部12が変位する第二駆動モードと、を有する。
(もっと読む)
ロボットアーム
【課題】伸長状態でのアーム剛性と位置決め精度を向上することができるロボットアームを提供する。
【解決手段】第1及び第2のアーム311,321を連動させる連動部340が、一方が第2のアーム321に固定された等長の第1の連動リンク341,342と、これらに連結された等長の第2の連動リンク343,344とを有する交差リンク機構と、一方が第2の連動リンク343,344の片方に固定された等長の第3の連動リンク343,344と、一方が第1のアーム311に固定され他方が第1の連動リンク341,342のうち他方に固定された等長の第4の連動リンク347,348とを有する交差リンク機構とからなり、一方の第1の連動リンク341と一方の第4の連動リンク347とのいずれかは、第1又は第2のアーム311又は321に対し該アームの軸線から外れるよう傾けて固定されている。
(もっと読む)
4自由度高速パラレルロボット
本発明は、その一端において、工具(5)を支持する可動プラットフォーム(4)に関節式に連結され、その他端において、回転継手(2)を介してベースプレート(3)と一体構造のアクチュエータに関節式に連結される4つの連鎖(1)で構成される4自由度高速パラレルロボットに関する。可動プラットフォーム(4)は、関節式連結装置(13)によって互いに連結される4個の部材(11),(11’),(12),(12’)により構成され、これら部材の少なくとも2個は互いに平行で、可動プラットフォームの平面において1自由度を有する関節式可動プラットフォームを構成する。アクチュエータは、ベースプレート(2)においていずれの方向にも配置でき、好ましくは45°、35°、225°、315°で配置される。  (もっと読む)
(もっと読む)
運動伝達装置およびその構成部品
伝達運動を提供するアクチュエータとベース部材とを具備する運動伝達装置用の伝動部材であって、ベース部材に連結されるように構成され、かつベース部と湾曲部とを具備する第1のアームと、アクチュエータから伝動部材に運動を伝達する装置のアクチュエータに連結する少なくとも1つの連結手段とを具備する伝動部材。 (もっと読む)
運動伝達装置およびその部品
運動伝達装置であって、対称軸に関して1以上の自由度を提供する平行運動伝達構造を具え、前記平行運動伝達構造がベース部材と、可動部材と、当該ベース部材および可動部材を連結する1以上の平行運動チェーンとを具え、各平行運動チェーンが1の運動面内で動く第1アームを具え、前記運動面が対称軸から離れている装置である。 (もっと読む)
軸線方向揺動運動を回転自在のローラーに伝えるための装置
【課題】 幾何学的主回転軸線(R)を中心として回転自在のローラーに軸線方向揺動運動を伝えるための装置であって、ローラーに連結でき且つ伝動部材(17)に連結された減速歯車装置(10)を有し、伝動部材は、主回転軸線を中心として回転自在であると同時に軸線方向前後に移動でき、伝動部材は、二次回転軸線(S)を中心として回転自在にホルダ(33)に支承されたロータ(18)に、主回転軸線(R)から半径方向に間隔が隔てられたヒンジ(19)を介して連結されており、ヒンジは、経路内を惑星のように移動でき、経路の主回転軸線(R)に対する角度が伝動部材のストロークの軸線方向長さを決定し、これによってローラーのストロークの軸線方向長さを決定する、装置を提供する。
【解決手段】 減速歯車装置(10)及び伝動部材(17)は、固定壁シェル(32)並びにロータ用のホルダとして役立つケーシング(33)を含むハウジング(8)内に収容されており、ケーシングは、ローラーのストロークの軸線方向長さを再調節するため、壁シェルに対して回転できる。  (もっと読む)
(もっと読む)
回転・揺動変換機構
回転運動を大きな角度の揺動運動(往復回動運動)に効率的に変換できる回転・揺動変換機構を提供する。回転・揺動変換機構1は、回転軸2と、揺動軸3と、揺動部材4を備える。回転軸2は、モータに連係する垂直部2Aと、垂直部2Aに対して傾いた傾斜部2Cを有する。揺動部材4は、揺動軸3に取り付けられる。傾斜部2Cは、揺動部材4の狭持面4D、4Eの間に狭持され、回転軸2の回転に伴って、狭持面4D又は4Eに接しながら動くことにより、狭持面4D又は4Eを押して、揺動部材4を左右に揺動させる。これにより、揺動軸3は、往復回動運動を行う。  (もっと読む)
(もっと読む)
2つのサブアセンブリ手段から構成される可動要素を移動させる手段を備えるパラレルロボット
本発明は、基部要素(1)と該基部要素に移動を引き起こす手段を介して連結された可動要素(2)とを備える形式のロボットに関する。該移動を引き起こす手段は、第1サブアセンブリと第2サブアセンブリとを備え、第1サブアセンブリは、可動要素(2)を略垂直方向に沿って移動させるように設計され、第2サブアセンブリは、第1サブアセンブリを可動要素(2)に連結し、及び可動要素(2)を第1サブアセンブリとは無関係に略水平面内において移動させるように平行に並んで作動することができる少なくとも3つのアクチュエータ(4)を備えている。  (もっと読む)
(もっと読む)
並進3自由度を提供する平行運動伝達構造を有する運動伝達装置
本発明は、並進3自由度を提供する平行運動伝達構造(3)を有する運動伝達装置に関し、上記構造は、1つのベース部材(1)と、1つの可動部材(2)と、ベース部材(1)上に配置される少なくとも1つの回転アクチュエータ(30)と、ベース部材を可動部材に連結する、それぞれが枢動制御アーム(10)を備える平行運動チェーンとを備える。少なくとも1つの回転アクチュエータ(30)の回転運動は、可動部材の並進運動が制御アームの回転運動に、又は制御アームの回転運動が可動部材の並進運動に伝達されるように、各枢動制御アーム(10)に伝達される。少なくとも1つの回転アクチュエータ(30)は、その軸(31)が制御アーム(10)の回転軸に対してほぼ垂直であるように配置される。平行運動伝達構造は、3つの平行運動チェーンを備え、各チェーンは、枢動制御アームと、一端が回転2自由度継手によって制御アームの端に、他端が可動部材にヒンジ式に取り付けられることによりデルタタイプの配置を形成する、一対の平行リンク棒とを備える。各チェーンには各回転アクチュエータが設けられ、回転アクチュエータは、その軸が互いに対してほぼ平行であるように配置される。回転アクチュエータと制御アームとの間の運動は、ケーブル部材(51)によって伝達される。  (もっと読む)
(もっと読む)
61 - 76 / 76
[ Back to top ]