
Fターム[3J062AB28]の内容
Fターム[3J062AB28]に分類される特許
21 - 40 / 76
往復回転機構
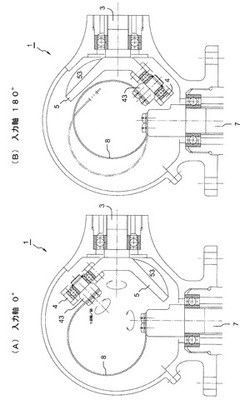
【課題】簡単かつ低コストで製造できる往復回転機構を提供する。
【解決手段】往復回転機構1は、モータの駆動により一方向に回転する入力軸3と、入力軸3の回転に連動して往復回転する出力軸7と、入力軸3と出力軸7の間に設けられた板バネ8よりなる伝動部材とを有している。モータを作動させるとその動力により入力軸3が回転し、それに伴って、入力軸3の先端にあるクランクアーム4とクランクピン43が一体となって旋回し続ける。この旋回動作に連動して、板バネ8が撓曲を繰り返しながら出力軸7を回転軸として揺動し、この揺動に連動して出力軸7が往復回転する。例えばこの往復回転機構を攪拌機に応用することで、往復回転式攪拌機を低コストで簡単に製造することができる。また、従来の往復回転機構で用いていた伝動アームに代えて板バネを利用することで構成部材が減るので、その分組立て工数が減り、簡単かつ低コストで製造することができる。
(もっと読む)
リンク作動装置

【課題】 可動部が自由度機構として構成され、可動部の可動範囲が広く、可動部が軽量で、可動部の位置決め精度が高いリンク作動装置を提供する。
【解決手段】 入力部材104に対し出力部材105を、3組以上のリンク機構101を介して姿勢を変更可能に連結する。リンク機構101は、入力側および出力側の端部リンク部材101a,101cと中央リンク部材101bとでなる。リンク機構101は、各リンク部材101a,101b,101cを直線で表現した幾何学モデルが、中央リンク部材101bの中央部に対する入力側部分と出力側部分とが対称を成す形状である。リンク機構用駆動源121により2組以上のリンク機構101を動作させて、出力部材105の姿勢を制御する。各リンク機構101の配置の内側に通して、可撓性を有し入力部材104および出力部材105の並び方向に回転力を伝達する可撓性ワイヤ4Aを設ける。
(もっと読む)
パラレルリンクロボット
【課題】一般に、ロボットの駆動源であるモータの取り付け方法として、モータフランジ面をプレートに固定し、このプレートを、ロボット本体に結合する構造を採用することが多い。パラレルリンクロボットにおいても、この構成が一般的である。しかしながら、従来の技術では、高速動作時の振動等の影響で、モータの主軸がぶれ、取り付け面とモータの相対位置がずれることにより、ロボットの位置決め精度が低下するという課題がある。
【解決手段】本発明のパラレルリンクロボットのモータ取付け方法は、対向するモータを取り付ける部材を有し、これを一体のブロック構造とするものである。これにより、従来の課題を解決し、少なくとも対向する2つのモータ主軸の中心軸を一致させ、高速動作時におけるロボットの位置決め精度低下を軽減する方法および装置である。
(もっと読む)
力検出機能をもった駆動装置
【課題】駆動機能と力検出機能を備えた装置の構造単純化/薄型化を図る。
【解決手段】上方基板15と下方基板25との間に、2本のリニアアクチュエータU1,U2を、互いに逆方向に傾斜するように配置する。アクチュエータU1,U2の上端は、上方膜部11,12を介して上方基板15に接続され、下端は、導電性の下方膜部21,22を介して下方基板25に接続される。上方基板15に右方向の力が作用して右方へスライドすると、U1は寝る方向へ傾いて下方膜部21は上方へ変形し、U2は立つ方向へ傾いて下方膜部22は下方へ変形する。下方膜部21と電極E5による容量素子と、下方膜部22と電極E6による容量素子との容量値の差により、X軸方向の力検出を行う。両容量値の和により、Z軸方向の力検出もできる。アクチュエータU1,U2を伸縮駆動すれば、上方基板15を移動させたり回転させたりできる。
(もっと読む)
3自由度能動回転関節
【課題】3自由度能動回転関節の小型化および軽量化を図ると共に回転アクチュエータをバランスよく配置させて、一対のリンク間の動特性を向上させる。
【解決手段】一方のリンク10aが接続される回転体20と、各出力軸101x、101y、101zが回転体20の中心に指向し相互に直交するように配置され、回転体20を回転させるX軸用、Y軸用、Z軸用の回転アクチュエータ100x、100y、100zと、各回転アクチュエータ100x、100y、100zの出力軸101x、101y、101zを回転体20に結合させる位置で支持すると共に回転体20の他の2軸まわりの回転を許容する可動体110x、110y、110zと、を備え、一方のリンク10aは回転体20に対して、各出力軸101x、101y、101zから略同距離の位置に接続されている。
(もっと読む)
駆動ユニットを備えた機械構造
【課題】広い移動領域を得られ、駆動源を有効に利用しやすい、駆動ユニットを備えた機械構造を提供する。
【解決手段】少なくとも3つの駆動ユニット50x,52x,54xが、基準面に沿って1方向又は2方向に能動移動が可能である。駆動ユニット50x,52x,54xが基準面に沿って能動移動する自由度の合計の数が4以上である。駆動ユニット50x,52x,54xは、それぞれ、基礎部材20又は支持部材30,32,34の可動部30y,32y,34yに固定され、移動体11を移動及び回転させる。少なくとも1つの駆動ユニット50x,52x,54xが、支持部材30,32,34の可動部30y,32y,34yに固定され、基準面に沿って能動移動することにより、支持部材30,32,34の案内部30x,32x,34xに固定された仮想線30z,32z,34zに沿って移動が可能である。
(もっと読む)
三次元的動作機構構造体
【課題】小型化された構造で頭の動きを模することができるとともに製造コストを抑え、位置制御を確実でしかも容易に行うことのできる三次元的動作機構構造体を提供すること。
【解決手段】三次元的動作機構構造体は、頭部と、前記頭部の下方に位置するよう配設された胴部と、前記頭部に接続されるとともに、前記胴部に軸支された左右回動部材に連結され、前記左右回動部材を回動することにより、前記頭部を左右に揺動させる左右揺動用平行リンク機構と、前記頭部の前方または後方のいずれか一方に接続されるとともに、前記胴部に軸支された前後回動部材を回動することにより、前記頭部を前後に揺動させる前後揺動用リンク機構と、を備え、前記左右回動部材と前記前後回動部材とを回動することにより、前記頭部を三次元的に動作させるよう構成されている。
(もっと読む)
ヘキサポッド
独立した継ぎ手に装着された少なくとも5本、好ましくは6本のロッドがその上に配置された、好ましくは板状の受け器を備え、各ロッドのもう一方の端はマウンティングに接合されており、全てのマウンティングが移動路に沿って動くことができる、ヘキサポッドである。各マウンティング(8)を独立した支持部(3)に配置し、各マウンティング(8)がそれぞれの支持部(3)に沿って移動可能であるか、またはそれぞれの支持部(3)が対応のマウンティング(8)とともに移動可能であるかのいずれかであり、支持部(3)が環または環の一部であるか、あるいは二次元または三次元的な回旋状の空間形態を有し、閉じたまたは開いた移動路を規定している。 (もっと読む)
ロボットの関節機構の制御装置
【課題】ジンバルリンクを有するロボットの関節機構による動作を簡易なアルゴリズムで高精度に解析することができるロボットの関節機構の制御装置を提供する。
【解決手段】固定位置算出手段により、第1モータ191および第2モータ192のモータ角θ1およびθ2から、第1ロッド171および第2ロッド172の他端位置171b,172bを算出しておき、仮ロッド長算出手段12が、一端位置171a,172bの前回値を用いて、第1ロッド171および第2ロッド172の仮ロッド長L´を算出する。そして、ロッド不定位置決定手段16が、この仮ロッド長L´と実際のロッド長Lとの偏差であるロッド偏差ΔDを0に収束させることで、第1ロッド171および第2ロッド172の一端位置171a,172aを決定する。最終角度出力手段17が、一端位置171a,172aから、メインリンク150の姿勢角α,βや手180の姿勢角を算出して出力する。
(もっと読む)
ロボットアーム
【課題】均一で安定した予圧を付与することが可能で、軸受の長寿命化が可能なロボットアームを提供する。
【解決手段】リンク機構を用いたロボットアーム10であって、スリーブ41とハウジング42との間に転がり軸受43が設けられた転がり軸受ユニット40が関節部15に使用される。
(もっと読む)
平行アームを持つロボットあるいは触覚インターフェース構造体
本発明は6自由度を有すると共にベース(2)と二つの平行なアーム(B,B')とリストジョイント(P)とを有するロボットまたは触覚インターフェース構造体に関し、アーム(B,B')はベース(2)とリストジョイント(P)との間に回動可能に設けられ、アーム(B,B')は、ショルダージョイント(3,3')とアーム(4,4')とリストジョイント(P)を支持する前腕(6,6')とを具備し、リストジョイント(P)は、それに対してハンドルホルダー(18)が第1の回転軸線(X)を中心として連結される連結セグメント(24)と、第2の回転軸線(Z)を中心としてハンドルホルダー(18)に回動可能に連結されたハンドル(16)であって、第1の軸線(X)、第2の軸線(Z)および第3の軸線(Y)を中心として回動可能なハンドル(16)とを備え、連結セグメント(24)の回転に対する少なくとも第1の回転軸線(X)を中心とするリストジョイント(16)の回転を低速化する手段が連結セグメント(24)に対して、さらにヒンジ結合されている。  (もっと読む)
(もっと読む)
マニピュレータ及びこれを用いたマニピュレーション装置
【課題】簡易でかつ新規な構造を持つ、屈曲動作が可能なマニピュレータを提供する。
【解決手段】第1駆動シャフト101は、それ自身の中心軸を中心として回動する。第2フレーム104は、第1フレーム102に対して回動する。第1フェースギヤ部材103は、第1駆動シャフト101により、正逆方向に回転駆動される。第3フレーム108は、第2フレーム104に対して回動する。第1ギヤ部材105は、第2フレーム104に固定されている。第1ギヤ部材105及び第2ギヤ部材106は、いずれも、第1フェースギヤ部材103によって回転駆動される。第2フレーム104は、第1ギヤ部材105の回動に伴って回動する。第3ギヤ部材107は、第2ギヤ部材106によって回転駆動される。第3ギヤ部材107は、第3フレーム108に固定されている。第3フレーム108は、第3ギヤ部材107の回動に伴って回動する。
(もっと読む)
6自由度パラレル機構
【課題】エンドエフェクタが、1軸周りに連続回転することができ、ベースに対して大きな姿勢角を取ることができる、6自由度パラレル機構を提供する。
【解決手段】6自由度パラレル機構の連鎖が、ベースと、ベースの中心からベースの垂直方向上方に延びるZ軸周りを回転するように、第1の回転軸受を介してベースに取り付けられたアームと、アーム上に固定されたリニアガイドと、リニアガイドの上を往復するスライダと、球面軸受を介してスライダに接続されたリンクと、リンクの球面軸受とは反対の側に取り付けられた第2の回転軸受と、を備え、6自由度パラレル機構を、ベースとエンドエフェクタとの間に、連鎖を3本並列配置して構成し、エンドエフェクタとリンクとを、第2の回転軸受によって、互いに離れた3箇所で結合する。
(もっと読む)
自由運動シミュレータ装置
【課題】 航空機や自動車用シミュレータとして、従来からスチュワート型のパラレルメカニズムが用いられているが、特に、小型航空機の極限的動作、特に失速、きりもみ等の状態の再現では傾斜角が不足し、動作範囲も狭いことから、小型、低価格で動作範囲が広く、角度を大きく取れる、新規のパラレルメカニズムからなる小型航空機用のモーション付きシミュレータを提供する。
【解決手段】平面上に一端を同一軸に固定した、直線駆動アクチュエータ2を用い、該アクチュエータ2の他端に直角方向に駆動可能とする駆動装置6を設け、円周方向移動と同時に軸方向移動を可能とする3組のアクチュエータ2で構成されると共に、モーションプレート1は、その下部に、円周上の対向位置に120度間隔で3組の受け部を配置し、平面上に設置したアクチュエータと、モーションプレート1の受け部とを、それぞれ対応するように、上部に回転軸受構造4、下部に球面軸受構造5を有する3組の脚部3で連結した構成のパラレルメカニズムからなるものとする。
(もっと読む)
揺動装置
【課題】モータの質量に関わらず、応答性の高い揺動装置を提供する。
【解決手段】揺動装置10は、ベース12と、揺動テーブル14と、複数のリンク機構20と、当該リンク機構20を駆動するモータ26と、リンク機構20と揺動テーブル14との間に介在する連結部材と、を備える。リンク機構20は、モータの駆動に応じて、その上端位置がリンク機構面内で変化するものの、リンク機構面の位置およびリンク機構面の角度は不変である。連結部材は、スライド機構22と、X,Y,Z軸回りの回動を許容する回転ジョイントと、を有しており、揺動テーブル14がリンク機構20に対して回動およびスライドすることを許容する。そして、かかる構成とすることで、モータ26をベース12に固定設置(位置固定)することが可能となる。そして、結果として、リンク機構20、ひいては、揺動装置10の応答性を向上することができる。
(もっと読む)
パラレルメカニズム及びその制御方法
【課題】一般に、パラレルメカニズムは、外力に対する安定性は十分に備えているが、特異点や、ジョイントの動作範囲による制限のためにテーブルの動作角度が十分に取れないという短所がある。
【解決手段】そこで本発明では、ベースとテーブルの間に複数のリニアアクチュエータを回転ジョイントを介して並列に配置したパラレルメカニズムにおいて、リニアアクチュエータは7個以上とし、それらのリニアアクチュエータの動作を制御する制御装置に、適宜選択した6個のリニアアクチュエータのみを能動動作させると同時に、残りのリニアアクチュエータを受動動作させる制御機能を設けたパラレルメカニズムにより上述した課題を解決している。
(もっと読む)
パラレルリンクステージおよび光学素子測定装置
【課題】パラレルリンクステージおよび光学素子測定装置において、パラレルリンク機構の並列方向に沿う可動部材の回転範囲を向上することができるとともに可動部材およびパラレルリンク機構によって囲まれる領域の中心部に開放空間を形成することができるようにする。
【解決手段】パラレルリンクステージ1は、回転軸線C回りに回転可能に支持された回転台部2と、回転台部2を回転軸線C回りに回転させるモータ10と、回転台部2と間隔をあけて配置される可動部材3と、回転台部2および可動部材3の間で回転軸線Cを取り囲むように周方向に間隔をあけて少なくとも3箇所で回転台部2および可動部材3を連結し、回転台部2に対する可動部材3の各連結距離を変化させるパラレルリンク機構4と、パラレルリンク機構4およびモータ10の動作制御を行うことにより、可動部材3の位置制御および姿勢制御を行う制御ユニット50と、を備える。
(もっと読む)
動力伝動装置
【課題】往復運動や揺動運動を、回転運動に変換するとともに、弱い力で入力してもパワーアップして回転トルクを高め、さらに回転軸心の方向も直交する方向に変換可能な簡単な構成の動力伝動装置を実現する。
【解決手段】往復駆動歯車5が時計方向に回転すると、第1の往復回転歯車23は反時計方向に回転して、第1の一方向クラッチ34を介して第1の一方向回転歯車26を反時計方向に回転させ、往復駆動歯車5が反時計方向に回転すると、第2の往復回転歯車35は反時計方向に回転して、第2の一方向クラッチ36を介して第2の一方向回転歯車38を反時計方向に回転させる。
(もっと読む)
商品充填方法および商品充填装置
【課題】 パラレルロボットを用いて商品の段ボール箱への導入を効率よく行う。
【解決手段】 パラレルリンク対44、45、46の先端に連結された吸着パッド47を一定の三次元空間内の任意の位置に配置し得るパラレルロボット4を用いた商品充填方法であって、第1の搬送コンベア2により商品Pを搬送しつつ、商品Pが充填される段ボール箱Bを第2の搬送コンベア3により搬送するとともに、段ボール箱Bのフラップのうち、第1、第2の搬送コンベア2、3間に配置される第1のフラップB1を、第2の搬送コンベア3の搬送方向に沿って延設された第1のガイドバー10によって、段ボール箱Bの搬送中に拡開させるとともに、パラレルロボット4の吸着パッド47により第1のコンベア2上の商品Pを保持し、これを第2の搬送コンベア3により搬送中の段ボール箱B内に、拡開された第1のフラップB1の上を通って導入する。
(もっと読む)
パラレルリンクステージの調整方法、基準位置決め治具、およびパラレルリンクステージ
【課題】パラレルリンクステージの調整方法、基準位置決め治具、およびパラレルリンクステージにおいて、ベースに対するエンドエフェクタの基準位置出しとアクチュエータの原点補正とを、高精度かつ容易に行うことができるようにする。
【解決手段】パラレルリンクステージの調整方法であって、各パラレルリンク機構の動作を自由化するリンク自由化工程と、ベース2およびエンドエフェクタ3を相対移動させ、上基準部材28および下基準部材30を介して、ベース2およびエンドエフェクタ3を一定の位置関係に連結する位置出し工程と、各パラレルリンク機構のエンコーダから、各リンク長を取得して制御部に記憶させる調整位置取得工程と、上基準部材28および下基準部材30をパラレルリンクステージから取り外す基準位置決め治具取り外し工程と、各パラレルリンク機構の各リンク長を、制御部に記憶された各リンク長に設定する位置初期化工程とを備える。
(もっと読む)
21 - 40 / 76
[ Back to top ]