
Fターム[3J062AC10]の内容
Fターム[3J062AC10]に分類される特許
21 - 40 / 48
6自由度パラレル機構
【課題】エンドエフェクタが、1軸周りに連続回転することができ、ベースに対して大きな姿勢角を取ることができる、6自由度パラレル機構を提供する。
【解決手段】6自由度パラレル機構の連鎖が、ベースと、ベースの中心からベースの垂直方向上方に延びるZ軸周りを回転するように、第1の回転軸受を介してベースに取り付けられたアームと、アーム上に固定されたリニアガイドと、リニアガイドの上を往復するスライダと、球面軸受を介してスライダに接続されたリンクと、リンクの球面軸受とは反対の側に取り付けられた第2の回転軸受と、を備え、6自由度パラレル機構を、ベースとエンドエフェクタとの間に、連鎖を3本並列配置して構成し、エンドエフェクタとリンクとを、第2の回転軸受によって、互いに離れた3箇所で結合する。
(もっと読む)
自由運動シミュレータ装置

【課題】 航空機や自動車用シミュレータとして、従来からスチュワート型のパラレルメカニズムが用いられているが、特に、小型航空機の極限的動作、特に失速、きりもみ等の状態の再現では傾斜角が不足し、動作範囲も狭いことから、小型、低価格で動作範囲が広く、角度を大きく取れる、新規のパラレルメカニズムからなる小型航空機用のモーション付きシミュレータを提供する。
【解決手段】平面上に一端を同一軸に固定した、直線駆動アクチュエータ2を用い、該アクチュエータ2の他端に直角方向に駆動可能とする駆動装置6を設け、円周方向移動と同時に軸方向移動を可能とする3組のアクチュエータ2で構成されると共に、モーションプレート1は、その下部に、円周上の対向位置に120度間隔で3組の受け部を配置し、平面上に設置したアクチュエータと、モーションプレート1の受け部とを、それぞれ対応するように、上部に回転軸受構造4、下部に球面軸受構造5を有する3組の脚部3で連結した構成のパラレルメカニズムからなるものとする。
(もっと読む)
パラレルメカニズム及びその制御方法
【課題】一般に、パラレルメカニズムは、外力に対する安定性は十分に備えているが、特異点や、ジョイントの動作範囲による制限のためにテーブルの動作角度が十分に取れないという短所がある。
【解決手段】そこで本発明では、ベースとテーブルの間に複数のリニアアクチュエータを回転ジョイントを介して並列に配置したパラレルメカニズムにおいて、リニアアクチュエータは7個以上とし、それらのリニアアクチュエータの動作を制御する制御装置に、適宜選択した6個のリニアアクチュエータのみを能動動作させると同時に、残りのリニアアクチュエータを受動動作させる制御機能を設けたパラレルメカニズムにより上述した課題を解決している。
(もっと読む)
車両用シートのクラッチ機構
【課題】乗員に体格差が生じている場合であっても、車両の後突によって生じる乗員の背凭れ荷重のみを揺動部材へ伝達可能な車両用シートのクラッチ機構を提供することである。
【解決手段】車両用シートのクラッチ機構は、車両の後突によって生じる慣性力がウェイト64に作用した状態で、受圧部材50がシート1に着座した乗員の背凭れ荷重を受けて回動すると、その回動によって連結アーム60に形成されたピン65がシートバック20のフレーム22側に組み付けられた揺動部材70に形成されたリブ73を押し当てて揺動部材70を回動させるように移動することで、乗員の背凭れ荷重を揺動部材70へ伝達する。揺動部材70のリブ73には、受圧部材50の回動によって移動している連結アーム60のピン65が嵌まり込み可能な切欠73bが形成されており、この切欠73bに連結アーム60のピン65が嵌り込むと、揺動部材70を回動させる。
(もっと読む)
パラレル型リンクロボットにおける関節角の誤差検知装置
【課題】パラレル型リンクロボットにおいて、その関節角を検出する検出部の検出誤差を的確に検知する。
【解決手段】n角形リンク機構(nは4以上の整数)を有するパラレル型リンクロボットにおいて、関節角の検出部における検出誤差を検知する誤差検知装置であって、n角形リンク機構を構成する関節部のうち、n−1個の関節部における関節角をそれぞれ検出する関節角検出部と、n角形リンク機構の構造的条件の下、該n角形リンク機構の各リンク部材の長さと、関節角検出部によって検出されたn−1個の関節部の関節角とに基づき、関節角における角度誤差に関するパラメータを取得する角度誤差パラメータ取得部と、角度誤差パラメータ取得部によって取得されたパラメータに基づいて、n−1個の関節部のうち何れの関節部において角度誤差が生じているかについての判断を行う誤差判定部と、を備える。
(もっと読む)
ロボットアーム
【課題】小型の回転関節を備えていても高加速トルクを供給することができること。
【解決手段】駆動側リンク4cと従動側リンク4dとが従動側リンクを駆動側リンクに対して回転駆動させるトルクを供給する回転関節5cを介して連結されたリンク機構を有する装置であって、駆動側リンクに、回転関節の前記トルクのうちの加速トルクを補助するための加速補助トルクを供給する加速補助トルク供給機構7を備えることを特徴とするロボットアームを提供する。
(もっと読む)
自由運動フライトシミュレータ装置
【課題】 航空機用シミュレータとして、従来から大型機用としてスチュワート型のパラレルメカニズムが用いられているが、小型機の極限的動作、特に失速、きりもみ等の状態の再現では傾斜角が不足し、動作範囲も狭いことから、小型、低価格で動作範囲が広く、角度を大きく取れる、新規のパラレルメカニズムからなる小形機用モーション付きフライトシミュレータを提供する。
【解決手段】 平面上に2本の直線駆動アクチュエータ2を直角に交差させたX−Yユニット6を3組、円周上の対向位置に120度間隔で配置すると共に、モーションプレート1の下部に、円周上の対向位置に120度間隔で3組の受け部を配置し、該X−Yユニット6の駆動部と、該モーションプレートの受け部とを、それぞれ対応するように、上部に回転軸受構造4を有し、下部に球面軸受構造5を有する3組の脚部3で連結した構成のパラレルメカニズムからなるものとする。
(もっと読む)
揺動軸受、それを用いたパラレルリンク機構、および移動ステージ
【課題】揺動軸受、それを用いたパラレルリンク機構、および移動ステージにおいて、小型化に適し、経時的にも円滑かつ高精度を維持することができるようにする。
【解決手段】球状ジョイント部30bが設けられた可動軸30と、軸受本体9との組合せからなる揺動軸受3であって、軸受本体9は、球状ジョイント部30bを球中心点回りにすべり支持する凹球面部8b、内側球面部7aと、可動軸30を揺動可能に挿通させるための開口部7cと、開口部7cの近傍の外表面側に、凹球面部8b、内側球面部7aと同心に形成された外側球面部7bと、凹球面部8bの一部に開口し、潤滑流体6を供給する流体供給溝8dとを備え、可動軸30は、球状ジョイント部30b近傍で、軸部30aに径方向に突出して固定され、開口部7cを覆った状態で外側球面部7bに摺動可能に密着された流体封止部材31を備える。
(もっと読む)
立体カム機構
【課題】 カム案内面形状の自在な選定を可能として、従節側の目標軌跡の選定の自由度を格段に向上させ、直交軸間の動力伝達に限ることなく、強力かつ確実な動力の伝達が可能で、可逆的な動作も可能な立体カム機構を提供することを目的とする。
【解決手段】 立体カム1に3次元的なカム案内面2(3)を形成するとともに、このカム案内面2に前記従節側リンク4の一端に所定の角度にて形成したカムフォロワ6(7)をガイドさせるようにして、立体カム1の回転運動を従節側リンク4の他端の揺動運動に変換するように構成したことにより、カム案内面形状の自在な選定を可能として、従節側の目標軌跡の選定の自由度を格段に向上させ、支持部材の形状の選定と相まって、直交軸間の動力伝達に限定されることなく、また、バックラッシを伴うことなしに、カム案内面形状の自在な設計により立体カムの円滑な動作が得られる。
(もっと読む)
パラレルリンク型作業装置
【課題】周囲の物体との干渉の危険性を低減したパラレルリンク型作業装置。
【解決手段】各動力伝達部は、リンクLK、ジョイントJ3、ロッド10、ジョイントJ4で構成され、ジョイントJ3はリンクLKとロッド10の一端を接続し、ジョイントJ4は、可動部MVとロッド10の他端を接続する。ロッド10は一方側に凸の湾曲部または屈曲部を持ち、その姿勢は、軸線G、H回りの相対回転のみ許容する自由度2の各ジョイントJ3で、凸側が各リンクLKの位置に拘らず、ベース中心側を向いたままに維持される。ロッド姿勢維持手段として、一端がロッド10の湾曲または屈曲個所に接続され、他端がベース上に接続された弾性を有する紐状の部材を利用することもできる。
(もっと読む)
3自由度回転システムのガイドレールストッパ機構とその応用
【課題】3自由度回転システムにおいて、ロータの回転が制御不能となる特異点を、アクチュエータ等の複雑な機構を使用せずに回避する。
【解決手段】第一ガイドレール11と、これと直交する第二、第三ガイドレール12、13を備えた3自由度回転システム100において、凹部72cを備えたメス型ストッパ72を第二ガイドレール12または第三ガイドレール13のいずれか一方に備えさせ、オス型ストッパ71をもう一方のガイドレールに備えさせ、オス型ストッパ71が凹部72cの中をスライドするとともに、オス型ストッパ71が凹部72cのどちらか一方の端に当たることにより、オス型ストッパ71のスライドが制限され、これにより、第二ガイドレール12と第三ガイドレール13の回転角度の差分が制限される。
(もっと読む)
作業補助装置および複合パンタグラフ機構
【課題】構造の簡略化を図るとともに汎用性の高い作業補助装置を提供する。
【解決手段】本発明に係る作業補助装置A1は、支持ベース1と、支持ベース1に対してZ軸方向に伸縮するZ軸駆動機構2と、Z軸駆動機構2に対して基端部が接続され、この基端部に対して先端部がX軸,Y軸方向に沿って揺動する揺動駆動機構3と、上記先端部に接続され、XYZ方向に操作可能な操作部材4と、操作部材4のXYZ方向の操作力を個別に検出する操作力検出手段5と、操作力検出手段5からの情報に基づきZ軸駆動機構2および揺動駆動機構3を操作部材4の操作方向への移動を支援するように制御する制御手段とを備える。また、揺動駆動機構3は、上記基端部に対して上記先端部がX軸に沿って揺動可能な第1のパンタグラフ機構と、上記基端部に対して上記先端部がY軸に沿って揺動可能な第2のパンタグラフ機構との複合パンタグラフ機構によって構成される。
(もっと読む)
3自由度能動回転関節
【課題】各自由度方向からなる任意の方向への一様な回転運動が可能であり、球関節に近いシンプルな構造を有する3自由度能動回転関節を提供する。
【解決手段】X軸用、Y軸用、Z軸用の中空軸回転型モータ20x、20y、20zの中空軸に挿設された出力軸21x、21y、21zに結合する回転球10と、中空軸回転型モータ20x、20y、20zをそれぞれ、それ自身の軸線まわりの回転を規制するとともに、他の直交2軸まわりのうち一方への回動を許容するように支持する可動支持体30x、30y、30zと、可動支持体30x、30y、30zをそれぞれ前記他の直交2軸まわりのうち他方への回動を許容するように支持する支持体50とを備え、一方のリンク60aがZ軸用の中空軸回転型モータ20zの後端から突出する出力軸21zに同軸上に固定され、他方のリンク60bが支持体50の支持端部50zの外面側に固定される。
(もっと読む)
ピボットジョイント
ピボットジョイントは、一端に配置されたボールを有する第1部材と、第1部材のボール上に位置する、1つまたは複数の支承表面を有する固定部材と、第1部材のボール上に位置する、一端に配置された1つまたは複数の支承表面を有する第2部材とを備える。第1部材と第2部材は、ボールの中心の周りで回転可能である。このタイプのピボットジョイントは、スチュアートプラットフォーム(Stewart platform)などの機械で使用するのに適する。 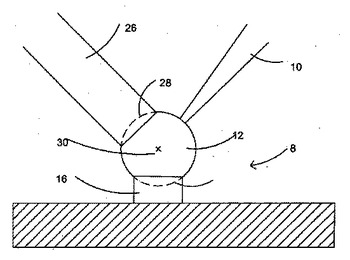 (もっと読む)
(もっと読む)
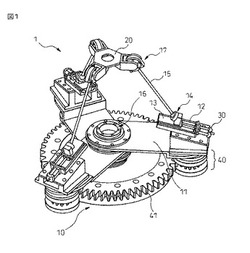
座標位置決め機械
座標位置決め装置は、ベース(12)と、構造体(14)と、ベースおよび構造体を結合する6つの支柱(22,24,26,28,30,32)を有する。ベース、構造体および6つの支柱によって作動空間が画成される。支持構造体からは支持部材(16)が延在している。作動空間内への少なくとも1つのアクセス領域が設けられ、そのアクセス範囲は隣接する2つの支柱(22,32)により形成され、アクセス領域の範囲は他の隣接する支柱のセット間の範囲よりも大である。これにより作動空間へのアクセスが改善される。  (もっと読む)
(もっと読む)
晶析方法、及び晶析装置
【課題】 本発明は、二次核発生を抑制し、少ない種晶で以て平均粒径の大きい結晶を析出させることができる晶析方法を提供することを課題とする。
【解決手段】 種晶と化合物を含む溶液を晶析槽200に供給し、晶析槽200内に設けられた攪拌装置500によって該溶液を攪拌し、種晶の表面に化合物の結晶を析出させる晶析方法において、攪拌装置500として、偏平状の2つの攪拌パドルを有する攪拌手段と、回転駆動手段からの回転力を受けて2本の平行な回転出力軸を互いに反対方向へ回転させて攪拌手段側に伝達する回転力伝達手段とを備え、回転中の2本の回転出力軸の各角速度が補完的に変化する状態で2つの攪拌パドルに8の字形のパドル運動を行わせるリンク機構を構成した攪拌装置を用いる晶析方法。
(もっと読む)
ロボットの駆動機構及びロボットハンド
【課題】本発明は、1つのアクチュエータで2つの関節を駆動する機構において、高負荷がかかる姿勢においても、対象物に対して十分な操作力を加えることが可能な多関節ロボット、特に小型化されたロボットハンドの駆動機構を提供することを目的とする。
【解決手段】本発明のロボットの駆動機構は、第一リンクと第二リンクの接合部にある第一関節と、第二リンクと第三リンクの接合部にある第二関節の2つの関節を、1つのアクチュエータとリンクアームにより連動して駆動できるようにしたロボットの駆動機構において、アクチュエータを第一リンク又は第二リンクに配置し、リンクアームは、その一端部が第一リンクに設けられた第一支軸を介して回転可能に軸支されるとともに、他端部が第三リンクに設けられた第二支軸を介して回転可能に軸支され、第一リンク、第二リンク及び第三リンクの伸展姿勢にて、前記第一支軸を、前記第一関節の軸と前記第二支軸を結ぶ線上に配置することを特徴とする。
(もっと読む)
関節装置
【課題】2つの部品の相対回転角を少なくとも2つ回転軸周りに制御可能な関節装置を小型化する技術を提供する。
【解決手段】2つの部品10と20は支柱30によって分離不能かつ回転可能に連結されている。2つの部品の間に複数のリンク部材50が支持されている。リンク部材はアクチュエータによって伸縮可能である。リンク部材50の先端には凸の球面を有する球面部52が形成されている。第2部品には凹の球面を有するリンク支持部14が形成されている。球状部52とリンク支持部14は半球を超えない範囲で球面接触する。第1部品20と第2部品10が支柱30によって分離不能に連結されているため、リンク部材50と第2部品10は半球を超えない範囲で球面接触する構造でもその接触状態を保つことができる。リンク部材50と第2部品10を球面接触する構造は小型化に適している。小型の関節装置を実現できる。
(もっと読む)
パラレルメカニズム及びそのキャリブレーション方法
【課題】キャリブレーションの実施に費やす作業時間を短縮すること及び機構パラメータの良好な同定精度を得ることを可能としたパラレルメカニズム及びそのキャリブレーション方法を提供する。
【解決手段】直交座標系で与えられるリンクヘッの回動位置及び移動位置に対応する指令値を機構パラメータに基づいてアクチュエータ356〜359に対する指令値に変換し、アクチュエータ356〜359を制御する制御部3を備え、この制御部3は、リンクヘッドに所定の回動量及び移動量で動作させたときのアクチュエータ356〜359に対する指令値とそのときの検出器380の出力値とに基づいて機構パラメータを補正する。
(もっと読む)
マニピュレータ、そのマニピュレータを備える多自由度マニピュレータ、6自由度マニピュレータ、二足歩行ロボット及び車両用電動シート装置、並びに、位置角度センサ
【課題】回転アクチュエータの小型化及び省電力化を図ることができる3自由度マニピュレータ等を提供することを目的とする。
【解決手段】3自由度マニピュレータ1は、内角を変更可能な6角形以上の多角枠状をなしている。そして、回転関節部のうち少なくとも3個は、回転アクチュエータからなり、残りは回転ジョイントからなる。特に、2個の回転ジョイントの間に、1個以上の回転アクチュエータが介在するようにするとよい。
(もっと読む)
21 - 40 / 48
[ Back to top ]