
Fターム[3J552PA38]の内容
伝動装置(歯車、巻掛け、摩擦)の制御 (81,513) | 目的(一般) (9,045) | 車両関係 (1,319) | 車速制限(最高速度制限) (23)
Fターム[3J552PA38]に分類される特許
1 - 20 / 23
車両の走行制御装置
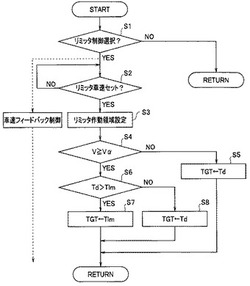
【課題】車速制限制御に切り換えられた際に、自車両の車速を制限車速に滑らかに収束させると共に、不自然な変速を防止する。
【解決手段】自車両の車速リミッタ作動領域に入っているか否かを調べ(S4)、リミッタ作動領域内に入った場合、ドライバのアクセル操作に基づくドライバ要求トルクTdとリミッタ制御のリミッタ要求トルクTlmとを比較し(S6)、Td>Tlmの場合、リミッタ要求トルクTlmを目標トルクTGTとして設定し(S7)、Td≦Tlmの場合、ドライバ要求トルクTdを目標トルクTGTとして設定し(S8)、自車両の車速をリミッタ車速に円滑に収束させる。また、このとき、クルーズ制御における仮想アクセル開度を用いてリミッタ制御時の変速を制御することで、不自然な変速を防止する。
(もっと読む)
トラクタの変速装置

【課題】副変速を有した多段変速走行のトラクタにおいて、路上走行等の高速走行を安全に行なわせると共に、簡単で的確な変速操作を行なわせることを目的とする。
【解決手段】主変速装置26と、副変速装置27と、前後進切替装置A、及び自動変速操作可能のアクセルペダル40を有すると共に、このアクセルペダル40による変速域を、後進側最高速位置が前進側最高速位置よりも低い低速域に設定する。アクセルペダル40による自動変速操作の低速域は、副変速レバー41の路上速位置への操作によって設定する。
(もっと読む)
作業車両の制御装置
【課題】良好な掘削作業を可能とする。
【解決手段】パワーモードまたはエコノミーモードを選択する選択手段19と、速度比検出手段14,15により検出されたトルコン速度比eが所定値ea以下、かつ、負荷圧検出手段16により検出された作業用ポンプ7の負荷圧Pが所定値PB以上である速度制限条件の成否を判定する判定手段10と、判定手段10により速度制限条件が成立と判定されたときは、エコノミーモード選択時のエンジン最高回転速度NEをパワーモード選択時のエンジン最高回転速度NPよりも低速側に制限するエンジン回転速度制限手段10,22と、判定手段10により速度制限条件が非成立と判定されたときは、エコノミーモード選択時の最高車速をパワーモード選択時の最高車速よりも低速側に制限する車速制限手段10,22とを備える。
(もっと読む)
作業車の最高速度制御機構
【課題】変速アクチュエータを駆動制御して移動速度を変更する構成において、最高移動速度を制限する最高速度設定器を備えることにより、操作性および走行性の良い作業車の最高速度制御機構を提供する。
【解決手段】エンジン5が搭載された走行機体3と、無段変速装置と、変速ペダル16(変速操作具)と、変速ペダル(変速操作具)の操作量に基づいて無段変速装置を変速制御する変速アクチュエータと、を備えた田植機1において、変速ペダル(変速操作具)を最大に操作したときの最高移動速度を制限する最高速度設定器を設け、路上走行または走行機体の傾動によって、最高移動速度を制限可能に構成した田植機(作業車)の最高速度制御機構である。
(もっと読む)
車両の制御装置
【課題】道路の勾配変化によって車両前方の見通しが損なわれる場合において、適切な時点(地点)にて運転者に的確な情報を提供し、又は、車両が安定して走行できるように車両を制御すること。
【解決手段】車両前方にある道路の勾配情報Kr,Prに基づいて、車両の運転者が道路の前方を見通せない区間(見通し不可区間)が車両前方に存在するか否かが判定され、見通し不可区間が存在すると判定された場合、勾配情報に基づいて見通し不可区間の終了地点(見通し地点Pm)が設定される。この見通し地点Pmと現在の車両位置Pvhとに基づいて、運転者に対する報知制御、車両の速度制御、及び、車両の操舵比制御のうち少なくとも1つ以上の制御が実行される。これらの制御実行に使用されるパラメータは、見通し地点Pmの前方にある道路のカーブ情報Rc,Pc、勾配情報に基づいて調整される。
(もっと読む)
自動走行解除装置
【課題】自動走行の解除時であっても運転者の加速意思を車両挙動に適切に反映させる。
【解決手段】自動走行解除装置10は、自動走行可能な車両に搭載され、自動走行の実行が設定された場合にフットレスト位置Prでのアクセルペダル反力を、フットレスト解除ペダル反力特性に応じたペダル反力より増大させ、アクセルペダルのペダルストローク位置がフットレスト位置Prから戻されたときに自動走行の実行を解除してフットレスト位置Prでのペダル反力をフットレスト解除ペダル反力特性に応じたペダル反力に戻し、この後、第1所定時間以内にアクセルペダルの再踏み込みによる運転者の加速意思を検出したときには、アクセルペダルのペダルストローク位置がフットレスト位置Prから戻されたときに解除された自動走行の実行時に駆動トルク特性として設定されていた自動走行時駆動トルク特性を、駆動トルク特性として再設定する。
(もっと読む)
車速制限解除時における自動変速機の変速制御装置
【課題】車速制限の解除時変速比変化幅が大きくても、車速制限解除ショックが大きくない変速制御の提案。
【解決手段】スロットル開度指令が車速制限解除時に車速制限用目標スロットル開度から運転者要求スロットル開度へと切り替わる場合、破線で示すごとくt1に、tTVO=LmtTVO対応の第7速から、tTVO=DrvTVO対応の第2速への飛び越し変速が生起される。この変速は、変速比変化幅が大きいために大きな変速ショックを生じさせる。そこで、車速制限解除時t1にLmtTVOからDrvTVOへ切り替わるtTVOの時間変化率ΔTVOを実線で例示するごとく制限し、当該変化率ΔTVOでLmtTVOからDrvTVOへ上昇するtTVOに基づく、車速制限解除時の変速制御により、実線で示すような、第7速から第2速への順次ダウンシフトを行わせる。これにより各変速の変速比変化幅が小さくなって変速ショックを軽減することができる。
(もっと読む)
運転支援装置、運転支援方法および運転支援プログラム
【課題】自動で減速を行うための制御を実施している過程にて当該自動制御を中止した場合であっても安定した走行を行わせること。
【解決手段】自車両の制御状態が自動制御に設定されている場合に、前記自車両の減速量を制御して前記自車両の車速を所定の目標車速まで減速させ、前記減速量を所定の基準に対応した変化量で変化させて前記自動制御から前記手動制御へ移行させる。
(もっと読む)
運転支援装置、運転支援方法および運転支援プログラム
【課題】減速をした後に加速する際にスムーズに加速することができなかった。
【解決手段】自車両の前方の所定区間を走行する際の目標車速を取得し、前記所定区間を走行した後に前記自車両を前記目標車速よりも大きい車速に加速させるための変速比である加速変速比を取得し、自動変速と手動変速とを設定するための変速設定部における設定内容を示す情報を取得し、前記変速設定部にて手動変速が設定されている場合には、前記所定区間の開始地点に到達する前に、当該加速変速比を示す案内を行う。
(もっと読む)
運転支援装置、運転支援方法および運転支援プログラム
【課題】運転者の意図を尊重しつつ、確実に目標車速まで減速する技術を提供する。
【解決手段】自車両の前方の所定位置における目標車速を取得し、前記目標車速まで減速させる際の、減速度が異なる複数の減速動作パターンを取得し、前記自車両の車速を制御するための運転操作に基づいて、前記複数の減速動作パターンの中から減速動作パターンを選択し、前記選択された減速動作パターンを基準にして前記所定位置に到達する以前に前記自車両の車速を前記目標車速まで減速させる。
(もっと読む)
シフトレンジ切替制御装置
【課題】シフトレンジを切り替えるための操作部の動きをロックさせる機構を追加することなく、運転不適状態の人が車両を走行させるのを防止する機能を、車両に持たせる。
【解決手段】運転者によるシフトレバーの操作に応じて、モータを駆動することにより、シフトレンジ切替機構を作動させて、自動変速機のシフトレンジを、そのシフトレバーの操作に対応したシフトレンジに切り替えるシフトバイワイヤ方式の制御装置では、車両のエンジンが始動された際に、運転者に対してアルコールチェックを行い(S120〜S140)、アルコール反応があった場合には(S140:YES)、切替許可/禁止フラグを禁止側に設定することで(S150)、シフトレンジをシフトレバーの操作に応じてパーキングロック(P)から他のレンジへ切り替える処理と、ニュートラル(N)から走行可能レンジ(D又はR)へ切り替える処理とを禁止する(S190:YES→S200)。
(もっと読む)
作業車両
【課題】エンジン負荷率とエンジン回転数との相関性を考慮して車速制御が可能な作業車両を提供すること。
【解決手段】エンジン62とミッションケース65内にギヤ噛合式変速装置を備え、エンジン62の回転数の上限値を最高車速に制限する制御中では、エンジン負荷率が90%又はその近傍の制限値を越える高負荷状態にある場合には、ギヤ式変速装置の減速比を変更する制御を行い、エンジン負荷率が所定の制限値を越えない余裕がある状態ではエンジン負荷率を下げることなくエンジン回転数が制限値を越えないように制御を行う制御装置100を備えた走行車両である。
(もっと読む)
車両の車速制限装置
【課題】車速制限動作を解除した際に運転者の意図に沿った加速を実現することができる車両の車速制限装置を提供する。
【解決手段】車速制限動作が解除された際のギヤ段への変速応答性を、車速制限動作が解除される直前のアクセル開度の変化割合dpapbfが第2の所定の変化割合X2よりも小さいとき(dpapbf<X2)に最も遅い第1の変速特性sftchar1に、車速制限動作が解除される直前のアクセル開度の変化割合dpapbfが第2の所定の変化割合X2よりも大きくかつ第3の所定の変化割合X3よりも小さいとき(X2≦dpapbf<X3)に第1の変速特性sftchar1よりも若干早い第2の変速特性sftchar2に、更に、車速制限動作が解除される直前のアクセル開度の変化割合dpapbfが第3の所定の変化割合X3よりも大きいとき(dpapbf≧X3)に最も早い第3の変速特性sftchar3にそれぞれ変更している。
(もっと読む)
制御装置
【課題】運転者に違和感を与えることなく、車速を運転者によって設定される制限車速以下に維持できる制御装置を提供する。
【解決手段】ASL設定中において、ダウンシフトとアップシフトとが連続的に実行され得る状態である「略制限状態」のときに限ってシフト動作を無効化する。第1判断部200では、減算部210で算出された制限車速に対する車速の偏差である車速余裕がしきい値Vth以下であれば、論理和部204への出力が活性化される。これに対して、第2判断部202は、減算部214で算出された制限スロットル開度に対するアクセルペダルベーススロットル開度の偏差である開度余裕がしきい値Tth以下であれば、論理和部204への出力が活性化される。第1判断部200および第2判断部202のいずれかにおいて略制限状態であると判断されると、無効化指令が活性化される。
(もっと読む)
車両の速度制限装置
【課題】キックダウンスイッチによるキックダウン判定により速度制限動作を解除する際の駆動力の急激な変化を簡単な制御系で円滑に緩和しつつ、運転者の体感的な不一致感を是正することができる車両の速度制限装置を提供する。
【解決手段】速度制限動作中に、キックダウンスイッチによりキックダウン判定され、かつ要求スロットル開度がスロットル開度センサによる実スロットル開度よりも大きければ、速度制限動作をオーバーライドさせ、それと同時に、現在のギヤ段から複数段下位のギヤ段への変更を禁止する一方、現在のギヤ段をシフトダウン変更線を一つずつ順に跨いで変速マップ通りに変更させる。
(もっと読む)
自動変速機の制御装置
【課題】所定のシフトアップ変速禁止条件が成立したときに、特定のギア段から所定のギア段へのシフトアップ変速を禁止するシフトアップ変速禁止制御を行う自動変速機の制御装置において、シフトアップ変速禁止制御を適正に解除する。
【解決手段】シフトアップ変速禁止条件が不成立となった後、車両の走行状態が、所定ギヤ段(例えば5速)へのシフトアップ変速線[4→5]以上であっても、入力トルク制限制御が実施されるときには、車両の走行状態がシフトアップ変速線[4→5]以下になるのを待たずに、シフトアップ変速禁止制御を解除して変速(4→5アップ変速)を実施する(ステップST13〜ST15)。このような解除制御によって、シフトアップ変速禁止制御が永続的に解除されないという不具合を解消することができ、例えば、高速道路等において運転者が望む車速で車両を走行させることが可能なる。
(もっと読む)
車両の制御装置、制御方法、その方法を実現するプログラムおよびそのプログラムを記録した記録媒体
【課題】自動変速機を備えた車両において、スムーズな変速を実現するとともに、車速が目標制限速度を超えることを抑制する。
【解決手段】ECUは、オートマチックトランスミッションがダウンシフト変速制御中であって(S100にてYES)、車速Vがしきい値より大きいと(S104にてYES)、エンジンの出力を低くすることにより車速を制限する車速制限制御を禁止する指令を出力するステップ(S106)と、変速中のダウンシフトに継続して新たなダウンシフトが実行されることを禁止するフラグをオンするステップ(S108)と、を含むプログラムを実行する。
(もっと読む)
作業車両のエンジン回転数制御装置
【課題】前後進の切り換え時に、オペレータが期待したとおりの低速速度段によるブレーキ効果が得られるようにする。
【解決手段】シフトレンジレバー8によって、作業に適した低速の変速範囲が選択されており、かつ、各速度段クラッチ21〜24のうち、選択された変速範囲の最高速度段に対応する速度段クラッチが係合されている場合に、当該最高速度段に対応する上限車速以下になるように、エンジン1の回転数を制限するスロットル量上限値が求められ、これがスロットル量修正指令信号としてエンジンコントローラ60に出力される。エンジンコントローラでは、トランスミッションコントローラ50から入力されたスロットル量上限値Smと、アクセルペダル11の踏み込み操作量としてのスロットル量Sとを対比して、いずれか小さい方のスロットル量を、修正されたスロットル量S´として生成し、これに応じた目標回転数が得られるように、エンジンを制御する。
(もっと読む)
車両の制御装置
【課題】他車両の周囲の障害物の有無に基づいて、自車両の挙動を制御することの可能な車両の制御装置を提供すること。
【解決手段】外部情報検出装置により他車両の自動変速機のシフト情報を検出するシフト情報検出手段(ステップS11,S12)と、他車両の自動変速機のマニュアルダウンシフトが検出された場合に、自車両の自動変速機の変速段を他車両の自動変速機の変速段と同一の変速段までダウンシフトすれば所定の車間距離を維持できるか否かを判断し、肯定された場合には、自車両の自動変速機の変速段を他車両の自動変速機の変速段と同一の変速段にダウンシフトし、否定判断された場合には、自車両の自動変速機の変速段を他車両の自動変速機の変速段よりも1段高い変速段にダウンシフトするとともに、他車両の減速を自車両の運転者に警告する挙動制御手段(ステップS13〜S15)とを備えている。
(もっと読む)
負荷制御装置
【課題】作業時にエンジンへの作業負荷が、適正負荷となるよう走行速度若しくはエンジン回転数が略一定になるように制御する。
【解決手段】エンジン4の出力軸とPTO軸11との間にPTOクラッチ38を配置し、
該PTOクラッチ38を断接可能とする手段と、走行速度を検知する手段と、エンジンの回転数を検知する手段と、エンジン回転数設定手段と、変速変更手段等を制御手段としてのコントローラ20と接続し、前記PTOクラッチ断接手段をONとしたとき、負荷の変動に対して、走行速度を変更して、エンジン回転数を略一定に保つように制御した。
(もっと読む)
1 - 20 / 23
[ Back to top ]