
Fターム[3J552RB26]の内容
伝動装置(歯車、巻掛け、摩擦)の制御 (81,513) | 車両走行状態 (2,755) | 低μ路走行時(雪,アイスバーンなど) (59)
Fターム[3J552RB26]に分類される特許
1 - 20 / 59
車両制御装置
【課題】車両制御装置において、作動流体の無駄な供給を抑制して燃費の向上を可能とする。
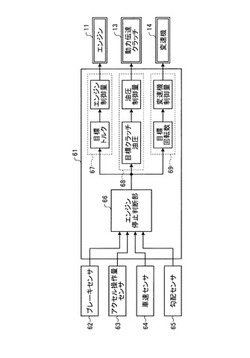
【解決手段】車両に搭載されたエンジン11にトルクコンバータ及び動力伝達クラッチ13を介して変速機14を連結し、この変速機14に減速・差動機構を介して駆動輪を連結し、エンジン停止許可条件が成立したかどうかを判定するエンジン停止判断部66と、エンジン停止許可条件が成立したときにエンジン11を自動停止可能なエンジン制御部(自動停止手段)67と、エンジン制御部67によりエンジン11が自動停止したときに車速に応じて変速機14の制御油圧を調整する変速機制御部69を設ける。
(もっと読む)
車両の走行制御装置

【課題】最大駆動力の比較的小さい車両であって、走行モードとして複数のモードを有している場合に、各走行モードでの駆動力特性に差を設ける。
【解決手段】運転者が走行モードとしてS(ノーマル)モード或いはI(エコノミー)モードが選択されている場合は、目標駆動力に基づいてエンジン制御と変速制御を行う。一方、走行モードとしてS#(スポーツモード)が選択されている場合、エンジン制御と変速制御とは独立となり、エンジン制御はアクセル開度APとエンジン回転数Neとに基づき、S#モードマップを参照して目標トルクτeを設定し(S12)、この目標トルクτeに対応する目標スロットル開度を設定する(S13)。又、変速制御は車速Vspとスロットル開度SVとに基づき目標変速段を設定する(S31)。
(もっと読む)
車両用駆動装置の制御装置
【課題】エンジンからの動力を駆動輪へ出力し差動用電動機により差動状態が制御される差動機構を備えた車両用駆動装置において、車両のスリップ時にも非スリップ時にもエンジンの駆動制御を適切に行うことができる車両用駆動装置の制御装置を提供する。
【解決手段】ハイブリッド制御手段86は、基本的には、出力回転部材19の実回転速度である差動部実出力回転速度に基づいてエンジン8を制御する。そして、車両6のスリップ時には、上記差動部実出力回転速度に替えて、実際の車速Vに対応する車速基準出力回転速度に基づいてエンジン8を制御する。従って、上記スリップ時にエンジンパワーが不必要に大きくならないようにエンジン8の駆動制御を適切に行うことができる。また、基本的にはエンジン8は出力回転部材19の実回転速度に基づいて制御されるので、車両6のスリップ時以外でもエンジン8の駆動制御を適切に行うことができる。
(もっと読む)
ハイブリッド車両の制御装置
【課題】 駆動輪スリップが生じた場合であっても、車両としての走行性や安定性が確保可能なハイブリッド車両の制御装置を提供すること。
【解決手段】 モータと駆動輪との間に介装されたクラッチをスリップ制御すると共に、モータをクラッチの駆動輪側回転数よりも所定量高い目標モータ回転数となるように回転数制御する走行モードのときに、車体速に所定スリップ量を加算した目標モータ回転数の上限回転数を設定することとした。
(もっと読む)
車両用発進制御装置
【課題】駆動トルク抑制の制御など、従来の一方向のみの制御方法では効果が及ばず、やむを得ずスタックしてしまった車両を、新規の手段で脱出可能とする制御装置を提供すること。
【解決手段】スタックしてしまった車両を、まず前進駆動させ(S102)、車体移動状態判定手段により、前進パルスの立ち上がりがなければ(S106)後進駆動に切り替え(S108)後進させ、同じように後進パルスの立ち上がりがなければ(S110)S102に戻り前進駆動させる。
(もっと読む)
惰行制御装置
【課題】低μ路走行時の惰行制御が回避できる惰行制御装置を提供する。
【解決手段】車両が低μ路走行中であることを認識する低μ路走行認識部4と、前記低μ路走行認識部により車両が低μ路走行中であることが認識されているときは惰行制御を禁止する低μ路走行中惰行制御禁止部5とを備える。
(もっと読む)
制動制御システム
【課題】制動制御を行うときの車両の安定性を向上させることができる制動制御システムを提供すること。
【解決手段】車両の全車輪にそれぞれ配置された制動装置が車両に作用させる制動力である第一制動力、あるいは車両の動力源を車両の駆動輪に対する負荷とすることで車両に作用させる制動力である第二制動力の少なくともいずれか一方により車両を制動する制動制御システムであって、車両に要求される減速度である要求減速度を実現するときに車両に作用させる制動力における第一制動力と第二制動力との割合が、車両の挙動安定性に影響する走行環境(S510,S530,S540)に応じて変化する(S520,S550)。
(もっと読む)
走行支援装置、方法およびプログラム
【課題】走行安定性を低下させることなく目標位置において目標車速以下となるように走行支援を行うこと。
【解決手段】車両の前方に存在する目標位置および当該目標位置における目標車速を示す情報を取得し、前記車両の前方に存在する路面の摩擦度合が所定の基準より小さい低摩擦区間の長さを示す情報を取得し、前記車両の現在位置と前記目標位置との間に前記低摩擦区間が存在する場合、前記車両の現在位置と前記目標位置との間に前記低摩擦区間が存在しない場合に前記目標位置において車速を前記目標車速以下にさせる走行支援を行う際の走行支援開始位置よりも、前記低摩擦区間の長さだけ車両側の位置から前記走行支援を開始するとともに、前記低摩擦区間においては前記走行支援を中断する。
(もっと読む)
車両の運動制御装置
【課題】車両の操作状態量や運動状態量を検知するセンサからの信号が異常な場合にも、運転者に違和感を与えない車両の運動制御装置を提供する。
【解決手段】車両の運動制御装置は、コントロールユニット37、並びに、センサ2,3,4,30,31,32,33等を含んで構成されている。実状態量取得部52は、実車体横滑り角βz_act、実ヨーレートγactを偏差演算部55に入力する。規範動特性モデル演算部54は、動特性モデルを用いて、規範車体横滑り角βz_d、規範ヨーレートを算出して偏差演算部55に入力する。仮想外力演算部61は、偏差演算部55から出力される偏差にもとづいて、規範動特性モデル演算部54に仮想外力Mvをフィードバックする。このとき、仮想外力演算制御部62が、前記したセンサからの信号の検知状態にもとづいて、仮想外力の補正を制御する。
(もっと読む)
差動装置の保護装置
【課題】 低摩擦係数路面を短時間で確実に判定して差動装置の保護を図る。
【解決手段】 シフトアップ制限手段M5は、左右車輪速差算出手段M3で算出した左右の駆動輪WFL,WFRの車輪速差が第1閾値以上になったときに、自動変速機Tのシフトアップを制限して差動装置Dを保護する。前後車輪速差算出手段M2が算出した駆動輪WFL,WFRおよび従動輪WRL,WRRの車輪速差が第2閾値以上になると、つまり路面摩擦係数が低いことが確認されるとシフトアップ制限手段M5が第1閾値を引き下げるので、駆動輪WFL,WFRのスリップ量が大きくなる前にシフトアップを制限して差動装置Dを確実に保護することができる。一方、その分だけ第1閾値を高めに設定することができるので、ドライ路面で不必要なシフトアップの制限が行われてしまうのを未然に防止することができる。
(もっと読む)
車両用駆動力制御装置
【課題】駆動要求操作に対する動力源の回転数変化を抑制することのできる車両用駆動力制御装置を提供すること。
【解決手段】動力源と動力伝達機構とを備え、駆動力を要求する駆動力要求操作の操作量が所定の変化幅の範囲内にある場合に、その操作量に対する動力源の回転数変化が抑制される車両用駆動力制御装置において、駆動力要求操作の操作量が増加から減少あるいは減少から増加に転じた時点の操作量を保持する操作量保持手段(ステップS10)と、一回前に保持された操作量を基準として駆動力要求操作の操作量に対する動力源の回転数変化を抑制する変化幅を算出する変化幅算出手段(ステップS5およびステップS6)とを備え、駆動力要求操作の操作量が変化幅の範囲内にある場合に、保持された操作量が動力源あるいは動力伝達機構に対して出力される(ステップS11)。
(もっと読む)
車両の制御装置
【課題】自動変速機の負荷を低減するとともに、操作に対する車両の追従性を向上させることができる車両の制御装置を提供する。
【解決手段】CPUは、シフトレバーの操作位置に対応するシフトレンジが、RレンジからDレンジに切り替えられ、かつ、車輪速Vwと実車速Vとの差分(Vw−V)がスタック判定値Vsよりも大きければ(ステップS13でYES)、ブレーキ装置の作動を禁止するとともにC1クラッチを係合させ(ステップS14、S15)、上記差分(Vw−V)がスタック判定値Vs以下であれば、実車速Vがブレーキ制御判定車速Vαよりも大きいと判定する限り、車両の制動を継続する(ステップS17)。CPUは、実車速Vがブレーキ制御判定車速Vα以下であると判定した場合には(ステップS16でNO)、ブレーキ装置の作動を解除する(ステップS18)とともにC1クラッチを係合させる(ステップS15)。
(もっと読む)
車両の動力伝達制御装置
【課題】動力源として内燃機関と電動機とを備えた車両に適用される車両の動力伝達制御装置であって、車両発進時に使用される電動機接続状態を適切に選択し得るものの提供。
【解決手段】この装置は、電動機出力軸の接続状態を、変速機の入力軸と電動機出力軸との間で動力伝達系統が形成される「IN接続状態」、及び、変速機出力軸と電動機出力軸との間で動力伝達系統が形成される「OUT接続状態」に選択可能な切替機構を備える。車両が走行状態から停止状態に移行した後において停止状態から車両が発進する場合、停止状態(路面勾配、前後加速度、路面摩擦係数、積載量等)、又は、停止状態に移行する前の走行状態(走行抵抗トルク等)に応じて、発進時の電動機接続状態が選択される。停止状態、又は停止状態に移行する前の走行状態に応じて、要求(或いは、許容)される駆動トルクの大きさに応じた適切な発進時の電動機続状態が選択され得る。
(もっと読む)
自動変速機の制御装置
【課題】急制動時に自動変速機に作用する過大なイナーシャトルクを抑制することによって自動変速機の耐久性を向上させる。
【解決手段】ベルト式無段変速機を制御するECUは、実車速がしきい値よりも低く(S100にてYES)、低μ路で駆動輪が空転している状態で(S102にてYES、S104)、運転者がブレーキペダルを踏んだ場合(S106にてYES)、変速比を所定値だけ減少させるアップシフト制御を行なう(S108)とともに、ベルト挟圧力を所定値だけ増加させる挟圧増加制御を行なう(S110)。
(もっと読む)
動力伝達装置
【課題】無段変速機を搭載する車両において、駆動輪の回転速度の急変に対してより適切に対処する。
【解決手段】駆動輪に空転によるスリップが発生したときには、CVTのインプットシャフトの回転変化量ΔNiに設定値Nsetを加えたものを許容回転変化量ΔNi*に設定し(S130,S150,S160)、要求回転速度Ni*とインプット回転速度Niとの偏差(N*−Ni)が許容回転変化量ΔNi*の範囲内となるよう目標回転速度Ni*を設定してCVT50を制御する(S170〜S210)。これにより、スリップの発生により駆動輪の回転速度(アウトプット回転速度No)が急上昇しても、インプット回転速度Niを追従させることができ、アップシフトへの移行を抑制することができる。
(もっと読む)
動力伝達装置
【課題】無段変速機を搭載する車両において、駆動輪の空転によるスリップが解消した後の走行性能の低下を抑制する。
【解決手段】駆動輪の両輪の空転によるスリップが発生したとき、車速Vが所定車速Vref以上のときにはアクセル開度Accと車速Vとに基づいて変速マップを用いて目標回転速度Ni*を設定し(S120,S150,S130)、車速Vが所定車速Vref未満のときにはスリップが発生したときに発生時点で設定されている変速比が保持されるよう目標回転速度Ni*を設定し(S180,S190)、エンジン回転速度制限要求がなされているときには制限変速比γrefを下回らない範囲内で制限回転数Nelimを目標回転速度Ni*に設定して(S200〜S240)、CVTを制御する。
(もっと読む)
ハイブリッド車両の制御装置
【課題】変速を伴う走行時、車両性能の低下を抑制しつつ、変速中の駆動力低下やショックの発生を回避することで、車両の運転性能を向上させることができるハイブリッド車両の制御装置を提供すること。
【解決手段】エンジンENGからの出力軸が動力分配機構T/Sを経て第1モータ/ジェネレータMG1と駆動輪LT,RTに連結され、第2モータ/ジェネレータMG2の出力軸が変速機T/Mを介して駆動輪LT,RTに連結され、変速指令時に変速機T/Mの変速比を変更制御する。このFRハイブリッド車両において、変速機T/Mよりも駆動輪LT,RTに連結される第3モータ/ジェネレータMG3と、変速中、第2モータ/ジェネレータMG2の駆動力低下分による必要補償駆動力を推定し、変速開始域は、第3モータ/ジェネレータMG3が補償駆動力を供給し、その後、車両性能への影響が大きい場合は、第3モータ/ジェネレータMG3が負担する補償駆動力の一部を、エンジンENGの駆動力で補償する変速中駆動力補償制御手段(図4)と、を有する。
(もっと読む)
車両の駆動力制御装置
【課題】 路面の状態を精度良く判定して車両の駆動力を制御することで、車輪のスリップを確実に抑制する。
【解決手段】 第1低摩擦係数路面判定手段で全車輪の車輪速のうちの最高車輪速および最低車輪速から低摩擦係数路面を判定し、第2低摩擦係数路面判定手段で前輪の車輪速および後輪の車輪速から低摩擦係数路面を判定し、第3低摩擦係数路面判定手段で左駆動輪の車輪速および右駆動輪の車輪速から低摩擦係数路面を判定し、第4低摩擦係数路面判定手段でエンジンの駆動力から算出した規範車体加速度をディファレンシャルギヤの回転数から算出した実車体加速度と比較して低摩擦係数路面を判定し、かつ統合低摩擦係数路面判定手段で第1〜第4低摩擦係数路面判定手段の判定結果に基づいて低摩擦係数路面を統合判定するので、第1〜第4低摩擦係数路面判定手段の各々の長所を活かして短所を補いながら低摩擦係数路面を精度良く判定することができる。
(もっと読む)
車両の変速制御装置
【課題】 低摩擦係数路面で後進走行レンジから前進走行レンジにシフトチェンジする際に、前後進切替機構のスムーズな作動および保護を図る。
【解決手段】 リバースレンジにおいて駆動輪のスリップ状態が検出された後に、リバースレンジからDレンジにシフトチェンジされたとき、1速ドリブンギヤをカウンタシャフトに結合すべくチャンファ機構の油圧サーボに供給する液圧を基準液圧よりも加算値QINGICEだけ増圧するとともに、液圧サーボに液圧を供給するタイミングΔTだけ早めるので、路面摩擦係数が小さいために、Dレンジにシフトチェンジした後にチャンファ機構の差回転がゼロになるタイミングが早まっても、そのタイミングに合わせてチャンファ機構を早期に作動させることが可能となり、1速変速段のスムーズな確立とチャンファ機構の耐久性向上とか可能となる。
(もっと読む)
ハイブリッド車両の制御装置
【課題】運転者の操作以外のトルク制御を行なうものにおいて、運転者の意図と異なるトルク変化に応じて、変速種が変更されることを抑制し、変速種の変更を原因とする変速ショックの発生や変速時間が長くなることを抑制し、運転者に違和感を与えることを抑制可能なハイブリッド車両の制御装置を提供すること。
【解決手段】エンジンEngおよびモータジェネレータMGを有段の自動変速機ATの入力側に有し、自動変速機ATは、変速中に正駆動トルクを伝達する場合と、負駆動トルクを伝達する場合とでトルクを受け止める締結要素が異なる構造であり、ATコントローラ7は、自動変速機ATへの入力トルクが、運転者の操作に応じて決定されている場合と、駆動輪スリップ抑制制御に基づいて決定されている場合とで、変速種の選択判定基準を変更する変速種決定処理を行なうことを特徴とするハイブリッド車両の制御装置とした。
(もっと読む)
1 - 20 / 59
[ Back to top ]