
Fターム[3J552SB39]の内容
伝動装置(歯車、巻掛け、摩擦)の制御 (81,513) | 変速比,変速時期 (4,490) | 同期に関する制御 (373) | 同期機構を用いるもの (171) | 加速装置を用いるもの (46)
Fターム[3J552SB39]に分類される特許
1 - 20 / 46
ハイブリッド車両の制御装置
【課題】変速機の変速時間を短縮しつつシンクロ機構に対する負荷を抑えることができるハイブリッド車両の制御装置を提供する。
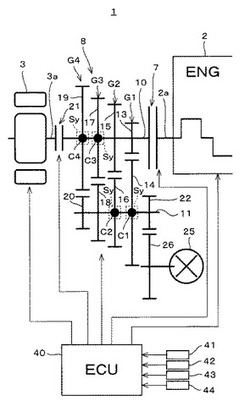
【解決手段】本発明の制御装置は、AMT8の変速操作開始時に入力軸10の回転速度が目標回転速度に近づくように、モータ・ジェネレータ3のトルクが切替機構21を介して前記入力軸に伝達可能な状態でモータ・ジェネレータ3を制御し、入力軸10の回転速度と目標回転速度との差が閾値を下回った場合に、モータ・ジェネレータ3と入力軸10との間のトルク伝達が遮断されるように切替機構21を制御し、そのトルク伝達が遮断されてからAMT8の変速操作が開始されるようにAMTを制御する。
(もっと読む)
ハイブリッド車両の変速制御装置

【課題】電動機のトルクを入力軸に迅速に付加でき、かつ変速機に設けられているシンクロ機構の負荷を低減可能なハイブリッド車両の変速制御装置を提供する。
【解決手段】マニュアル式の変速機10を備えたハイブリッド車両1に適用される変速制御装置において、変速機10に対してギア段の切り替えが要求された場合、まず最高段を目標ギア段に設定するとともに最高段の変速比に基づいて目標回転数を設定する。次に第2クラッチ31を入力軸係合状態に切り替えて入力軸11にトルクを付加するトルク付加処理を実行する。その後、目標ギア段が要求ギア段と一致しているか否か判定する判定処理を実行する。判定処理で不一致と判定した場合は第2クラッチ31を入力軸係合状態に維持し、目標ギア段及び目標回転数を再設定する再設定処理を実行する。そして、目標ギア段と要求ギア段とが一致するまでトルク付加処理、判定処理、及び再設定処理を繰り返し実行する。
(もっと読む)
動力伝達装置
【課題】有段変速機の変速段を現変速段から次変速段に変更する場合に、エンジンから有段変速機を介して駆動軸へ伝達される動力の遮断または減少が生じる期間を短くする。
【解決手段】有段変速機44の変速段を現変速段から次変速段に変更する場合に、現変速段に対応する係合状態のm速係合部材64−mと出力側係合部材64−5(あるいは入力側係合部材64−7)を解放したら、ロータ巻線30の交流電流により入力側ロータ28から出力側ロータ18に電磁カップリングトルクTcoupを作用させることで、出力側ロータ18及び入力軸61の回転速度Nmgを変化させる。これによって、入力軸61に作用させるトルクを大きくすることができ、入力軸61の回転速度Nmgを次変速段に対応する目標入力軸回転速度Nrefnまで変化させるのに必要な所要時間を短くすることができる。
(もっと読む)
ギア変換のための方法および伝動装置配置構造物
【課題】本発明は、液圧伝動装置およびその下流に連結した手動ギアボックス(4)を有する伝動装置においてギアを変換するための、方法および伝動装置配置構造物に関するものである。
【解決手段】最初に、液圧モータ(9)の出力トルクが減少させられる。液圧モータ(9)の出力トルクの減少の後、下流で連結していた、手動ギアボックス(4)の係合していたギア(12、13)の係合が外される。係合しようとしているギア(13、12)に相当する、液圧モータ(9)の出力回転速度が決定される。次に、液圧伝動装置の歯数比を調節し、液圧モータ(9)の出力回転速度が、決定された相当出力回転速度より高くなるようにする。この増加させられた出力回転速度に到達した後、係合しようとしていたギア(13、12)を係合する。
(もっと読む)
ハイブリッド車両の制御装置
【課題】ワンウェイクラッチを経て伝動を行う変速段で惰性走行から加速に移行した時の加速応答を改善し、ワンウェイクラッチ係合ショックを軽減することができるハイブリッド車両の制御装置を提供する。
【解決手段】惰性走行開始時t1から加速操作時t2まで間、モータトルク目標値tTmを、ワンウェイクラッチの入力側回転数Nowciが出力側回転数Nowcoに接近して両者の回転差が目標値tΔNowc=-50rpmとなるようtTmslipとなす。よって、t2にNowciとNowcoとの回転差が小さくされ、t2〜t3の加速遅れを短縮し得ると共に、t3の直後におけるワンウェイクラッチ係合ショックを小さくし得る。更に、t2以後tΔNowcが-50rpmから徐々に0になるようにし、これが実現されるようtTm=tTmslipにするため、ワンウェイクラッチ係合ショックを更に確実に緩和し得る。
(もっと読む)
車両用モータ駆動装置および自動車
【課題】現変速段の2ウェイローラクラッチと次変速段の2ウェイローラクラッチとが二重係合するのを確実に防止することが可能な車両用モータ駆動装置を提供する。
【解決手段】1速摩擦板52aに1速側の係合凸部66aを設け、シフトリング51に係合凹部を設け、この1速側の係合凸部66aと係合凹部は、シフトリング51が1速シフト位置にある状態では互いに係合して1速摩擦板52aに対するシフトリング51の相対回転を規制するように形成し、シフトリング51の内周に突片を設け、出力軸22の外周に切欠きを有する環状突出部を設け、この突片と環状突出部は、突片が環状突出部の切欠きを軸方向に抜け出しかつ突片の位置と環状突出部の切欠きの位置が周方向にずれた状態では、突片が環状突出部に干渉することで、1速シフト位置と2速シフト位置の間でのシフトリング51の軸方向移動を規制するように形成する。
(もっと読む)
車両の変速制御装置
【課題】自動変速機の変速過程のイナーシャフェーズにおける変速ショックの低減と応答性の向上との両立を図る。
【解決手段】モータを有する駆動源と駆動輪との間に有段式の自動変速機を介装する。この自動変速機による変速時には、摩擦締結要素の掛け替えを行うとともに、イナーシャフェーズでは、モータを目標回転数へ向けて回転数制御する。車速変化により変速が行われる第1変速パターンでは、変速ショックを低減するように、目標回転数の変化率を低く制限し(ステップS17,S19)、運転者のアクセル操作により変速が行われる第2変速パターンでは、応答性を重視して、第1変速パターンよりも目標変化率の変化率を高くする(ステップS18,S20,S21)。
(もっと読む)
電動機制御システム、発電機制御システム、及び電動発電機制御システム
【課題】モータジェネレータ2を効率の高い領域で動作させ、効率を向上させる。
【解決手段】駆動発電制御システム1の駆動発電制御ユニット8には、モータジェネレータ2の効率に基づいて設定された回転数Nと目標トルクTcとに対応する発生トルクTpが記憶される。発生トルクTpは、効率の高い運転領域又は当該運転領域の近傍のトルクである。駆動発電制御ユニット8は、回転数Nと目標トルクTcとに対応する発生トルクTpを決定して、発生トルクTpに対する目標トルクTcの割合に応じて、モータジェネレータ2が発生トルクTpを連続的又は間欠的に発生するように動作させる。これにより、モータジェネレータ2は、発生トルクTpを連続的又は間欠的に発生して車両の走行又は制動に必要な目標トルクTcをプロペラシャフト14に供給する。
(もっと読む)
ハイブリッド車両の制御装置
【課題】ツインクラッチで吸収されるエネルギーを少なくして、ツインクラッチの耐摩耗性や耐熱性を向上できるハイブリッド車両の制御装置を提供する。
【解決手段】噛み合い式クラッチS1〜S4によるプリシフトを実施する際に、最外駆動軸15の回転数を上昇させるために必要なエネルギーを、切り替えられる第1クラッチCL1の容量制御によってエンジン側から得ると共に、それによって発生した駆動力損失分をスタータジェネレータSGを駆動することでプリシフトトルクとして補填するハイブリッド車両の制御装置であって、プリシフト完了後にイナーシャ相に移行して、前記第2クラッチCL2のクラッチ容量を減少させつつエンジンEによりスタータジェネレータSGで発電を行い、またはバッテリ7によりスタータジェネレータSGを駆動してエンジンEを駆動補助することでエンジン回転数を次段目標回転数に近づける。
(もっと読む)
同期噛合式変速機の変速装置及びその変速方法
【課題】同期噛合式変速機の変速装置の変速時間を短縮する。
【解決手段】変速機コントロールユニットが、変速指令があったときに、変速すべき目標変速段のシンクロメッシュ機構を作動させて変速動作を行うと共に、目標変速段以外の少なくとも1つの他の変速段のシンクロメッシュ機構を作動させて、他の変速段のコーン面にシンクロナイザリングを押圧させるように、アクチュエータの駆動を制御する(S2)。この押圧は、カウンタシャフトの回転速度Ncと、目標変速段への変速完了時におけるカウンタシャフトの予測回転速度Npcとの差分の絶対値が所定値以下になるまで継続される(S3〜S5)。所定値以下となったとき、他の変速段のコーン面に対するシンクロナイザリングの押圧を解除するように、アクチュエータの駆動を制御する(S6)。
(もっと読む)
変速機およびその制御方法
【課題】スプラインクラッチは大トルク容量の変速機の好適であるが、スプラインの隙間が小さいので同期締結の際、位相をぴったり合わさないと嵌合しにくい。
【解決手段】そこで嵌合案内歯付きのスプラインクラッチを用いて、部品点数やコストを抑え、磨耗部品がなくメンテナンスの手間を増やさずに、高速締結できるようにする。耐久性を損なわないように中間軸の速度を制御できる方式と組み合わせることで、高速に動作して信頼性の高い変速機を提供する。
(もっと読む)
ハイブリッド駆動機構を有する自動車用のツインクラッチトランスミッションと、このツインクラッチトランスミッションを制御するための方法
【課題】スペース、コスト及び整備費用を最小化し、快適なギヤチェンジと走行性が得られるように、ツインクラッチトランスミッションと、これを制御するシステムを提供する。
【解決手段】入力軸2がクラッチK1を介して、入力軸3がクラッチK2を介して、クランクシャフトと結合可能であり、繋脱が可能な複数のギヤI,II,III,IVが設けられており、電動機5が、電気モータ5a又はジェネレータ5bとして運転可能であり、電動機10、電気モータ10a又はジェネレータ10bとして運転可能であり、電動機5が入力軸2と、電動機10が入力軸3と、結合可能である、入力軸2と入力軸3を有するツインクラッチトランスミッション1において、電動機5,10によって、ギヤチェンジの際に同期すべきトランスミッション入力軸2,3を相応に同期可能にする。
(もっと読む)
入力シャフトおよびエンジン速度同期を備える伝動機構と伝動機構のギヤシフト方法
本発明の駆動系は、原動機と、トランスミッションと、前記原動機と前記トランスミッションとの間でトルクを伝達するのに適した入力シャフトと、前記トランスミッションと駆動系との間でトルクを伝達するのに適した出力シャフトと、前記原動機と前記入力シャフトとの間のマスタクラッチであって、それぞれ、前記原動機と前記入力シャフトとの間でトルクを伝達しない、またはトルクを伝達するのに適した解離位置と嵌合位置との間で移動可能であるクラッチと、を含む。電動モータは前記入力シャフトと前記出力シャフトの少なくとも一方とのトルク伝達のために配置されており、そして制御装置は前記クラッチが前記解離位置から前記嵌合位置へ移動した時に、前記原動機の作動範囲内の回転速度で前記入力シャフトを回転させるように前記電動モータを制御するため設けられている。 (もっと読む)
車両の制御装置および制御方法
【課題】回転電機の回転を変速機で変速して車輪軸に接続された出力軸に伝達する車両において、ダウンシフト時の変速品質を確保する。
【解決手段】ECUは、出力軸回転数NOUTがダウン線よりも低下した場合(S102にてYES)、ダウン線が通常ダウン線よりも高速側の高車速ダウン線であり(S104にてYES)、かつアクセルオフ状態(S106にてYES)であり、かつ蓄電装置の充電量SOCがしきい値よりも低いと(S108にてYES)、回転電機および変速機のオイル流量を低減するように、機械式オイルポンプの動力源であるエンジン回転数NEあるいは電動オイルポンプの回転数NPを低下させ(S112〜S116、S118〜S122)、その後に回転電機の回転数NM(2)をダウンシフト後の同期回転数まで増加させてダウンシフトを実行する(S124〜S130)。
(もっと読む)
ハイブリッド電気自動車の制御装置
【課題】電動運転モードからエンジン運転モードへの移行時に、駆動輪におけるトルク変動を有効に抑制し得るハイブリッド電気自動車の制御装置を提供する。
【解決手段】自動車10の変速機16は、エンジン12が停止時には、ドライブ・ギアからニュートラル・ギアにシフトする。エンジンが回転上昇する際には、エンジン12のクランクシャフト18は所望の回転速度まで回転させられ、変速機16はニュートラル・ギアから、シフト・スケジュールに基づく適切な変速ギアにシフトする。変速機16の目標入力速度は、電動運転モードからスムーズに離脱すべく、同期速度にオフセット値を加えた速度となるように指令される。
(もっと読む)
電気駆動部を有する自動車において負荷切換を実施するための方法
本発明は、負荷切換変速機を有する電気自動車において、あるいは、純粋な電気走行運転時のハイブリッド変速機を有するハイブリッド自動車において、負荷切換を実施するための方法に関する。新しいギヤ段への同期のために必要な電気機械の回転数適合が、回転数調整モードにおいて実施される。  (もっと読む)
(もっと読む)
パーキング機構の制御装置
【課題】アクチュエータの応答速度が遅い場合であっても、確実にパーキングレンジに切り替えることができるパーキング機構の制御装置を提供する。
【解決手段】ハイブリッド用電子制御ユニットのCPUは、ハイブリッド自動車が坂路にあると判定した場合(ステップS1でYESの場合)、パーキングギヤの回転位置を検出し(ステップS3)、パーキングギヤの回転位置に基づいて、出力した信号に応答してアクチュエータがパーキングポールをロック位置に移動させたときにパーキングギヤとパーキングポールが噛み合うようにモータを回転させる(ステップS4)。
(もっと読む)
ハイブリッド車両の制御装置
【課題】 急激なトルク増大要求があった場合でも、変速機入力軸回転数の上昇によって同期させつつトルク増大応答遅れを回避したハイブリッド車両の制御装置を提供する。
【解決手段】 ダウンシフト時に、前記変速機の入力軸回転数が変速完了後の同期回転数まで上昇するように前記変速機の入力軸トルクを制御する入力トルク制御手段を設け、前記入力トルク制御手段は、前記ダウンシフト時にエンジントルクを制御するエンジントルク制御手段と、前記ダウンシフト時にモータジェネレータトルクを発生させて前記変速機の入力軸トルクを略ゼロに維持するモータトルク制御手段とを有することとした。
(もっと読む)
ハイブリッド車両の変速制御装置
【課題】ハイブリッド車両における自動変速機の変速が、引き込みショックやエンジンの空吹けを生ずることなく行われるようにした変速制御装置を提案する。
【解決手段】電気走行(EV)→ハイブリッド走行(HEV)モード切り替え(エンジン始動)要求時t1に、解放側摩擦要素作動圧Poをスリップ維持圧へ低下させて、変速機入力回転数をモータ/ジェネレータで変更可能にする。Po=スリップ維持圧となるt2に目標モータ/ジェネレータ回転数tNmをエンジン始動回転数Nesへ上昇させ、エンジンをモータ/ジェネレータで始動させる。ダウンシフト要求時t3に締結側摩擦要素作動圧Pcをリターンスプリング相当圧へ上昇させる。エンジン始動判定時t4にtNmを(変速後入力回転数Ninext+所定値α)へと上昇させ、これに追従するモータ/ジェネレータ回転数Nm(エンジン回転数Neと同じ)がNinextに達するt5に、解放側摩擦要素作動圧Poを0に向け低下させると共に締結側摩擦要素作動圧Pcを上昇させることでダウンシフトを遂行させる。
(もっと読む)
車両の駆動制御装置
【課題】遊星伝達機構とフライホイールとを含むゼロイナーシャユニットを備える構成において、フライホイールの回転時の空気抵抗を増すことなく、フライホイールの回転速度を確実に検出できるようにすること。
【解決手段】ゼロイナーシャユニットは、フライホイール25と、遊星ギヤ機構とを含んでいる。遊星ギヤ機構は、エンジンの出力軸に連なるリングギヤと、駆動輪に連なるキャリアと、フライホイール25と連動して回転するサンギヤとを含んでいる。フライホイール25の外径部52の一側面52aは、フライホイール25の回転速度ωfを電磁的に検出するためのフライホイール回転速度センサ47に対向している。この一側面52aに、フライホイール回転速度センサ47のための被検出部56が面一に配置されている。
(もっと読む)
1 - 20 / 46
[ Back to top ]