
Fターム[4E068CA12]の内容
Fターム[4E068CA12]に分類される特許
141 - 144 / 144
マイクロおよびナノ構造のレーザ加工用の近接場走査型光学顕微鏡
超高速レーザ源を用いて、表面上に要素をレーザ加工するための近接場走査型光学顕微鏡(NSOM)レーザマイクロ加工システムおよび、そのような要素をレーザ加工する方法。システムは、1ns未満のパルス期間およびピーク波長を有するレーザ光パルスを生成する超高速レーザ源と、実質的に円柱形状を有するNSOMプローブと、NSOMプローブおよび加工されるマイクロ構造ワークピースを制御可能に保持なNSOMマウントと、NSOMプローブのプローブチップと表面との間の距離を決定するための、NSOMマウントに結合されたNSOMプローブモニタと、NSOMプローブモニタおよびNSOMマウント中の移送台に結合されたNSOM制御とを有する。NSOMマウントは、XY移送台およびZ移送台を有する。これらの移送台がNSOMプローブまたはマイクロ構造ワークピースに結合され、あるいは1つの移送台が各々に結合される。 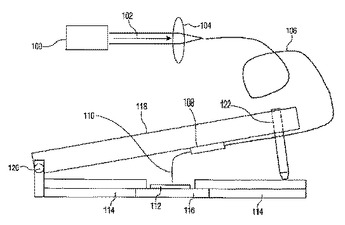 (もっと読む)
(もっと読む)
レーザ、制御装置、遠隔制御装置、およびレーザ加工する方法
レーザ加工ヘッドを遠隔操作する制御装置は、レーザ加工ヘッドとレーザ加工ヘッドから離れた位置にある作動手段を含む。変換手段は、レーザ加工ヘッドと作動手段との間に接続される。変換手段は、作動手段の動作をレーザ加工ヘッドの動作に変換する。変換手段は、レーザ加工ヘッドに連結される第1端部と、作動手段に連結される第2端部とを有するケーブル制御手段を含む。レーザ加工ヘッドは、ロボットアームに滑走可能に連結されている。作動手段は、レーザ加工ヘッドをロボットアームに対して相対的に直線状に動かす。高さセンサ装置は、レーザ加工ヘッドと加工製品との間の測定に基づいて高さ信号を生成する高さセンサを含む。高さセンサ電子回路部は高さセンサから離れた位置にあり、高さ信号を受信する。 (もっと読む)
キャビティを生成する方法および装置
本発明は、工作物にキャビティを生成する方法に関する。この方法では、キャビティを生成するために、レーザビームをビームガイドに通して、工作物の表面に案内する。レーザビームは、焦点位置をキャビティの深さ方向に少なくとも一時的に変更できるように制御されている。工作物(5)にキャビティ(6)を生成する装置は、物質を除去するレーザビームを生成するレーザ光源(1)、レーザビームの焦点位置を調節する焦点調節装置(3)、工作物の表面にレーザビーム(20)を案内するビームガイド(4)、および焦点調節装置(3)ならびにビームガイド(4)を制御する制御装置(7)を含む。制御装置は、焦点調節装置(3)によって、レーザビームの焦点位置をキャビティの深さ方向に少なくとも一時的に変更可能とする制御を行うように設計される。  (もっと読む)
(もっと読む)
材料加工方法および装置
本装置(50)は、居住可能な建造物の表面を加工する。本装置(50)は、相互作用領域にレーザ光を供給するように適合させたレーザの基本ユニット(300)を含み、レーザ光が、建造物から材料を取り除く。レーザの基本ユニット(300)は、レーザ発生器(310)と、レーザ発生器(310)に連結されたレーザヘッド(1200)とを含んでいる。レーザヘッド(200)は、相互作用領域から材料を取り除くように適合され、それにより、建造物内における活動への破壊性を減少させ得る。本装置(50)は、建造物に取り外し可能に連結され、レーザヘッド(1200)に取り外し可能に連結されるように適合させた固定用メカニズム(1110)をさらに含んでいる。本装置(50)は、レーザの基本ユニット(300)に電気的に接続された制御器(500)をさらに含んでいる。制御器(500)は、使用者の入力に応答して、レーザの基本ユニット(300)に制御信号を送信するように適合されている。 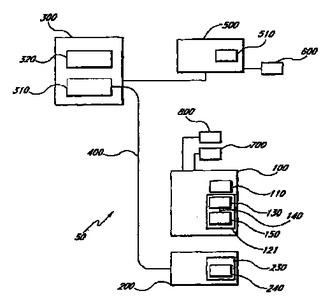 (もっと読む)
(もっと読む)
141 - 144 / 144
[ Back to top ]