
Fターム[4F035CB11]の内容
Fターム[4F035CB11]の下位に属するFターム
垂直方向 (9)
水平方向 (86)
途中で方向を変えるもの (17)
Fターム[4F035CB11]に分類される特許
1 - 7 / 7
基板処理装置
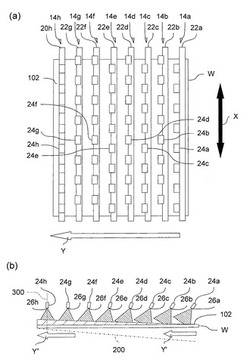
【課題】基板主面の全面に亙るウェット処理の均一化を図り、処理の歩留まりの向上や品質改善を達成することができる基板処理装置を提供する。
【解決手段】スプレーパイプ部22と、スプレーパイプ部22の長手方向に一列に互いに近接して形設され薬液をその吐出口26から基板Wの表面102へ吐出する複数のノズル部24から構成される複数のスプレーノズル14とを備え、基板Wの表面102に対する複数のノズル部24の吐出口26の対向角度を、傾斜させた姿勢で搬送される基板Wの表面102の傾斜下端方向に向けて、基板Wの表面102の傾斜上端部付近から傾斜下端部付近にかけて、基板Wの表面102の法線300に対して漸次小さくなるように、複数のノズル部24を複数のスプレーパイプ部22に形設することにより、基板Wの表面102上において吐出後の薬液の流速を傾斜上端部付近では相対的に小さく傾斜下端部付近では相対的に大きくする。
(もっと読む)
塗装システム

【課題】例えば、車体本体に対して揺動可能に連結されたドア等を容易に開状態とすることが可能であり、しかも、作業効率に優れる塗装システムを提供する。
【解決手段】塗装システム10は、塗装ロボット14a〜14dと、オープナーロボット16とを有する。例えば、塗装ロボット14a〜14dは、壁24、26に敷設された第1案内レール28に変位自在に係合された走行台車32を介して設けられ、一方、オープナーロボット16は、壁26に敷設された第2案内レール30に変位自在に係合された走行台車34を介して設けられる。
(もっと読む)
塗装ロボットの配置
本発明は、塗装ブース(10)の中に固定状態で取り付けられた塗装ロボット(12,13,14,15)の配置に係り、この塗装ブースは、仮想垂直平面(20)により、第一の空間領域及び第二の空間領域に分轄され、重複する作業エリアを有する少なくとも二つの塗装ロボットが、前記二つの領域の内の少なくとも一つの中に配置されている。塗装ロボットのそれぞれの基準点は、関係する塗装ロボットの、第一の回転軸と塗装ロボット・ベースとの交点である。各基準点は、塗装位置で塗装される予め定められた対象物の垂直方向で最も高いポイントにより決定される仮想水平平面の上方に配置され、これらの基準点は、垂直方向に、および/または、前記垂直平面に対して直角に、水平方向に、互いに対してオフセットされる(オフセット16参照方)。 (もっと読む)
接着剤塗布設備
【課題】省エネルギー化と省スペース化を実現するとともに接着剤塗布におけるワーク処理数を向上させる。
【解決手段】 ワーク搬送装置6はワーク保持爪11A,11Bを一対備え、その一対のワーク保持爪11A,11Bがワーク供給排出部2とワーク支持部4の間を一体に往復移動して、一往復のうち、ワーク供給排出部2からワーク支持部4に向かう往路で、一方のワーク保持爪11Aが内筒1をワーク支持部4に搬送供給し、ワーク支持部4からワーク供給排出部2に向かう復路で、他方のワーク保持爪11Bが接着剤塗布済みの内筒1をワーク供給排出部2に戻し搬送供給する。
(もっと読む)
移動する紙ウェブ又は厚紙ウェブにコーティングする装置
【課題】移動する紙ウェブ又は厚紙ウェブに、粘性の高いコーティング配合物を、平滑にコーティングする装置を得る。
【解決手段】紙、又は板紙の移動するウェブにコーティング配合物をコーティングする装置において、紙、又は板紙の移動するウェブの表面を支持する支持手段19,20と、コーティングするアップリケータユニット16とを具え、このアップリケータユニット16は、ウェブの幅にわたり配置された複数個の高圧無気式の噴霧ノズル17であって、各噴霧ノズルの噴霧パターンにおける噴霧ノズルから発射される微粒化噴霧がウェブ表面に接触するポイントでの直径がウェブの幅より小さいものとなるよう構成した該噴霧ノズルと17、ウェブの支持されていない側の表面に前記複数個の噴霧ノズルを包囲する寸法および形状を有してこれら複数個の噴霧ノズル17を包囲するよう位置決めしたノズル包囲体とにより構成する。
(もっと読む)
洗浄装置
【課題】洗浄液の噴射によって被搬送物が停滞するようなことがなく、被搬送物を安定して搬送できる洗浄装置を提供する。
【解決手段】洗浄装置1は、水平姿勢の容器Wを搬送する水平搬送手段2と、傾斜姿勢の容器Wを傾斜姿勢に保持しながら搬送する傾斜搬送手段3とを備える。洗浄装置1は、水平搬送手段2から容器Wを受け取りこの受け取った容器Wを水平姿勢から傾斜姿勢に姿勢変更しつつ傾斜搬送手段3に向けて案内する姿勢変更案内手段4と、傾斜搬送手段3にて搬送中の傾斜姿勢の容器Wに向けて洗浄液を噴射する洗浄液噴射手段6とを備える。
(もっと読む)
塗装装置、製造方法
【課題】塗装装置で複数のワーク毎に塗装を実施するにあたり、各ワークを搬送する搬送ロボットを干渉を発生させないように制御する。
【解決手段】ワーク受取場から塗装ブースへの投入動作、塗装中の支持動作、塗装後の塗装ブースからワーク引渡場への送出動作、及び、ワーク引渡場からワーク受取場への復帰動作からなる一連の動作を遂行する複数の搬送ロボット(例えばFr,Rr)と、各搬送ロボットの前記一連の動作を各動作シーケンスに従って制御する制御装置とを備える。各動作シーケンスは、ワーク受取場またはワーク引渡場において搬送ロボットとこの搬送ロボットに搬送されないワークとの干渉を防止する第1制御条件、及び、共にワークを保持した搬送ロボット同士の交差に起因する干渉を防止する第2制御条件を満たす位相ずれ関係を有する。
(もっと読む)
1 - 7 / 7
[ Back to top ]