
Fターム[5B057AA05]の内容
Fターム[5B057AA05]に分類される特許
201 - 220 / 242
手持ち型画像処理装置
非接触の形で対象物を検査するための手持ち型検査装置を提供する。本装置は、検査する対象物から投射または反射された光線を集めるように構成されたテレセントリックレンズを有したテレセントリックレンズ構成部と、テレセントリックレンズに対して、テレセントリックレンズが集めた光線を受け取り、これらを変換して対象物を表す画像を作る、という形に構成されたCCDデジタルカメラなどのモバイル撮像デバイスと、を有し、対象物から遠ざかる方向または対象物に向かう方向に装置が移動することで、撮像デバイス上で画像は同じサイズを保つ、という形になるようにテレセントリックレンズが構成されている。効果的な構成として、着脱可能な形でカメラに設置され、目的に応じて交換可能な照明ユニットを備える。  (もっと読む)
(もっと読む)
情報処理装置および方法、プログラム、並びに記録媒体
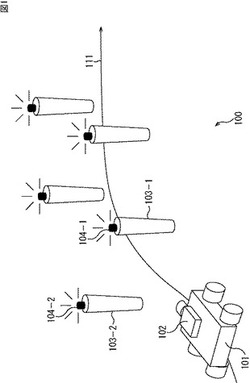
【課題】 高速でかつ、ロバスト性の高い自律移動を行うことができるようにする。
【解決手段】 自動車101は、走行路面上に存在する障害物103−1、103−2、・・・に取り付けられた光源104−1、104−2、・・・をカメラ102で撮影することにより、光源104が点滅信号として発信する識別情報を取得し、どの方向にどのような障害物があるかを認識することにより、障害物を避けて走行し、矢印111に従って自動車101が自律的に走行することになる。本発明は、自動走行システムなどに適用することができる。
(もっと読む)
ロボットおよびロボットを登録する方法

ロボット(40)が、器具または道具(46)を運搬する制御可能なアーム(43、44)を有する。ロボット(40)は、加工対象物上に存在するマーカー(2)およびインジケーター(22)の画像を含む加工対象物の画像を取得するためのカメラ(45)を備える。ロボット(40)は、ロボット(40)の空間基準座標系内のマーカー(2)の位置を決定するために画像を処理する工程を有する。ロボット(40)は、加工対象物に対して相対的にアーム(43、44)が運搬する器具または道具(46)の既定の動きを実行するため制御される。マーカー(2)が隠れているときにインジケーター(22)の位置を決定しロボット(40)の空間基準座標系内のインジケーター(22)の動きに反応して、インジケーター(22)の新しい位置およびそれにより加工対象物の新しい位置を決定するため、さらにプロセッサーが配置される。その後ロボット(40)は、加工対象物の新しい位置に対して相対的に制御され、加工対象物に対して相対的に既定の動きを実行する。 (もっと読む)
ロボットと干渉判別方法と干渉判別装置
【課題】 ロボットのロボットハンドと周辺物体との干渉の有無を判別する技術を実現する。
【解決手段】 ロボット10は、アームリンク12と、ロボットハンド14と、カメラ18と、画像処理手段17と、ワーク位置演算手段と、移動経路演算手段と、移動空間演算手段と、判別手段とを備えている。ワーク位置演算手段は、カメラ18が撮影したワークの画像を画像処理手段17で画像処理した結果から、ワークの位置と姿勢を演算する。移動経路演算手段は、ワークの位置と姿勢から、ロボットハンド14の移動経路を演算する。移動空間演算手段は、ロボットハンド14を包含する形状が移動経路に沿って移動する結果得られるロボットハンド14の移動空間の形状と位置を演算する。判別手段は、ロボットハンド14の移動空間の形状と位置と、周辺物体が存在する空間の形状と位置を比較し、両者の干渉の有無を判別する。
(もっと読む)
適応型ビジュアルフィードバック制御方法
【課題】 3次元空間の動きに対応するとともに、目標軌道へ高精度に追従することが可能で、煩雑なパラメータを必要としないリンク機構のビジュアルフィードバック制御方法を提供する。
【解決手段】 ロボット1の動作を制御する際に、撮像装置で取得した情報を基に判定した実際のハンド・アーム位置r(qk)と、目標位置rd(tk)との差に基づくフィードバック制御(図の中段)と目標位置rd(tk)の差分に基づくフィードフォワード制御(図の上段)に加えて、将来の目標位置rd(tk+1)から求めた目標関節角qd(tk+1)と実際の現在の関節角q(tk)との差分に基づいて制御を行う予見制御項(図の下段)を追加する。さらにヤコビアン行列をヤコビアン行列推定部203でオンライン推定する。
(もっと読む)
エッジトラッキング方法及びそのコンピュータプログラム
【課題】人間の体等の動く対象物を高フレームレートで一連の画像でトラッキングすることを可能にする方法を提供する。
【解決手段】対象物の一連の画像中でエッジをトラッキングする方法は、対象物のモデルを準備するステップと、対象物のモデルのエッジを画像の画像平面に投影するステップ(180)と、画像平面上に投影されたエッジの各々の周囲の予め定められた区域内で画像のエッジ画素の組を探索するステップ(182、184及び186)と、投影されたエッジの各々のエッジ画素の組に当てはまる線分を求めるステップ(188)と、投影されたエッジの各々について、この線分を規定する所定のパラメータの組でその線分を表すステップ(190)と、この線分を用いて対象物のモデルを更新するステップと、を含む。
(もっと読む)
画像処理装置及び画像処理方法
【課題】複数カメラにより異なるフレーム時刻に撮影された画像対を用いる際のステレオ画像処理の誤差を低減して対象物の3次元位置情報を算出する。
【解決手段】第一の撮像装置により移動体をフレーム時刻tに撮像することにより得られる第一の画像と、異なる視点の第二の撮像装置により移動体をフレーム時刻t+Δtに撮像することにより得られる第二の画像と、該第二の撮像装置により移動体をフレーム時刻t−Δtに撮像することにより得られる第三の画像とを取得する。第一の画像上の任意点に対応する第二の画像上の第一対応点を探索し、該任意点についての視差を計測する。第二の画像と第三の画像とに基づいて、第一対応点の動き情報を算出し、これを補正量として用いて視差を補正する。補正された視差に基づいて任意点の3次元位置情報を算出する。
(もっと読む)
コミュニケーションロボットおよびそれを用いた動作識別システム
【課題】計算時間を低減して人間の行動を正確に特定できるコミュニケーションロボットおよびそれを用いた動作識別システムを提供する。
【解決手段】動作識別システム10はコミュニケ−ショロボット12を含み、コミュニケ−ショロボット12は人間が所持する、または人間の近傍に存在する物品のタグIDを検出する。コミュニケーションロボット12は、検出したタグIDから人間の動作候補を決定する。また、コミュニケ−ショロボット12は、眼カメラで、人間の画像(映像)を撮影する。そして、動作候補の各々と撮影画像との類似度を算出し、撮影画像が示す動作を、類似度が最も高い動作として特定する。
(もっと読む)
直交する2本の直線軸の交点において保持可能な各種撮影対象物の全表面撮影装置
【目的】 比較的軽量且つ小型な各種撮影対象物についてその外観表面の全体を簡単且つスピーディに同一撮影条件下で撮影して物品の全表面を撮影する装置を提案する。
【構成】 撮影対象物2を保持手段3によって保持したままで該撮影対象物2を所定の直線軸4を中心として回転させる回転手段と前記所定の直線軸4と直交する別の直線軸6を中心として回転させる別の回転手段とを有しており、両直線軸4、6の交点において前記保持手段3により撮影対象物2を保持した状態で両回転手段を同時に回転させることで、両直線軸4、6の延長線上以外の任意の箇所に固定した撮影ポイントからの撮影手段による連続的撮影によって撮影対象物2の全表面を撮影することを特徴とする直交する2本の直線軸の交点において保持可能な各種撮影対象物の全表面撮影装置1である。
(もっと読む)
自動追尾装置及び自動追尾方法
【課題】 テンプレート画像の背景への貼り付きを減少させるとともに、他の物体による隠蔽の影響を低減し、追尾を安定化させることができる自動追尾装置を提供する。
【解決手段】 テンプレートマッチング部103は、カメラ8によって撮像された入力画像と登録済みのテンプレート画像との相関を算出して相関が高い領域を探索する。背景ベクトル推定部104は物体以外の背景の動きベクトルを推定し、頭部検出部105は、フィルタ処理を施して頭部らしさを検出する。頭部追跡部106は、算出されたテンプレート画像との相関及び検出された頭部らしさを基に、頭部を追跡する。PTZ制御部107は、追跡した物体が画像の中央付近に映るように、カメラ8のパン、チルト、ズーム(PTZ)動作を制御する。
(もっと読む)
移動体用の障害物検出装置
【課題】姿勢安定装置のような機構を不要とし、かつハフ変換に比較して処理負荷を軽減することができる移動体用の障害物検出装置を提供する。
【解決手段】距離画像センサ11は、移動体本体2に搭載され移動体本体2が走行しようとする面を含む空間領域を斜め下向きに撮像する。基準画像記憶部15には、移動体本体2が平面上を走行する際に距離画像センサ11で生成されることが予測される角度範囲内の平面の距離画像が所定の刻み幅で候補基準画像として格納される。差分画像生成部12は、基準画像記憶部15に格納された複数の候補基準画像のうち距離画像センサ11で生成された距離画像との差分画像を生成し、基準距離画像選択部13は、差分画像において一致領域の面積が最大になる候補基準画像を基準距離画像として選択する。判断部14は、この基準距離画像に対する差分画像の一致領域以外を障害物が存在する領域とする。
(もっと読む)
移動ロボット
【課題】 移動に伴う障害物検出位置のズレの影響を低減して障害物の誤検知を防止可能にする。
【解決手段】 移動ロボット1は、所定の環境に対応する環境地図73を記憶する記憶部15と、自己の位置に対応した環境地図上の位置を認識する自己位置検出部9と、上記環境内を走査して被測定物の相対位置を検出する障害物検知部11と、検出された被測定物の相対位置に対応する環境地図上の位置に投票値を加算する投票部91と、検出された被測定物の相対位置に基づいて投票部91による投票値に重み付けする投票値算出部97と、加算された投票値の累積が所定のしきい値以上となったときに環境地図上の該当位置に物体が存在すると判定する物体判定部93と、を備え、投票値算出部97は、検出された被測定物との距離が大きくなるほど重みを小さくする反比例等の減少関数に従った重み付けにより投票値を算出する。
(もっと読む)
シミュレーション装置及びシミュレーション方法
【課題】 可動部を撮影した画像を用いて制御を行う設備又は装置の設計及び設置調整支援に有用なシミュレーション装置を提供する。
【解決手段】 可動部を撮影可能な撮像部と、撮像部で撮影した画像データに基づいて、可動部の位置情報を取得し、且つ当該位置情報が所定の条件を満たしているか否かを判定し、当該条件を満たしていると判定した場合、可動部を起動させるための制御信号を出力する制御部とを有する可動部を備えた設備又は装置のシミュレーション装置であって、
可動部のモデルを含むシミュレーション用の画像データに基づいて、可動部のモデルがシミュレーション用画像内に占める位置情報を取得する画像処理部120と、
画像処理部が取得したモデルの位置情報を表示する表示部140を有するように構成した。
(もっと読む)
自己位置標定用ランドマーク位置の登録方法
【課題】 ランドマーク位置を手作業により測定する必要がなく、簡単にかつ短時間で前記ランドマークの三次元位置を測定して登録することが可能で、任意にランドマークの設置を行うことができる自己位置標定用ランドマーク位置の登録方法を提供する。
【解決手段】 移動体の走行環境内に複数配置されたランドマークの三次元位置を自動登録する自己位置標定標用ランドマーク位置の登録方法において、前記移動体を基準座標系の原点から複数のランドマークが認識できる初期位置P0に移動させ、該初期位置から任意の距離移動させたときの移動状態量と該移動体から撮像したランドマーク画像のずれ量とを取得した後、前記移動状態量と前記ランドマーク画像のずれ量から前記初期位置を基準としたランドマークの相対三次元位置を算出し、該相対三次元位置を、基準座標系を基準とした三次元位置に座標変換して該基準座標系における三次元位置座標を算出する。
(もっと読む)
画像処理装置
【課題】複数のカメラから出力される画像(画像データ)を限られた転送速度で転送しても、パノラマ画像および十分な画質の詳細画像を得ることを可能とする。
【解決手段】複数のカメラCM1〜4を含んで構成されそれぞれのカメラから得られる画像FE1〜4からなる周囲画像を取得する全方位画像取得部11と、それぞれのカメラから得られる画像FE1〜4に対して重みMM1〜4を決定する重み決定部12と、それぞれのカメラから得られる画像FE1〜4について、それぞれの画像FE1〜4に対して決定された重みMM1〜4およびカメラの位置関係に基づいて、画像のデータ量を変更するためのパラメータPM1〜4をそれぞれ決定するパラメータ制御部13とを有する。
(もっと読む)
三次元物体認識装置
【課題】 正確なノイズ判定を行うことにより適切な物体認識を行うことが可能な三次元物体認識装置を提供すること。
【解決手段】 認識対象物の三次元形状データから一定範囲内のデータを抽出するデータ抽出部102と、データ抽出手段が抽出したデータに重み付けを行う重み付け部103と、重み付け部103により重み付けられたデータがノイズであるか否かを判定するノイズ判定部104と、ノイズ判定部104によりノイズではないと判定されたデータに基づいて、認識対象物に対する認識処理を行う認識部106と、を備える。
(もっと読む)
人間追跡装置及び方法、その方法を行うためのプログラムが記録された記録媒体とその装置を備えた移動型電子機器
【課題】人間の上体と足とを対象に人間を追跡すること。
【解決手段】人間追跡装置Hは、人間の少なくとも1つの上体位置情報を検出する上体位置情報検出モジュール100と、人間の少なくとも1つの足位置情報を検出する足位置情報検出モジュール110と、少なくとも1つの上体位置情報と少なくとも1つの足位置情報とを基に、追跡対象を選択する追跡対象選択モジュール130と、追跡対象選択モジュール130で選択された追跡対象を追跡するための移動型電子機器の追跡速度及び方向を計算する追跡速度及び方向計算部150と、移動型電子機器を駆動するモータ170と、追跡速度及び方向計算部150で計算された結果を基に移動型電子機器を駆動するためのモータを制御するモータ制御部160とを備える。
(もっと読む)
画像表示装置および画像表示方法
【課題】 三次元の全方向の範囲で、任意の方向の映像出力を得ると共に常に任意方向にあるターゲットの映像を固定して操縦者に提示することのできる画像表示装置および画像表示方法を提供する。
【解決手段】 複数台のカメラから入力された映像を表示する画像表示装置において、
前記映像を球面上に写像する演算を行うと共に、任意の方向の写像に基づき表示用の映像を生成する演算部と、
前記表示用の映像を表示する表示部と、
を有することを特徴とする画像表示装置。
(もっと読む)
ステレオカメラシステム及びステレオ光学モジュール
本ステレオカメラシステムは、ステレオ画像を得るためのステレオ光学モジュール(1)と、ステレオ光学モジュール(1)で得られたステレオ画像より対象となる被写体の評価を行う中央制御ユニット(3)と、ステレオ光学モジュール(1)から出力されるステレオ画像データを中央制御ユニット(3)に入力させるための通信回線(2)とから構成される。そして、本ステレオカメラシステムは、ステレオ光学モジュール(1)に、ステレオ光学モジュール(1)で取得したステレオ画像に対して所定の画像処理を施す画像出力処理回路(8)を設け、この画像出力処理回路(8)にステレオ画像撮像時のアンバランスを補正するための補正演算を行わせる。  (もっと読む)
(もっと読む)
ロボット装置
【課題】家庭環境のように照明条件が一定でない環境でも人物識別を可能とするロボット装置の提供。
【解決手段】画像を取得する映像取得手段と、画像中から人間の頭部を検出する頭部検出追跡手段と、検出された頭部の部分画像中から正面顔画像を取得する正面顔位置合わせ手段と、正面顔画像を特徴量に変換する顔特徴抽出手段と、識別辞書を用いて特徴量から人物を識別する顔識別手段と、識別辞書を保存する識別辞書記憶手段とを備え、を含む人物識別装置と、ロボットの動作を制御する全体制御部と、前記全体制御部の指示で音声を発話する音声出力手段と、前記全体制御部の指示でロボットを移動する移動手段と、を備える。
(もっと読む)
201 - 220 / 242
[ Back to top ]