
Fターム[5B057AA05]の内容
Fターム[5B057AA05]に分類される特許
141 - 160 / 242
複数の画像フレームを使用してパターンを読取るシステム、及び方法
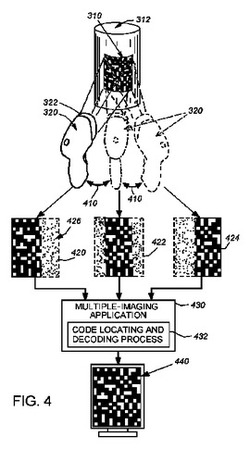
本発明は、記号の複数の画像フレームを使用し、対応するデータを含む記号を復号するシステム、及び方法を提供する。これらのフレームの少なくとも一部は、種々の撮像パラメタ(例えば、向き、レンズズーム、開口など)を有し、フレームと例示的マルチ撮像アプリケーション(430)の組み合わせにより、各フレームの最も読取りやすい部分を1つに結合することができる。さらに、一枚の「最良」画像を選択することがある従来のシステムとは違い、例示的システム方法によれば、この結合された画像を、元になった記号の完全な読取可能画像(310)にすることができる。システム、及び方法の一実施形態は、記号の複数の画像フレームを取得する撮像アセンブリを含み、画像フレームの一部は、他の画像フレームとは異なる個別の撮像パラメタを有する。撮像アセンブリに接続されたプロセッサは、前記記号の複数の取得画像フレームを処理し、前記複数の画像フレームのうちの少なくとも一部から所定のコードデータを復号し、前記複数の画像フレームのうちの少なくとも一部から得られた前記所定のコードデータを結合し、前記記号により表される前記データセットの復号可能バージョンを定義する。 (もっと読む)
把持装置および把持装置制御方法

【課題】 本発明は、複雑な把持動作が必要になる把持装置の制御を、円滑に行うことを目的とする。
【解決手段】 本発明は、把持手段に把持される被把持部材の位置および姿勢に関する情報を取得する情報取得手段と、前記取得された情報に基づき前記被把持部材の把持に適した状態である把持目標状態を取得し、当該把持目標状態に向かうように前記把持手段の移動経路を設定する移動経路設定手段と、前記設定された移動経路に沿って、前記把持手段を移動させ、前記被把持部材を把持させる制御手段とを有することを特徴とする。
(もっと読む)
ロボット装置の制御方法及びロボット装置
【課題】ロボット装置のマニピュレータを制御するにあたり、多くの基準画像を用意する必要がなく、計算負荷が軽く、迅速な制御が可能でありながら、マニピュレータの対象物に対する位置及び姿勢を3次元空間内において制御することができるロボット装置の制御方法を提供する。
【解決手段】カメラ6により取得した対象物101の画像を処理して得られる画像特徴量に基づき、逐次最小二乗法を用いて画像特徴量の変化速度とマニピュレータ1の各関節2a,2b,2c,2d,2e,2fの動作速度との関係式であるヤコビ行列を推定し、事前に目標位置において取得された対象物101の画像特徴量と対比して、マニピュレータ1の手先位置5が目標位置に近づくように各関節2a,2b,2c,2d,2e,2fの動作速度を求めてマニピュレータ1の指令信号とし、この指令信号に基づいてマニピュレータ1を動作させる。
(もっと読む)
3次元形状検出装置
【課題】この発明は、ケーブル等の独自の特徴点が少ない検出対象の画像情報からでも特徴点をより確実に抽出でき、より確実に3次元形状を検出できる3次元形状検出装置を提供することを目的とするものである。
【解決手段】回折格子41は、レーザ光発生器40とケーブル10との間に回動可能に配置されており、レーザ光発生器40のレーザ光を複数のスリット光42からなるパターン光43とする。処理手段は、パターン光43によりケーブル10に付加された複数の輝点10aを特徴点として抽出する。
(もっと読む)
脚式移動ロボット
【課題】搭載するカメラ(撮像素子)に太陽光などの高輝度の光源が写り込まれるときも撮影対象を適切な輝度値で撮影するようにした脚式移動ロボットを提供する。
【解決手段】頭部16に、撮影対象を含む外界からの入射光の軸線82b上の位置と軸線外の位置16c1の間で移動自在なフィルタ(バイザ)16cを設けると共に、CCDカメラ(撮像素子)によって撮像された画像に高輝度の入射光によって撮像された高輝度撮像部位があるとき、フィルタ16cを軸線上の位置に移動させて高輝度撮像部位の輝度を低減する。
(もっと読む)
画像相関処理装置、画像相関処理方法及び画像相関処理プログラム並びに対象物位置情報取得装置
【課題】撮像系の歪み補正などを行うことなく、複数の画像の相関処理を適切に行う。
【解決手段】複数の画像の相関処理を行う画像相関処理装置であって、前記複数の画像の各画像から部分画像を前記各画像上で位置をずらしながら順次選択する部分画像選択部121,122と、前記各画像から選択された前記各画像の部分画像に対してハフ変換を行うハフ変換部131,132と、前記ハフ変換された前記各画像の部分画像の相関値を算出する相関処理部150とを有する。
(もっと読む)
情報処理装置、および情報処理方法、並びにコンピュータ・プログラム
【課題】不確実で非同期な入力情報に基づく情報解析により、精度の高いユーザ位置およびユーザ識別情報を効率的に生成する構成を実現する
【解決手段】カメラやマイクによって取得される画像情報や音声情報に基づいてユーザの推定位置および推定識別データを含むイベント情報を入力して、複数のターゲットを設定した複数のパーティクルを適用したパーティクルフィルタリング処理を行い、フィルタリングによる仮説の更新および取捨選択に基づいてユーザの位置および識別情報を生成する。本構成によれば、不確実で非同期な位置情報、識別情報を入力情報としても確からしい情報を効率的に残存させることが可能となり、ユーザ位置やユーザ識別情報を効率的に確実に生成することが可能となる。
(もっと読む)
手指形状推定装置及び手指形状推定方法、並びにプログラム
【課題】手指をカメラで撮影した画像から、手首回旋動作などを含んだ手指の形状を、より正確に推定できるようにする。
【解決手段】手指の種々の形状に対応した画像データと、その画像データで示される形状のときの爪の位置を示す爪位置データとを記憶してデータベースを構成させる。そして、検出対象の手指を撮影して得た画像データから、爪の位置を検出し、その検出された爪の位置を、データベースに記憶された爪位置データと照合する。さらに、その照合でほぼ一致が検出された爪位置データに基づいて、その爪位置データに対応してデータベースに記憶された画像データを読み出し、その画像データで示される手指形状を、検出対象の手指の形状と推定する。
(もっと読む)
地図情報作成装置及びそれを備えた自律移動装置
【課題】自律移動装置に備えられる地図情報作成装置において、精度の良い地図情報を作成する。
【解決手段】地図情報作成装置1は、周囲の環境を認識して周囲情報を取得する環境認識部2と、環境認識部2が取得した周囲情報に基づいて地図情報を作成する地図情報作成部3と、自己の位置及び向きを変化させる駆動装置4と、地図情報作成部3が作成した地図情報に基づいて駆動装置4の動作を制御する制御部5と、地図情報を記憶する記憶部6と、地図情報と周囲情報とを照合して自己の位置情報を取得する位置認識部7と、を備える。地図情報作成部3は、地図情報と周囲情報とを照合した結果、位置情報の取得には使用されなかった周囲情報を基にして地図情報を更新するので、地図情報作成装置1は、自律的に移動しながら精度の良い地図情報を作成することができる。
(もっと読む)
多機能画像センサーシステム
【課題】使用目的に適合した画像センサーを構築可能な多機能画像センサーシステムを提供する。
【解決手段】カメラやバーコード読取器等の画像検出装置と、前記画像検出装置から出力された画像信号からその特徴を抽出、分析処理する画像処理装置と、前記画像処理装置の抽出、分析処理を使用目的に応じて制御する複数のソフトウェアを蓄積・管理してなるソフトウェア管理装置とからなり、使用目的に適応した画像検出装置を選択して画像処理装置に接続するとともに、前記ソフトウェア管理装置に蓄積・管理された複数のソフトウェアから用途に適合したソフトウェアを選択して、前記画像処理装置を制御し、使用目的に適合した画像センサーを構築可能にしてなる。
(もっと読む)
環境地図生成方法、及び移動ロボット
【課題】オドメトリによる誤差の影響を低減させ、データ抜けの少ない密な環境地図を生成することができる環境地図生成方法、及び移動ロボットを提供すること。
【解決手段】本発明にかかる環境地図生成方法は、移動ロボット100が参照する環境地図を生成する環境地図生成方法であって、現フレームより平面情報を検出するステップと、移動ロボット100の移動量に基づいて、現フレームの前に取得された前フレームの座標系を現フレームの座標系に変換するステップと、座標変換された前フレームを現フレームに重ね合わせるステップと、検出された平面情報と、重ね合わされた現フレームとに基づいて環境地図を生成するステップとを有するものである。
(もっと読む)
3次元形状計測装置および3次元形状計測方法ならびに部品実装装置
【課題】正しい3次元形状データを取得することができる3次元形状計測装置および3次元形状計測方法ならびにこの3次元形状計測装置を用いた部品実装装置を提供することを目的とする。
【解決手段】電子部品2に対して照射されたレーザ光の反射光を受光することにより電子部品2の3次元形状を計測する3次元センサ11において、1対のPSD21A,21Bの受光位置検出結果から走査光が所定の入射方向から誤差Δθだけずれて入射することに起因して、PSD21A,21Bにおいてそれぞれ生じる受光位置の誤差−ΔZx、ΔZxを分離して検出し、PSD21A,21Bからの出力値にそれぞれ誤差−ΔZx、ΔZxの補正分を加味した上で受光位置検出結果として出力する。これにより、走査光の入射方向のずれに起因する計測誤差を排除して、正しい3次元形状データを取得することができる。
(もっと読む)
物体の視覚的表現を学習するための学習システム及びコンピュータプログラム
【課題】事前知識のない物体の画像を収集し、分類できる学習システムを提供する。
【解決手段】学習システムは、カメラに接続されたフレームグラバと、物体をカメラの光軸に沿って平行移動させる移動プロセス178と、物体の画像があらかじめ決められた大きさの境界の範囲内にあり、その境界の範囲内でできるだけ大きくなるようにロボットの手の位置を決める位置決定プロセス180と、カメラの光軸に直交する2つの軸の回りで物体を回転させる回転プロセス184と、回転させた物体の画像を収集する画像収集プロセスと、収集した画像を使用してSVM分類器をトレーニングするトレーニングプロセス188とを含む。
(もっと読む)
射影変換収束演算処理方法
【課題】2つのカメラの撮像画像内の物体の平坦部を観測するために、それらの撮像画像間の射影変換を利用した収束演算処理を行なう方法において、その収束演算処理の収束性を確保しつつ、演算負荷を軽減する。
【解決手段】収束演算処理における射影変換行列の所定種類のパラメータ(n(i),d(i))の初期値(n0(i),d0(i))により規定される平面πa(i)が、観測対象の物体の平坦部を包含する実際の平面に対して傾斜した平面になることを該初期値(n0(i),d0(i))が満たすべき制約条件とし、該初期値(n0(i),d0(i))を該制約条件を満たす値に設定する。
(もっと読む)
脚式移動ロボット
【課題】カメラの撮像画像による床面の形状を認識するための演算処理を軽減しつつ、ロボットの適切な移動制御を行なうことを可能とする脚式移動ロボットを提供する。
【解決手段】ロボット1の移動時に、該ロボットの現在の動作制御のために使用している床面形状の情報により表される床面である現状想定床面に対するロボット1の脚体5L,5Rの複数歩分の着地予定位置を設定し、その各着地予定位置毎に、該着地予定位置の近辺に、ロボット1に搭載されたカメラ27L,27Rの撮像画像に投影する画像投影領域A(i)を設定する。設定した各画像投影領域A(i)をカメラ27L,27Rの撮像画像の撮像画像に投影してなる部分画像領域の画像に基づいて、各部分画像領域毎に、該部分画像領域内に撮像されている実際の床面である実床面部分領域Ar(i)の形状を表す形状パラメータ(n(i),d(i))を推定する。
(もっと読む)
対象物取出装置
【課題】曲面形状を有するワークを、実用的な時間で検出して、取出す。
【解決手段】少なくとも一部に曲面的な形状を有する対象物を取出すためのロボットを含む対象物取出装置が、対象物の濃淡勾配分布モデルを記憶する記憶手段と、対象物の濃淡画像を撮像する撮像手段と、撮像手段により撮像された濃淡画像から濃淡勾配分布を抽出する勾配抽出手段と、勾配抽出手段により抽出された濃淡勾配分布と記憶手段により記憶された濃淡勾配分布モデルとに基づいて、濃淡画像における対象物の位置または位置姿勢を検出する対象物検出手段と、対象物検出手段により検出された位置または位置姿勢の情報をロボットに関する座標系における位置または位置姿勢の情報に変換する検出情報変換手段と、検出情報変換手段によって変換された位置または位置姿勢にロボットを移動させて対象物を取出すロボット移動手段と、を含む。
(もっと読む)
物体検出方法
【課題】 この発明は,従来のカメラ画像を使ったパターンマッチングによる物体検出方法を改善し,対象物がシーン中で回転や傾いている時でも,演算量を少なくして高速に検出する。
【解決手段】 この物体検出方法は,距離センサを使って対象物とシーンの計測により、それぞれの形状データを求めて、それらを構成する点同士の位置の偏差を求め,その出現回数から対象物の移動量や回転量を求める。この物体検出方法は,従来のパターンマッチングと比べて,扱うデータ量が少なく,演算も加減算だけでよいため,シーン中の対象物を高速で検出することができる。さらに、実際の形状データを利用することにより見かけの形に影響されず、対象物の回転や傾きにも対応できる。
(もっと読む)
画像認識装置
【課題】 対象物の有無を精度良く認識することができる画像認識装置を提供する。
【解決手段】 画像認識装置1は、対象物を撮像する2つのカメラと演算処理ユニットとを備えている。演算処理ユニットは、各カメラによる対象物の撮像画像に基づいて、対象物の表面形状を多数の点の集合として三次元空間上に復元し、これらの復元点を含む三次元空間をボクセルに分割して三次元ボクセル群を生成し、更にその三次元ボクセル群をスライスして複数の二次元ボクセル群に変換する。そして、演算処理ユニットは、各二次元ボクセル群における各ボクセルに含まれる復元点の数をカウントし、そのカウント数から各ボクセルにおける対象物の存在確率を決定し、その結果に応じて対象物の有無を認識する。
(もっと読む)
画像認識装置
【課題】 対象物の有無を精度良く認識することができる画像認識装置を提供する。
【解決手段】 画像認識装置は、対象物を撮像する2つのカメラと演算処理ユニットとを備えている。演算処理ユニットは、カメラによる対象物の撮像画像に基づいて、対象物の表面形状を多数の点の集合として三次元空間上に復元し、これらの復元点を含む三次元空間をボクセルに分割する。そして、演算処理ユニットは、カメラと各復元点とを結ぶ各光線上に、復元点の存在確率が最も高くなるような存在確率分布を定義し、各光線が通過するボクセルに対し、定義した存在確率をそれぞれ対応付けし、各ボクセルについて対応付けされた存在確率の平均値をそれぞれ計算する。そして、演算処理ユニットは、各ボクセルについて対応付けされた存在確率の平均値に基づいて、各ボクセルに相当する位置に対象物が存在するかを判断する。
(もっと読む)
画像認識方法および把持装置
【課題】分岐点を有するワークの形状を、迅速、且つ、簡易に認識することのできる画像認識方法および把持装置の提供。
【解決手段】分岐点を有するワークを撮像し、二値化し、二値化画像からワークの下端を検出し、ワークの下端からワークの輪郭を追い、輪郭線が急に方向変化する点を分岐点と判断する画像認識方法において、二値化画像から、X方向の最大値、X方向の最小値、Y方向の最大値、およびY方向の最小値を抽出し、これらを辺に有する方形領域を定め、方形領域に属する端点を候補点とし、候補点からワークの下端を判定することを特徴とする画像認識方法および当該方法を実施するための把持装置。
(もっと読む)
141 - 160 / 242
[ Back to top ]